Описание технологического процесса, как объекта управления
Классификация и перечень технологических переменных, анализ видов связи между технологическими переменными
Каналов ввода/вывода
Классификация и перечень управляющих воздействий, определение требуемой точности управления ТП
Функциональная структура системы управления ТП. Описание функциональных блоков системы
Математическое моделирование системы управления технологическим процессом
Структурный и параметрический синтез регуляторов системы управления технологическим процессом
Разработка алгоритмов работы регуляторов системы управления технологическим оборудованием
Навигация
Автоматическая система управления процессом испытаний электропривода лифтов
Автоматическая система управления процессом испытаний электропривода лифтов
63311
знаков
3
таблицы
31
изображение
Курсовой проект
по дисциплине
«Комплексная автоматизация технологических процессов»
Автоматическая система управления процессом испытаний электропривода лифтов
2009
План
Введение. 4
1 Описание технологического процесса, как объекта управления. 8
1.1 Описание технологического процесса и технологического оборудования 8
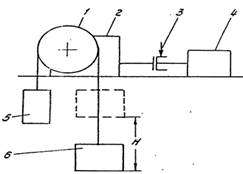
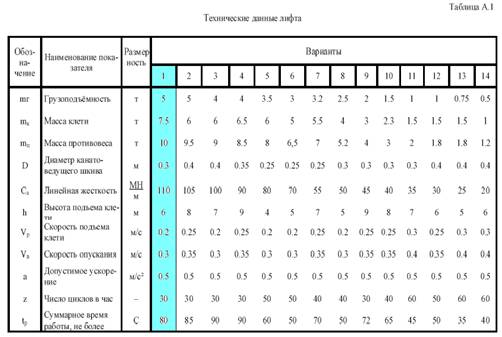
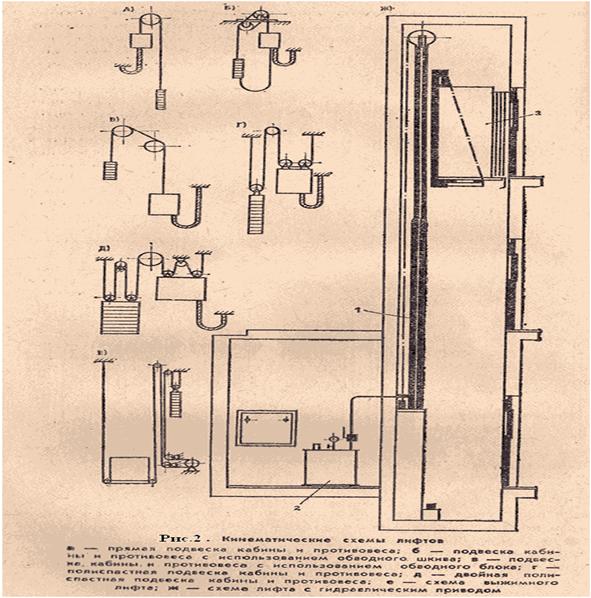
1.2 Технологические схемы процесса и оборудования. 9
1.3 Классификация и перечень технологических переменных, анализ видов связи между технологическими переменными. 12
1.4 Классификация и перечень измеряемых переменных состояния, определение требуемой точности управления технологическим процессом. Определение условий работы измерительных устройств. 15
1.5 Классификация и перечень управляющих воздействий, определение требуемой точности управления ТП. 20
1.6 Определение основных требований к ведению технологического процесса, формирование критерия качества и цели управления. 21
2. Разработка и выбор элементов АСУ ТП.. 23
2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание. 23
2.2 Функциональная структура системы управления ТП. Описание функциональных блоков системы.. 24
2.3. Определение уровней управления ТП и архитектуры верхнего уровня АСУ. 26
2.4. Блок схемы аппаратных средств уровней системы. Выбор аппаратных средств на всех уровнях управления. Вариант принципиальной схемы соединения между аппаратными блоками системы. 28
2.5. Выбор общего и специального программного обеспечения на всех уровнях АСУ ТП 28
2.6. Принципы обмена информацией между уровнями системы. Выбор интерфейсных устройств и протоколов обмена. 29
3. Математическое моделирование системы управления технологическим процессом. 31
3.1 Выбор среды моделирования и разработка математической модели технологического процесса и технологического оборудования с исполнительными электроприводами. 31
3.2 Структурный и параметрический синтез регуляторов системы управления технологическим процессом. 40
