Навигация
Основы проектирования и конструирования машин
20859
знаков
8
таблиц
17
изображений
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
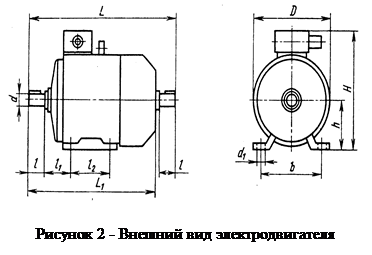
Таблица 1 - Трехфазные асинхронные электродвигатели общего назначения

Воронежский государственный технический университет
Кафедра проектирования механизмов и подъемно-транспортных машин
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению курсовой работы по дисциплине
“Основы проектирования и конструирования машин”,
для студентов специальности 060800
экстернатной формы обучения
Воронеж 2002
Составители: канд. техн. наук В.А.Нилов, канд. техн. наук Ю.В.Кирпичев, канд. техн. наук Б.Б.Еськов, И.Ю.Кирпичев
УДК 531.8-621.81.
Методические указания к выполнению курсовой работы по дисциплине “Основы проектирования и конструирования машин”, для студентов специальности 060800 экстернатной формы обучения / Воронеж. гос. техн. ун-т; Сост. В.А.Нилов, Ю.В.Кирпичев, Б.Б.Еськов, И.Ю.Кирпичев. Воронеж, 2002. 24 с.
Методические указания предназначены для студентов, выполняющих курсовую работу по дисциплине “Основы проектирования и конструирования машин”. Представлена методика структурного, кинематического анализа шарнирно-рычажного механизма. Приведенные расчетные зависимости позволяют студентам рассчитать и построить планы скоростей и ускорений, а также выполнить эскизную компоновку цилиндрического редуктора.
Рабочая тетрадь подготовлена в электронном виде в текстовом редакторе MS WORD и содержится в файле: Экстернат.doc.
Табл.4. Ил.20. Библиогр.: 7 назв.
Рецензент: канд. тех. наук В.Я. Иволгин
Ответственный за выпуск зав. кафедрой, канд. техн. наук В.А. Нилов
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
© Воронежский государственный
технический университет, 2002
СОДЕРЖАНИЕ И ПОСЛЕДОВАТЕЛЬНОСТЬ
ВЫПОЛНЕНИЯ КУРСОВОЙ РАБОТЫ
Курсовая работа по дисциплине “Основы проектирования и конструирования машин” для студентов-экстернатников специальности 060800 “Экономика и управление на предприятии” состоит из графической части, которая выполняется на двух листах плотной чертежной бумаге формата A1 (594x841) в карандаше и расчетно-пояснительной записки, написанной от руки или набранной машинописным текстом на листах писчей бумаги формата A4 (210x297) на одной стороне страниц где приводятся все расчеты по заданию.
1 ЛИСТ – Структурный и кинематический анализ рычажного механизма. Примеры оформления 1-го листа представлены в приложениях В, Г, Д и выбираются в зависимости от номера задания. В расчетно-пояснительной записке к первому листу должны быть отражены следующие вопросы:
1. Назвать все звенья механизма.
2. Построить план механизма.
3. Построить план скоростей.
4. Построить план ускорений.
2 ЛИСТ – Сборочный чертеж редуктора. Пример оформления 2-го листа представлен в приложении Е. В расчетно-пояснительной записке к первому листу должны быть отражены следующие вопросы:
1. Кинематический расчет и выбор электродвигателя.
2. Выбор материала колес редуктора.
3. Расчет закрытой зубчатой пары.
4. Расчет основных параметров и размеров зубчатых колес.
5. Расчет диаметров валов редуктора.
6. Выбор подшипников.
7. Выбор шпоночных соединений.
