1. Что такое момент инерции?
Отношение вращающего момента к угловой скорости.
2. Что такое передаточная функция?
Отношение выходного сигнала к входному.
3. Что такое переходная функция?
Реакция системы на единичный ступенчатый импульс.
3. Что такое весовая функция?
Реакция системы на функцию Дирака (единичный импульс в бесконечность).
4. Определение наблюдаемости.
Система наблюдаема если нет двух одинаковых начальных условий, которые приводят систему к одному и тому же конечному состоянию.
5. Определение управляемости.
Система управляема если выбором соответствующего управляющего воздействия её можно из любого начального состояния перевести в любое конечное состояние за конечное время.
6. Зачем надо проверять на наблюдаемость и управляемость.
Если мы проверим систему на наблюдаемость, а она не наблюдаема то мы не сможем потом выбрать управляющее воздействие, так как мы выбираем его после оценки состояния системы (в наблюдателе), а если она не наблюдаема, то мы и не можем его выбрать.
А если система не управляема, то мы соответственно не можем ею управлять, а нас это не устраивает.
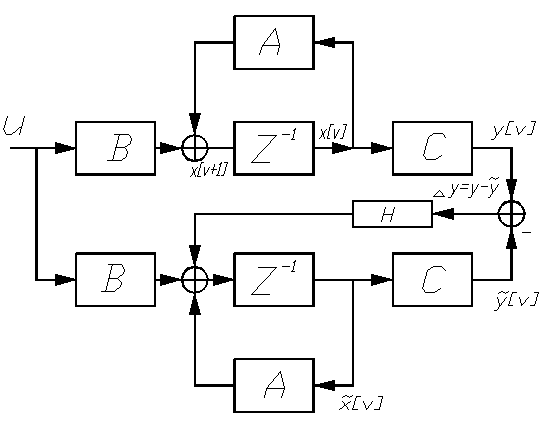
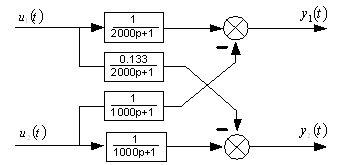
7. Где на схеме замкнутой системы наблюдатель, а где сам объект?
Верху сам объект, а снизу наблюдатель. И вообще всюду, где стоят над переменными тильды (волнистые линии), то это относится к наблюдателю, все остальное к объекту.
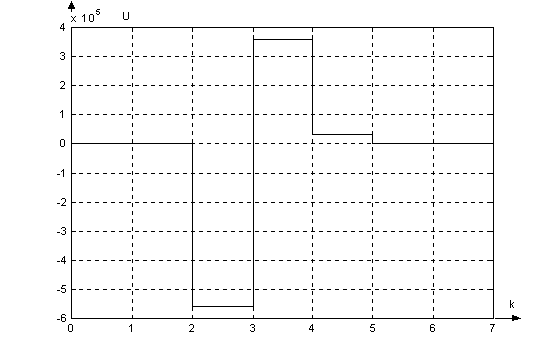
8. От чего зависит управление?
Управление зависит от переменных состояния системы:
![]() Объясняется
это тем, что на
регулятор мы
подаем именно
переменные
состояния, а
на его выходе
получаем управляющее
воздействие,
которое мы
потом подаем
на объект: U=-RX. Где
R-матрица регулятора.
Объясняется
это тем, что на
регулятор мы
подаем именно
переменные
состояния, а
на его выходе
получаем управляющее
воздействие,
которое мы
потом подаем
на объект: U=-RX. Где
R-матрица регулятора.
9. Где на схеме оценка состояния?
Всюду где стоят над переменными тильды, то это относится к наблюдателю, все остальное к объекту. А наблюдатель и дает нам оценку состояния.
10. Зачем находим матрицу Acr и Ach?
Матрицу Acr находим для того, что бы посмотрев её в 3й степени убедиться что, переходный процесс в объекте заканчивается за 3 такта (отсюда и третья степень).
