Навигация
ВЫБОР ПРИВОДНОГО ЭЛЕКТРОДВИГАТЕЛЯ
27215
знаков
0
таблиц
14
изображений
2.7 ВЫБОР ПРИВОДНОГО ЭЛЕКТРОДВИГАТЕЛЯ
В качестве приводного электродвигателя обычно используется трехфазный асинхронный электродвигатель с короткозамкнутым ротором общепромышленного применения. Электродвигатель выбираем при соблюдении следующих условий:
![]() ;
;
![]() ,
,
где ![]() и
и ![]() - соответственно
номинальные паспортное и расчетное значения активной мощности на валу
ротора насоса;
- соответственно
номинальные паспортное и расчетное значения активной мощности на валу
ротора насоса;
![]() и
и ![]() - соответственно
номинальные паспортные значения частоты вращения роторов
электродвигателя и насоса.
- соответственно
номинальные паспортные значения частоты вращения роторов
электродвигателя и насоса.
Расчетная номинальная мощность на валу ротора насоса при дроссельном регулировании скорости
 ,
,
где ![]() - расчетная мощность на
валу ротора насоса, кВт;
- расчетная мощность на
валу ротора насоса, кВт;
![]() - расчетное значение
номинального давления на выходном штуцере насоса ( точка А ), МПа;
- расчетное значение
номинального давления на выходном штуцере насоса ( точка А ), МПа;
![]() - значение номинальной
производительности ( подачи ) на выходном штуцере насоса ( точка А ), м3/с;
- значение номинальной
производительности ( подачи ) на выходном штуцере насоса ( точка А ), м3/с;
![]() - общий КПД выбранного
типоразмера насоса.
- общий КПД выбранного
типоразмера насоса.
 кВт.
кВт.
Выбираем трехфазный асинхронный электродвигатель с короткозамкнутым ротором 4А132М4У3, имеющий следующую техническую характеристику:
номинальная мощность - 4 кВт>2 кВт;
синхронная частота вращения - 25 об/с=![]() =25 об/с;
=25 об/с;
масса – 100 кг.
3 РАЗРАБОТКА МИКРОКОНТРОЛЛЕРНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
3.1 ВЫБОР МИКРОКОНТРОЛЛЕРА
Для обработки информации с датчиков положения, выполнения алгоритма работы и подачи управляющих сигналов на исполнительную гидравлическую аппаратуру применяем 28-выводный микроконтроллер PIC14000, тактовая частота которого без применения кварцевого резонатора 4МГц, объем ОЗУ 192 байта, 22 линии ввода-вывода, объем ПЗУ 4Кх14.
Данный микроконтроллер – дешевое микроэлектронное устройство, имеет достаточные технические характеристики для обслуживания разрабатываемой системы синхронизации.
Основные функции микроконтроллера в разрабатываемой системе – это опрос четырех датчиков положения, десяти датчиков давления, шести элементов фильтрации рабочей жидкости, проведение расчетов по алгоритму работы и выдача сигналов управления на предохранительные клапаны, дросселирующие распределители и приводные электродвигатели.
Функциональная схема микроконтроллерной системы управления представлена на рисунке 3.1.
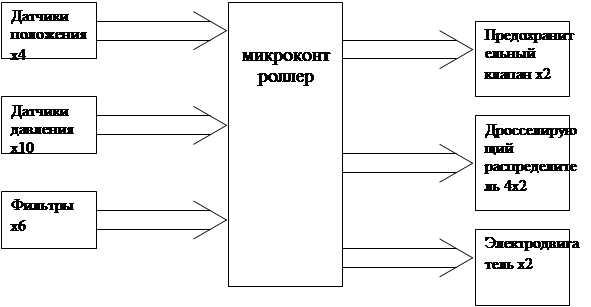
Рисунок 3.1 – Функциональная схема микроконтроллерной системы управления
3.2 ВЫБОР ДАТЧИКА ПОЛОЖЕНИЯ И РАСЧЕТ СХЕМЫ СОПРЯЖЕНИЯ С МИКРОКОНТРОЛЛЕРОМ
Для обеспечения измерения рабочего диапазона перемещения траверсы используем закрытую систему измерения линейных перемещений на базе фотоэлектрической линейки LS-623 со следующими техническими характеристиками:
- рабочий диапазон измерений – 2540мм;
- межштриховой шаг – 20мкм;
- системная точность ![]() 10мкм;
10мкм;
- разрез линейки (высота х толщина) 75х37мм.