3.3 Разработка алгоритмов работы регуляторов системы управления технологическим оборудованием. 52
3.4 Компьютерное моделирование алгоритмов управления. Графическое представление результатов моделирования. 53
Заключение. 59
Список литературы.. 61
Введение
В настоящее время системы электропривода (ЭП) прочно занимают лидирующее место среди приводных устройств и обеспечивают бесперебойную и надёжную работу механизмов во многих областях техники и жизнедеятельности человека. Функциональные возможности и эксплуатационные параметры современных ЭП во многом определяются характеристиками применяемых систем управления. В качестве приводного двигателя в последнее время наибольшее распространение находит асинхронный двигатель (АД) с короткозамкнутым ротором. Современный асинхронный ЭП реализован на базе силовой полупроводниковой техники с применением микропроцессорного управления. Его возможности позволяют организовать регулирование выходных координат ЭП в широком диапазоне, с высоким быстродействием и большой точностью.
В настоящее время развитие систем асинхронного ЭП с микропроцессорным управлением позволяет путём создания новых программных алгоритмов синтезировать ЭП с широки набором эксплуатационных характеристик, что в свою очередь позволяет удовлетворить требования, накладываемые со стороны самых разных технологических объектов.
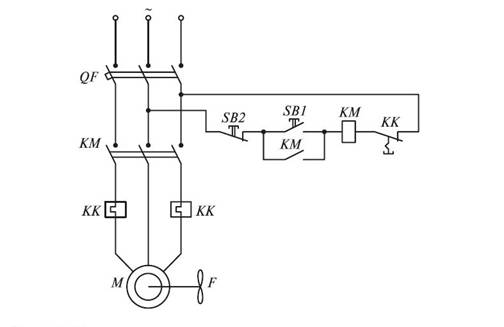
Электропривод подъемно-транспортных механизмов (ПТМ) в общем случае представляет собой сложный мехатронный модуль, объединяющий в своём составе систему управления, силовой преобразователь, асинхронный безредукторный двигатель с короткозамкнутым ротором. В качестве силового преобразователя может использоваться преобразователь частоты (ПЧ) или тиристорный регулятор напряжения (ТРН). Система управления обеспечивает требуемые режимы эксплуатации подъемно-транспортных механизмов, адекватную реакцию ЭП на изменение внешних условий, поддержку защитных функций и коммуникаций с другими устройствами.
Системы ПТМ широко применяются в технологических процессах при перевозке людей и транспортировке грузов. Сбой и нарушение работы ПТМ может привести к гибели людей и тяжёлым экономическим последствиям. В случае превышения допустимого момента, не будут выполняться требования для перевозки людей, может быть нанесен вред здоровью. Если ПТМ не развивают требуемого момента, возможна ситуация застревания кабины лифта или подъёмной клети между требуемыми точками останова, что также рассматривается как аварийная ситуация. При серийном производстве систем ПТМ на этапе экспериментальной проверки показателей функционирования возникает задача проведения сложных нагрузочных испытаний. В данном режиме выполняется проверка ПТМ на соответствие требованиям по ограничению и формированию выходного момента. При этом испытательное нагрузочное устройство должно имитировать диаграмму эксплуатационных усилий, прикладываемых со стороны элементов ПТМ различных типов.