Матрицу Ach находим для того, что бы посмотрев её в 3й степени убедиться что, переменные состояния совпадают с их оценкой.
11. Что связывает матрица A0?
Она
связывает
вектор XX который
равен: ![]() ,
где
,
где ![]() и
и
 .
.
Так вот она связывает этот вектор на ком шаге и этот же вектор на к+1 шаге, т.е.:
XX(k+1)=A0XX(k), (*)-запомните что это уравнение звездочка.
12. Как с помощью матрицы A0 получить таблицу?
Мы знаем начальные данные:
0
wноминальная
iноминальный
0
0 (последние три цифры это начальное состояние наблюдателя)
0
Так вот: зная эти начальные данные (они на нулевом такте, т.е. при к=0), подставляем их в уравнение (*)(да это именно то уравнение которое вы должны были запомнить), получаем значение вектора XX на к+1 такте, т.е. в нашем случае на 1 такте, и так далее по кругу, вычисляем значения вектора XX на всех тактах и видим что за 6 тактов процесс полностью заканчивается.
13. Как написать передаточную функцию по дифуру?
Передаточная функция представляет собой дробь, числитель которой получается путем замены производных степенями р в правой части дифура, а знаменатель - в левой.
14. Как по передаточной функции найти выходной сигнал зная входной?
Выходной сигнал получается так:
его амплитуда равна амплитуде входного сигнала домноженного на модуль передаточной функции на частоте входного сигнала.
а к фазе входного сигнала надо прибавить значение фазовой характеристики, опять же на частоте входного сигнала.
(это всё справедливо для синусоидального входного сигнала).
15. Если матрица R=(1 2 3) то чему будет равно управляющее воздействие?
Оно равно:
U=-R*X т.е. в нашем случае: U=-(1 2 3)*X.
16. Почему изображение переходной функции мы получаем деля изображение передаточной на р.
Потому что изображение единичной ступеньки (а как уже говорилось, переходная функция есть реакция на единичную ступеньку) равно 1/p.
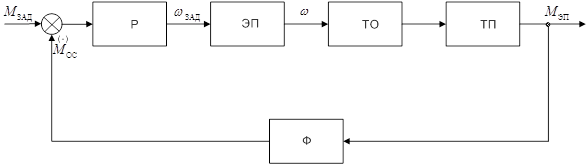
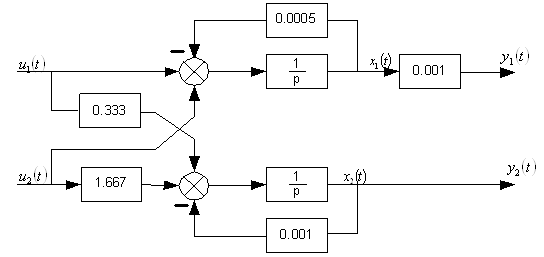
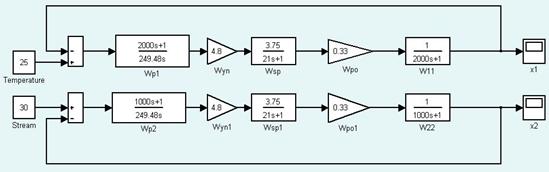
17. Как построили структурную схему объекта зная уравнения?
Начинаем строить её с нижнего дифура.
Принцип таков:
Берем три входных сигнала u, w, i, пропускаем через звенья с передаточными коэффициентами равными коэффициентам перед ними в дифуре, суммируем их, смотрим что получилось если производная то пропускаем сигнал через интегратор, получаем сам сигнал, далее соединяем ветви с одинаковыми сигналами. Так делаем со всеми дифурами, в итоге получаем вход, куда мы подаем U, и выход - y.
18. За сколько тактов заканчивается переходный процесс при выборе матрицы управления?
Он заканчивается за минимальное число тактов, которое равно порядку системы, в нашем случае - 3.
19. А за сколько тактов состояние наблюдателя совпадет с состоянием объекта?