РАСЧЕТ 1-го ЛИСТА
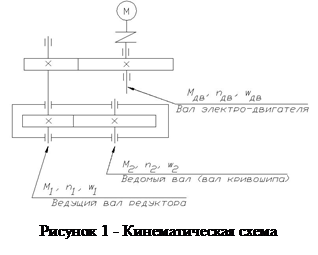
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
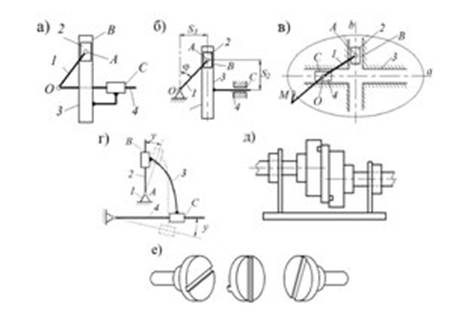
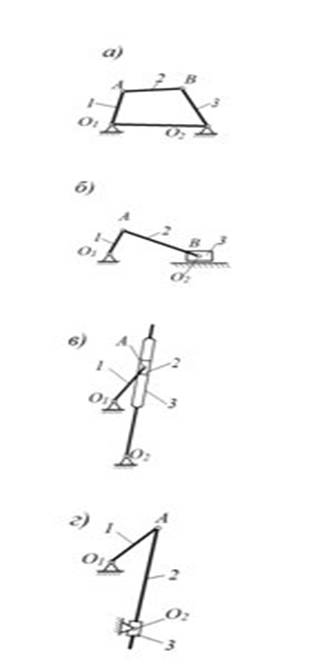
Кривошипно-рычажный механизм состоит из звеньев:
0 - стоек A и D, ось X-X
1 - кривошипа AB,
2 - шатуна ВС,
3 - кривошипа DE,
4 - шатуна FE,
5 - ползуна F.
Количество подвижных звеньев n=5; количество кинематических пар 5-го класса p=7.
ПЛАН МЕХАНИЗМА
При известных размерах звеньев механизма построение механизма в каком-либо положении осуществляется методом засечек, который заключается в геометрическом построении положения на плоскости центра вращательных пар. Последовательность построения (см. приложение A), с учетом заранее выбранного масштаба построения m плана механизма (для задания №1):
1) расположить на плоскости по заданным размерам элементы изображения стойки (точки A и D, ось x-x);
2) в одном из заданных углом j положений присоединить ведущее звено АВ;
3) из точки В и точки D провести дуги радиусом соответствующих заданных размеров (LBC, LCD), пересечение которых определит положение вращательной пары С;
4) на продолжении отрезка DC радиусом LDEнайти точки Е;
5) из точки Е радиусом LEF провести дугу до пересечения с линией x-x движения ползуна, пересечение которых определит положение поступательной пары, в точке F.
Ориентировочный интервал масштаба плана построения механизма ![]() . Значит, длины звеньев в масштабе (на чертеже) равны:
. Значит, длины звеньев в масштабе (на чертеже) равны:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ,
,
здесь и далее величина в скобках обозначает размер в миллиметрах на чертеже.
ПЛАН СКОРОСТЕЙ
Построение планов скоростей и ускорений проводится на основе последовательного составления векторных уравнений для точек звеньев механизма, начиная с ведущего звена, угловая скорость w1 которого задана.
Находим численное значение скорости точки B из выражения:
![]() (м/c)
(м/c)
Для того чтобы начать построение плана скоростей необходимо выбрать масштаб построения ![]() . Вычисляем масштаб:
. Вычисляем масштаб:
![]()
где ![]() мм (чем больше
мм (чем больше ![]() , тем крупнее построения).
, тем крупнее построения).
Выбираем на чертеже точку P - полюс плана скоростей. Строим вектор ![]() скорости точки B (рис.12, 16, 19). Вектор скорости точки B направлен в сторону вращения ведущего звена (см. направление w1), перпендикулярно звену АВ.
скорости точки B (рис.12, 16, 19). Вектор скорости точки B направлен в сторону вращения ведущего звена (см. направление w1), перпендикулярно звену АВ.
Скорость точки C определяется из векторной системы уравнений:
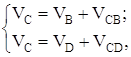 (1)
(1)
где ![]() - векторы абсолютных скоростей точек;
- векторы абсолютных скоростей точек; ![]() - векторы относительных скоростей (скорость точки С вокруг B и скорость точки С вокруг опоры D).
- векторы относительных скоростей (скорость точки С вокруг B и скорость точки С вокруг опоры D).
Система уравнений (1) решается графическим способом. При этом учитывается, что ![]() ,
, ![]() . Скорость точки D равна нулю
. Скорость точки D равна нулю ![]() (на плане скорость совпала с полюсом P).
(на плане скорость совпала с полюсом P).
Выполним построения для нахождения точки C:
1) Построим скорость ![]() , т.е. скорость точки С вокруг точки D – проведем на плане направление вектора
, т.е. скорость точки С вокруг точки D – проведем на плане направление вектора ![]() . Из полюса P проведем линию перпендикулярно звену CD.
. Из полюса P проведем линию перпендикулярно звену CD.