Система имеет прямоугольные импульсы (ТТL-выход).
Выбранная система измерения линейных перемещений удовлетворяет всем требованиям по монтажу, габаритным размерам и диапазону измерения.
Схема сопряжения датчика положения с микроконтроллером представляет собой набор счетчиков, которые считают импульсы от датчика и через регистр-защелку передают данные в порт микроконтроллера.
Расчет необходимых параметров схемы сопряжения выполняем для рабочего хода траверсы при максимальной скорости движения ![]() =30 мм/с и минимальной скорости движения
=30 мм/с и минимальной скорости движения ![]() =0,2 мм/с. Опрос датчиков положения необходимо организовать через каждые 2 секунды – время переходного процесса системы синхронизации по положению (определено при моделировании системы).
=0,2 мм/с. Опрос датчиков положения необходимо организовать через каждые 2 секунды – время переходного процесса системы синхронизации по положению (определено при моделировании системы).
С учетом того, что шаг линейки 0,02 мм (50 импульсов за 1с),
при ![]() =30мм/c:
за 2с количество импульсов от датчиков=2×30×50=3000имп.;
=30мм/c:
за 2с количество импульсов от датчиков=2×30×50=3000имп.;
при ![]() =0,2мм/c:
за 2с количество импульсов от датчиков=2×0,2×50=20имп.
=0,2мм/c:
за 2с количество импульсов от датчиков=2×0,2×50=20имп.
Т.о. опрос датчика положения контроллер будет вести через каждые 20 импульсов.
Для подсчета импульсов от датчика положения выбираем четырех разрядный счетчик К555ИЕ7.
Необходимое количество микросхем счетчиков для подсчета 20 импульсов – 2 шт., т.к. 20 в двоичном коде =25 (два 4-х разрядных счетчика).
Для фиксирования информации на выходе счетчика импульсов используем RS-триггер.
Логический элемент “И” К555ЛИ5, сигнал на выходе которого служит для установки информации на триггере и обнуления старшего счетчика импульсов.
В системе всего 4 датчика положения, информация с которых поступает на один порт А микроконтроллера.
После считанной информации с триггеров микроконтроллер через порт С сбрасывает те триггеры в 0, с которых прочитана информация. При этом в соответствующих регистрах накопителях ведется подсчет суммарного положения траверсы относительно нижнего штампа.
Принципиальная схема сопряжения датчика положения с микроконтроллером представлена на рисунке 3.2.
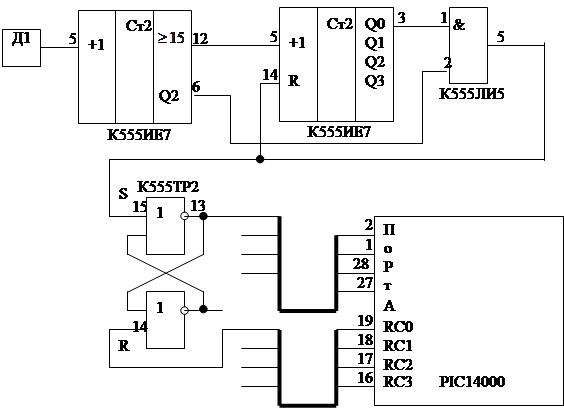
Рисунок 3.2 – Принципиальная схема сопряжения датчика положения с микроконтроллером
0 комментариев