20. А почему переходный процесс в замкнутой системе с наблюдателем и регулятором заканчивается за 2n тактов?
Потому что там уже есть и наблюдатель и система, а состояние наблюдателя совпадет с состоянием объекта через три такта, а переходный процесс в объекте закончиться еще через три такта, вот и получили 3+3=6 тактов.
21. Что такое ранг матрицы?
Это порядок наибольшего минора определитель которого не равен нулю.
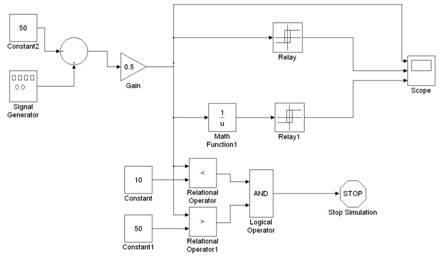
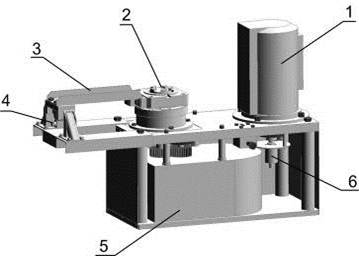
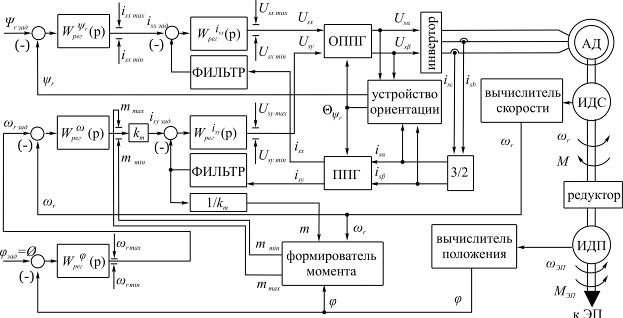
1. Составить структурную схему объекта управления.
Исходные данные:
| Номер варианта | 15 |
| Модель | ДПМ-12А |
| Мощность, Вт | - |
| Напряжение, В | 14 |
| Ток, А | 0,11 |
| Скорость вращения, об/мин | 6000 |
| Вращающий момент, Нм | 0,0018 |
| Момент инерции, кгм2 | 0,003 |
| Сопротивление, Ом | 28 |
| Индуктивность, Гн | - |
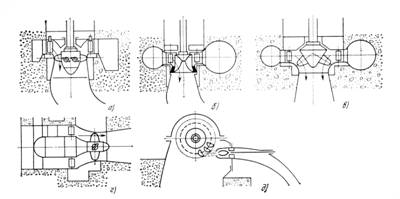
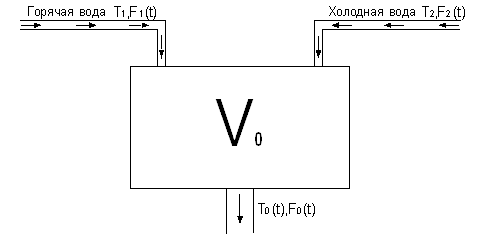
Объект управления – электрический привод с двигателем постоянного тока, описываемый уравнениями:
уравнение электрической цепи двигателя:
![]()
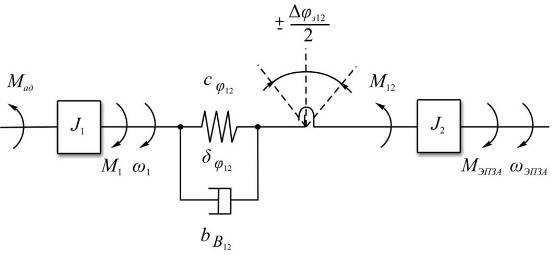
уравнение моментов:
![]()
уравнение редуктора:
![]()
где:
![]() - напряжение
на якоре двигателя.
- напряжение
на якоре двигателя.
![]() - ток якоря.
- ток якоря.
![]() - ЭДС вращения.
- ЭДС вращения.