2) Построим скорость ![]() , т.е. скорость точки С вокруг точки B – проведем на плане направление вектора
, т.е. скорость точки С вокруг точки B – проведем на плане направление вектора ![]() через точку b плана скоростей.
через точку b плана скоростей.
3) Точка плана скоростей лежит на пересечении двух направлений ![]() и
и ![]() . Достраиваем вектор
. Достраиваем вектор ![]() - скорость точки С.
- скорость точки С.
4) Находим величину скорости точки С из плана скоростей:
![]() (м/c)
(м/c)
где ![]() - длина вектора на плане скоростей в миллиметрах.
- длина вектора на плане скоростей в миллиметрах.
Построим скорость точки Е для заданий №1,3 (рис.12, 19):
Т.к. точка Е принадлежит звену CD, значит направления скоростей точек С и Е совпадают, а длина вектора ![]() находится из пропорции:
находится из пропорции:
 ;
;  (мм)
(мм)
Откладываем из полюса P параллельно вектору ![]() длину вектора
длину вектора ![]() - получаем точку E на плане скоростей.
- получаем точку E на плане скоростей.
Построим скорость точки Е для задания №2 (рис.16):
Т.к. точка Е принадлежит звену CD, и находится между точками C и D, то найдем координаты конца вектора pc из пропорции:
 ;
;  (мм)
(мм)
Соединяем на плане скоростей точки b и c, и откладываем на этой линии из точки b найденную длину отрезка ![]() - получаем точку e на плане. Соединяя полюс P с точкой e, построим вектор
- получаем точку e на плане. Соединяя полюс P с точкой e, построим вектор ![]() .
.
Находим величину скорости точки E из плана:
![]() (м/c)
(м/c)
Скорость точки F определяется с помощью графического решения системы векторных уравнений:
 (2)
(2)
где ![]() - векторы абсолютных скоростей точек;
- векторы абсолютных скоростей точек; ![]() - векторы относительных скоростей;
- векторы относительных скоростей; ![]() - скорость движения системы координат (прямой x-x),
- скорость движения системы координат (прямой x-x), ![]() .
.
При решении уравнений (2) учитываем, что ![]() ,
, ![]() //x-x.
//x-x.
Выполним построения для нахождения точки F (рис.12, 16, 19):
1) Построим скорость ![]() , т.е. скорость точки F вокруг точки E – проведем на плане направление вектора
, т.е. скорость точки F вокруг точки E – проведем на плане направление вектора ![]() через точку e на плане скоростей.
через точку e на плане скоростей.
2) Через полюс P проведем линию параллельную направляющей оси x-x.
3) Точка F плана скоростей лежит на пересечении двух направлений (см. п.1 и 2). Достраиваем вектор ![]() - скорость точки F.
- скорость точки F.
4) Находим величину скорости точки F из плана скоростей:
![]() (м/c)
(м/c)
Из построенного плана найдем некоторые значения скоростей:
![]() (м/c)
(м/c)
![]() (м/c)
(м/c)
Скорости центров масс звеньев лежат на серединах соответствующих отрезков: S1 на ![]() ; S2 -
; S2 - ![]() ; S3 -
; S3 - ![]() ; S4 -
; S4 - ![]() ; S5=
; S5=![]() .
.
ПЛАН УСКОРЕНИЙ
Определим ускорение точки B, совершающей равномерное движение по окружности с радиусом кривошипа AB:
![]() (м/c2)
(м/c2)
Для того чтобы начать построение плана скоростей необходимо выбрать масштаб построения ![]() . Вычисляем масштаб:
. Вычисляем масштаб:
![]()
![]()
где ![]() мм (чем больше
мм (чем больше ![]() , тем крупнее построения).
, тем крупнее построения).
Выбираем на плоскости точку p - полюс плана ускорений. Строим вектор ![]() ускорения точки B (рис.13, 15, 18). Вектор
ускорения точки B (рис.13, 15, 18). Вектор ![]() направлен параллельно звену AB. Откладываем из полюса p длину вектора
направлен параллельно звену AB. Откладываем из полюса p длину вектора ![]() в направлении к центру вращения точки B (т.е. от точки B к точке A).
в направлении к центру вращения точки B (т.е. от точки B к точке A).
Ускорение точки C определяется из векторных уравнений:
 (3)
(3)
где ![]() - векторы абсолютных ускорений точек, при чем
- векторы абсолютных ускорений точек, при чем ![]() ;
; ![]() - векторы нормальных ускорений;
- векторы нормальных ускорений; ![]() - векторы тангенсальных ускорений.