Для создания нагрузочного усилия самым простым решением является применение механического тормозного устройства в виде барабана и колодок. К основным недостаткам следует отнести сложность стабилизации тормозного момента, шум, повышенную вибрацию и т.д. Кроме того, при использовании нагрузочного испытательного оборудования данной конструкции точность результатов испытаний во многом определяется навыками и опытом оператора, который вручную управляет тормозным механизмом. Нагрузочное усилие можно получить применением генераторов и двигателей постоянного тока с различными типами силовых преобразователей и систем управления.
Известно такое изобретение, как СТАНЦИЯ ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
Дата начала отсчета срока действия патента: 10.03.2006
Патентообладатель:
ГОУ ВПО Дальневосточный государственный университет путей сообщения МПС России (ДВГУПС) (RU)
Изобретение относится к области электротехники и может быть использовано в тяговых электродвигателях электроподвижного состава. Технический результат заключается в повышении энергетических показателей за счет повышения значения коэффициента мощности путем улучшения формы сетевого тока и приближения его фазы к сетевому напряжению при существенном снижении энергопотребления.
Известно такое изобретение, как УСТРОЙСТВО ДЛЯ КОНТРОЛЬНОГО ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКОГО ПРИВОДА
Дата начала отсчета срока действия патента: 29.10.2008
Патентообладатель:
ФРАМАТОМ АНП ГмбХ (DE)
Изобретение относится к электротехнике и может быть использовано для контрольного испытания электрического привода и/или приданного приводу механического устройства, которое является, в частности, арматурой или исполнительным органом. Техническим результатом является обеспечение автономности работы от центрального блока измерения при контрольных испытаниях и относительно малой мощности энергоснабжения.
Известно такое изобретение, как УСТРОЙСТВО ДЛЯ КОНТРОЛЬНОГО ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКОГО ПРИВОДА
Заявка: 94019968/28, 12.10.2005
Патентообладатель(и):
Сименс АГ (DE)
Изобретение относится к устройству для контрольного испытания электрического привода, предпочтительно, привода арматуры, содержащему измерительный и анализирующий блок, съемный блок распределительного устройства, через который проведены электрические линии питания привода и на котором расположены отводы для измерительного и анализирующего блока.
На фоне известных недостатков коллекторных машин постоянного тока с интересом рассматривается идея об использовании в качестве испытательного нагрузочного устройства асинхронного ЭП на базе ПЧ с векторным управлением.
Целью данной работы является разработка системы управления нагрузочным асинхронным ЭП испытательного стенда для проверки ПТМ с возможностью имитации нагрузочных усилий со стороны элементов ПТМ различных типов.
Для достижения поставленной задачи необходимо решить следующие задачи:
1. Проанализировать особенности режимов работы подъемно-транспортных механизмов и выделить требования к нагрузочному моментному ЭП испытательного стенда.
2. Разработать математическое описание и динамические имитационные модели компонентов нагрузочного асинхронного ЭП и элементов подъемно-транспортных механизмов.
3. Разработать методику определения структуры и параметров для системы управления нагрузочным асинхронным ЭП испытательного стенда.
4. Реализовать микропроцессорное управление нагрузочным асинхронным ЭП испытательного стенда и провести экспериментальное исследование его работоспособности.
Перечисленные в данной работе задачи будут решаться методами теории электрических машин, теории автоматического управления, численного моделирования и экспериментальных исследований в лабораторных условиях.
Похожие работы
... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
... большей стабильности платформы может быть установлено два варианта стабилизатора: система блокировки подвески и опускающийся на землю позади машины стабилизатор. По сравнения с обычными 120-мм минометными системами, «SRAMS» обладает рядом характеристик, позволяющих увеличить ее скорострельность. В том числе установлена полуавтоматическая система подачи снарядов и запатентованный клапан зарядного ...
... . Большой вклад в развитие таких электроприводов вносят коллективы институтов Тяжпромэлектропроект, Укртяжпромэлектропроект и др. 2 Теории и практики автоматизированного электропривода Электрический привод обеспечивает все отрасли народного хозяйства механической энергией, полученной из электрической, осуществляет практически все технологические операции, связанные с механическим движением, во ...

... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...
0 комментариев