![]() - момент,
развиваемый
двигателем.
- момент,
развиваемый
двигателем.
![]() - угол
поворота вала
двигателя.
- угол
поворота вала
двигателя.
![]() - угол
поворота вала
редуктора.
- угол
поворота вала
редуктора.
![]() - угловая
скорость.
- угловая
скорость.
![]() - коэффициент
передачи редуктора.
- коэффициент
передачи редуктора.
![]() - сопротивление
и индуктивность
якоря.
- сопротивление
и индуктивность
якоря.
![]() - конструктивные
параметры
двигателя.
- конструктивные
параметры
двигателя.
![]() - момент
инерции.
- момент
инерции.
![]()
Рассчитаем коэффициенты К1, К2:
![]()
![]()
![]()
Найдем индуктивность якоря:
![]()
Запишем систему уравнений описывающих систему:
Структурная схема объекта управления:
Система дифференциальных уравнений в форме Коши:
где:
Из написанной выше системы выразим:
![]()
далее:
Передаточная функция:
![]()
![]()
после подстановки:
после подстановки моих значений:
![]()
![]() ;
; ;
;
![]()
т.к. ![]() ,
то представим
передаточную
функцию в виде:
,
то представим
передаточную
функцию в виде:
![]()
![]()
![]()
![]()
![]()
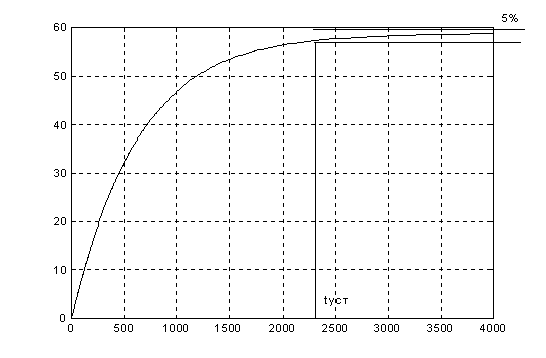
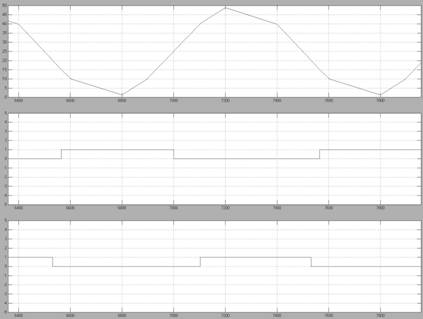
3. Построить логарифмические и переходные характеристики объекта.
Изображение переходной характеристики:
![]()
Воспользовавшись программой RLT.EXE (обратное преобразование Лапласа), получаем оригинал переходной характеристики:
![]()
График переходной функции.
 ;
;
![]()
Воспользовавшись программой, которая помогает построить переходную характеристику, получаем время переходного процесса:
![]()
а соответственно период квантования центральной ЦВМ составит:
![]()
Получили
большое время
дискретизации,
для того, что
бы в расчетах
воспользоваться
программой
SNT2.EXE уменьшим
его до: ![]()


Матрица управляемости дискретной модели объекта:
![]()
в числах:
![]()
т.е. система полностью управляема.
Матрица наблюдаемости дискретной модели объекта:
в числах:
![]()
т.е. система полностью наблюдаема.
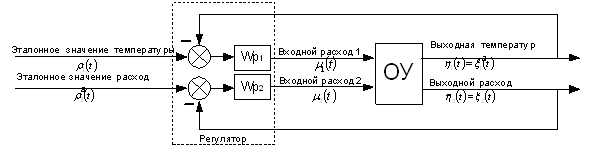
7. Рассчитать параметры цифрового регулятора состояния.