- векторы тангенсальных ускорений.
Определим значения и длины отрезков нормальных ускорений:
 (м/с2),
(м/с2),
в масштабе плана  (мм).
(мм).
 (м/с2),
(м/с2),
в масштабе плана  (мм).
(мм).
Выполним построения для нахождения точки C (рис.13, 15, 18):
1) Для этого из точки b плана ускорений откладываем параллельно звену BC отрезок ![]() (нормальное направление ускорения) по направлению в сторону движения от точки С к точке В. Перпендикулярно BC проводим через конец этого отрезка линию - тангенсальное направление ускорения.
(нормальное направление ускорения) по направлению в сторону движения от точки С к точке В. Перпендикулярно BC проводим через конец этого отрезка линию - тангенсальное направление ускорения.
2) Из полюса p плана ускорений откладываем параллельно звену CD отрезок ![]() (нормальное направление ускорения) по направлению в сторону движения от точки С к точке D. Перпендикулярно CD проводим через конец этого отрезка линию - тангенсальное направление ускорения.
(нормальное направление ускорения) по направлению в сторону движения от точки С к точке D. Перпендикулярно CD проводим через конец этого отрезка линию - тангенсальное направление ускорения.
3) Пересечением 2-линий тангенсальных направлений получится точка C – вектор ![]() .
.
4) Находим величину ускорения точки С из плана ускорений:
![]() (м/c)
(м/c)
Построим ускорение точки Е для заданий №1,3 (рис.13, 18):
Ход построения ускорения точки Е аналогичен скорости. Т.к. точка Е принадлежит звену CD, значит, направления ускорений точек С и Е совпадают, а длина вектора ![]() находится из пропорции:
находится из пропорции:
 ;
;  (мм)
(мм)
Откладываем из полюса ![]() параллельно вектору
параллельно вектору ![]() длину вектора
длину вектора ![]() - получаем точку E на плане ускорений.
- получаем точку E на плане ускорений.
Построим ускорение точки Е для задания №2 (рис.15):
Ход построения ускорения точки Е аналогичен скорости, поэтому:
;  (мм)
(мм)
Находим величину ускорения точки E из плана:
![]() (м/c)
(м/c)
Определим значение и длину отрезка на плане нормального ускорения ![]() :
:
 (м/с2),
(м/с2),
в масштабе плана  (мм).
(мм).
Выполним построения для нахождения ускорения точки F (рис.13, 15, 18):
1) Для этого из точки e плана ускорений откладываем параллельно звену EF отрезок ![]() (нормальное направление ускорения) по направлению в сторону движения от точки F к точке E. Перпендикулярно EF проводим через конец этого отрезка линию - тангенсальное направление ускорения.
(нормальное направление ускорения) по направлению в сторону движения от точки F к точке E. Перпендикулярно EF проводим через конец этого отрезка линию - тангенсальное направление ускорения.
2) Через полюс p плана ускорений проводим линию параллельную оси x-x.
3) Пересечением 2-х направлений получится точка F – вектор ![]() .
.
4) Находим величину ускорения точки F из плана ускорений:
![]() (м/c)
(м/c)
Ускорения центров масс звеньев лежат на серединах соответствующих отрезков: S1 на ![]() ; S2 -
; S2 - ![]() ; S3 -
; S3 - ![]() ; S4 -
; S4 - ![]() ; S5=
; S5=![]() .
.
РАСЧЕТ 2-го ЛИСТА
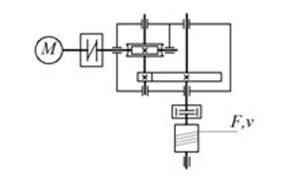
КИНЕМАТИЧЕСКИЙ И ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ.
Для того, чтобы привести в движение рычажный исполнительный механизм применяют электродвигатели.
По найденному уравновешивающему моменту ![]() , приложенному к кривошипу (входной вал рычажного исполнительного механизма), определяют вращающий момент на входном валу привода:
, приложенному к кривошипу (входной вал рычажного исполнительного механизма), определяют вращающий момент на входном валу привода:
![]() (Нм)
(Нм)
где ![]() – уравновешивающая сила,
– уравновешивающая сила, ![]() – длина кривошипа AB,
– длина кривошипа AB, ![]() – коэффициент запаса, определяемый в зависимости от неучтённых нагрузок, степени влияния сил и моментов трения, ошибки в положении силового расчета, условий эксплуатации и др.