Матрица управления из условия окончания переходного процесса за минимальное число тактов:
![]()
где:
![]()
в числах:
![]()
Вектор обратной связи наблюдателя:
Структурная схема наблюдателя:
Уравнения состояния наблюдателя:
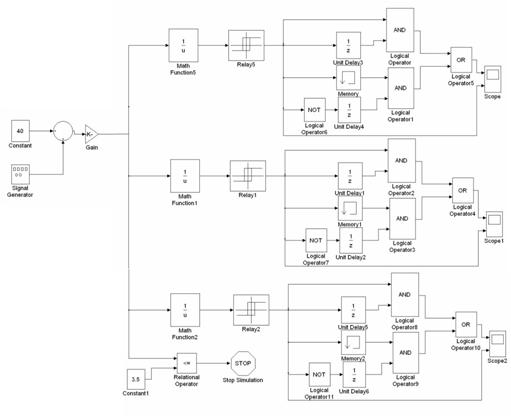
Структурная схема замкнутой цифровой системы, с наблюдателем:
Матрица замкнутой системы с регулятором состояния:
![]()
Если
посмотреть
матрицу ![]() то увидим, что
она очень мала,
т.е. за три такта
процесс полностью
устанавливается.
то увидим, что
она очень мала,
т.е. за три такта
процесс полностью
устанавливается.
Собственная матрица наблюдателя:
![]()
Если
посмотреть
матрицу ![]() то увидим, что
она очень мала,
т.е. за три такта
процесс полностью
устанавливается.
то увидим, что
она очень мала,
т.е. за три такта
процесс полностью
устанавливается.
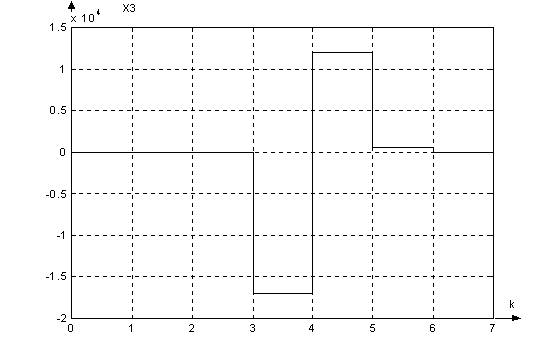
Вектор состояния замкнутой системы с регулятором и наблюдателем:
где:
![]() - переменные
состояния
объекта.
- переменные
состояния
объекта.
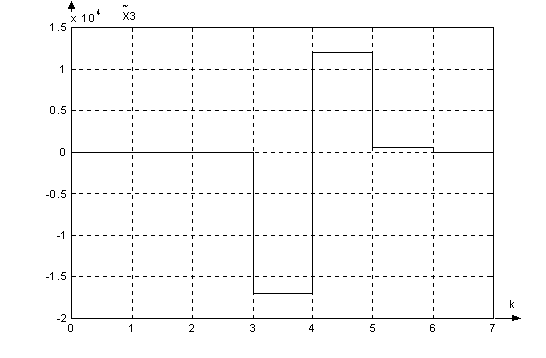
![]() - переменные
состояния
наблюдателя.
- переменные
состояния
наблюдателя.
![]()

Матрица замкнутой системы с регулятором состояния и наблюдателем:
![]()
Вектор начальных условий:
![]()
![]()
![]()
![]()
Решение уравнений состояния представим в виде таблицы:
|
|
|
|
|
|
|
|
|
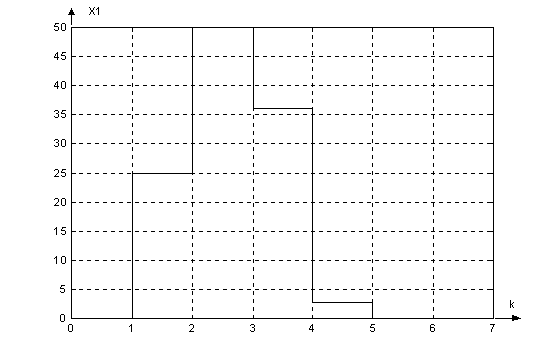
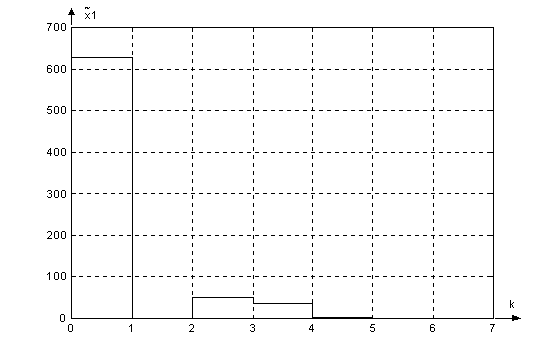
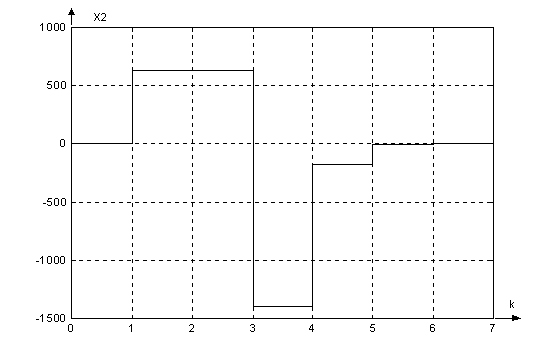
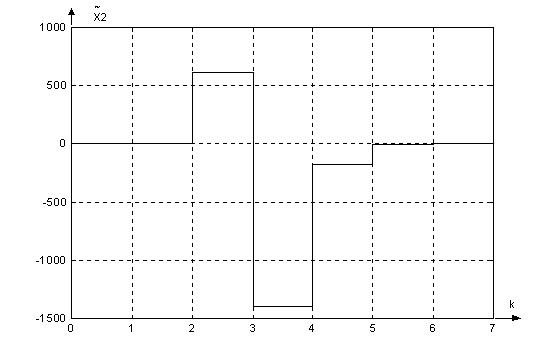
| 0 | 0 | 628,3 | 0,11 | 0 | 0 | 0 | 0 |
| 1 | 25 | 0 | 630 | 0 | -0,36 | 0 | 0 |
| 2 | 50 | 49 | 630 | 610 | -0,34 | -0,059 | -5,6105 |
| 3 | 36 | 36 | -1,4103 | -1,4103 | -1,7104 | -1,7104 | 3,6105 |
| 4 | 2,8 | 2,8 | -170 | -170 | 1,2104 | 1,2104 | 3,3104 |
| 5 | 0,058 | 0,058 | -4,7 | -4,7 | 520 | 520 | 710 |
| 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
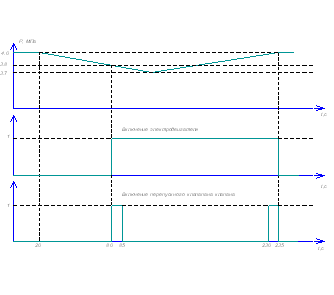
Графики
сигналов в
цифровой системе
с наблюдателем:
14
Похожие работы
... развились и на практике чаще применяют именно импульсные последовательности. Генератор импульсов‑ автогенератор ,вырабатывающий импульсы прямоугольной формы. Генераторы обеспечивают работу цифрового устройства и характеризуются частотой сигнала, стабильностью частоты, скважностью, видом последовательности сигнала и другими параметрами. В соответствии с принятыми условиями необходимо ...
... ). Подпрограмма завершена, управление передается назад вызывавшему модулю. 6. Технико-экономическое обоснование 6.1 Пути снижения затрат за счет внедрения системы Внедрение автоматической системы управления маслонапорной установкой гидроэлектростанции решает следующие задачи - Полностью автоматическая система управления маслонапорной установкой не требует участия человека ...
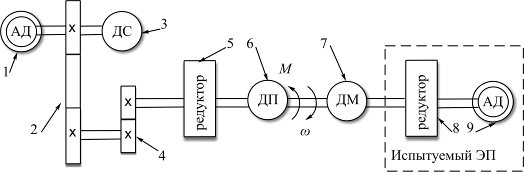
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
0 комментариев