– коэффициент запаса, определяемый в зависимости от неучтённых нагрузок, степени влияния сил и моментов трения, ошибки в положении силового расчета, условий эксплуатации и др.![]()
![]() .
.
Находим мощность на валу кривошипа:
![]() (Вт)
(Вт)
где ![]() – угловая скорость кривошипа, рад/с (см. в исходных данных
– угловая скорость кривошипа, рад/с (см. в исходных данных![]() ).
).
Определяют мощность на валу электродвигателя:
 (Вт)
(Вт)
где ![]() – КПД всего привода, равный произведению частных КПД передач, входящих в привод:
– КПД всего привода, равный произведению частных КПД передач, входящих в привод:
![]()
где ![]() – КПД закрытой передачи (редуктора);
– КПД закрытой передачи (редуктора); ![]() – КПД открытой зубчатой цилиндрической передачи;
– КПД открытой зубчатой цилиндрической передачи; ![]() – КПД подшипников качения.
– КПД подшипников качения.
По найденной мощности ![]() определяют тип трехфазного асинхронного электродвигателя, наиболее подходящего для конкретных условий работы (Таблица 1).
определяют тип трехфазного асинхронного электродвигателя, наиболее подходящего для конкретных условий работы (Таблица 1).
Трехфазные асинхронные электродвигатели, наиболее распространенные в различных отраслях народного хозяйства; их преимущества по сравнению с двигателями других типов: простота конструкции, меньшая стоимость, более высокая эксплуатационная надежность. При выполнении курсовых проектов следует выбирать для приводов именно эти двигатели.
Таблица 1 - Трехфазные асинхронные электродвигатели общего назначения
| Мощность, КВт | Частота вращения, 1500 об/мин |
| Типоразмер Двигателя | |
| 0,55 | 4А71А4У3 |
| 0,75 | 4А71В4У3 |
| 1,1 | 4А80А4У3 |
| 1,5 | 4А80В4У3 |
| 2,2 | 4А90L4У3 |
| 3,0 | 4А100S4У3 |
| 4,0 | 4А100L4У3 |
| 5,5 | 4А112M4У3 |
| 7,5 | 4А132S4У3 |
| 11,0 | 4А132М4У3 |
| 15,0 | 4А160S4У3 |
| 18,5 | 4А160М4У3 |
| 22 | 4А180S4У3 |
| 30 | 4А180М4У3 |
| 37 | 4А200М4У3 |
| 45 | 4А200L4У3 |
| 55 | 4А225М4У3 |
| 75 | 4А250S4У3 |
| 95 | 4А250М4У3 |
| 110 | 4А280S4У3 |
| 132 | 4А280M4У3 |
| 160 | 4А315S4У3 |
| 200 | 4А315S4У3 |
По требуемой мощности ![]() выберем ближайший двигатель.
выберем ближайший двигатель.
Выбираем из табл.1 электродвигатель: _____ кВт;
Похожие работы
... , хранении, употреблении, к огне- и взрывоопасное, к срокам периодического осмотра, контроля, переконсервации и т.п. ЛЕКЦИЯ 4 План лекции: 4.1. Организация процесса проектирования-конструирования и освоения технологического оборудования 4.2. Стадии и этапы разработки конструкторской документации 4.1. Организация процесса проектирования-конструирования и освоения технологического ...
... . Между понятиями красота в инженерном смысле и рациональность конструкции имеется связь. Рациональные конструкции кажутся красивыми, и красивые конструкции оказываются рациональными. Расчеты деталей машин при конструировании. Для предварительного определения размеров деталей применяют упрощенные условные расчеты, например, по номинальным напряжениям, позволяющие в удобной форме обобщать опыт ...
... приведены только частоты их вращения, то изображенные внутри корпуса передачи являются одним из вариантов синтеза редуктора. Рис. 2.6. Синтез механизма 7. Эксплуатационные свойства машин и механизмов 1. Надежность машин и механизмов как важнейшее эксплуатационное свойство. Под надежностью понимают свойство изделия выполнять заданные функции, сохраняя свои эксплуатационные показатели в ...
... , являющихся стандартными: стандартные детали изготовляются в массовом количестве и являются более дешевыми. Стандартные детали в значительной мере облегчают и упрощают ремонт и эксплуатацию машин. 1.2 Методы стандартизации В зависимости от поставленных целей и решаемых задач используют различные методы стандартизации. К методам стандартизации относятся: 1) систематизация (распределение ...
0 комментариев