Навигация
ВЫБОР И РАСЧЕТ ПАРАМЕТРОВ ЗОНДИРУЮЩИГО СИГНАЛА
18443
знака
3
таблицы
7
изображений
2. ВЫБОР И РАСЧЕТ ПАРАМЕТРОВ ЗОНДИРУЮЩИГО СИГНАЛА
После оптимизации мы получили базу сигнала равную В = 8. Из-за того, что база сигнала больше единицы возникает противоречие между максимальной дальностью и разрешающей способности по дальности. При использовании простого сигнала это противоречие невозможно обойти, однако использование сложных сигналов позволяет обеспечить требуемые параметры. Наиболее известными сложными сигналами являются фазоманипулированные сигналы (ФМ) и сигналы с линейной частотной модуляцией (ЛЧМ). Из курса лекций М.Б.Свердлика и А.Н.Мелешкевича известно, что при базе сигнала меньше 20 предпочтительней использовать ФМ сигнал.
Аналитическое описание фазоманипулированного сигнала имеет вид:
![]() , (2.1)
, (2.1)
где 
Свойство фазоманипулированных сигналов при заданных М и Т0 полностью описываются кодовой последовательностью:
![]() (2.2)
(2.2)
Среди фазоманипулированных сигналов наибольшее распространение получили бифазные сигналы ![]() , которые строятся на базе кодовых последовательностей максимальной длины (КМД) или М-последовательностей
, которые строятся на базе кодовых последовательностей максимальной длины (КМД) или М-последовательностей ![]() . Между значениями Ym и значениями Xm М-последовательности, имеется однозначное соответствие:
. Между значениями Ym и значениями Xm М-последовательности, имеется однозначное соответствие:
![]()
Рассмотрим ФМ сигнал для нашей РЛС.
![]() ГГц
ГГц
![]() мкс
мкс
М-последовательность является переодической с периодом ![]() , который должен быть не меньше базы сигнала. Таким образом В = 7.51 @ 8, и следовательно, М ³ 8. При m = 4 получим М = 15, где m – степень порождающего полинома М-последовательности.
, который должен быть не меньше базы сигнала. Таким образом В = 7.51 @ 8, и следовательно, М ³ 8. При m = 4 получим М = 15, где m – степень порождающего полинома М-последовательности.
Сгенерируем М-последовательность с минимальным уровнем боковых лепестков функции автокорреляции. Величина боковых лепестков зависит от вида порождающего полинома и от начальной комбинации. Воспользуемся таблицами, приведенными в методических указаниях [4].
![]() (2.3)
(2.3)
Согласно этому полиному (2.3) и для начальной комбинации 1000, построим структурную схему генератора ФМ сигнала:
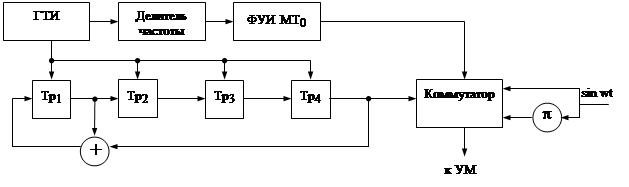
Рис.2.1 Структурная схема генератора ФМ сигнала
Построим М-последовательность, реализованную схемой изображенной на рис.2.1. Результаты сведем в табл.2.1.
Таблица 2.1
| Х4 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 |
| Х3 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 |
| Х2 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 0 |
| Х1 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 |
| Х0 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
| 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 | |
| 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 0 | 1 |
| 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 1 | |
| 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | ||
| 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | |||
| 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 0 | 1 | ||||
| 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | |||||
| 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | ||||||
| 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | |||||||
| 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | ||||||||
| 1 | 0 | 0 | 0 | 1 | 1 | 1 | |||||||||
| 1 | 0 | 0 | 0 | 1 | 1 | ||||||||||
| 1 | 0 | 0 | 0 | 1 | |||||||||||
| 0 | 1 | 1 | 1 | ||||||||||||
| 0 | 1 | 1 | |||||||||||||
| 0 | 1 | ||||||||||||||
| 1 | 0 | 1 | 2 | 1 | 2 | 1 | 0 | 1 | 0 | 3 | 2 | 1 | 0 | 15 |
Рис. 2.2 Построение огибающей ФМ сигнала на выходе согласованного фильтра
Схема, изображенная на рис.2.1 работает следующим образом. Генератор тактовых импульсов ГТИ вырабатывает тактовые импульсы с периодом Т0. Делитель частоты делит частоту тактового импульса до частоты повторения зондирующего сигнала. Формирователь управляющих импульсов длительностью МТ0 (ФУИ МТ0) синхронизируется сигналами с выхода делителя частоты (а также с блока синхронизации нестабильности линии задержки ЧПК) и формирует импульсы длительностью МТ0. Эти импульсы включают коммутатор, подключенный к генератору гармонического колебания. В зависимости от кода М-последовательности (0 или 1) на выходе коммутатора получаем гармоническое колебание со сдвигом фазы 0 или p соответственно.
Рассмотрим автокорреляционную функцию полученного сигнала, которая будет соответствовать комплексной огибающей на выходе согласованного фильтра.
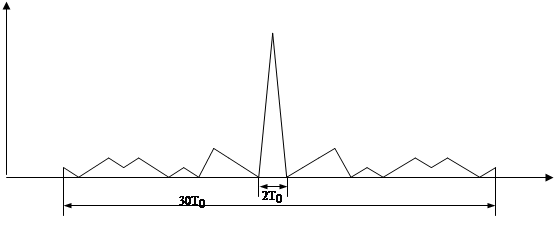
Рис. 2.3 Результирующая огибающая сигнала на выходе согласованного фильтра
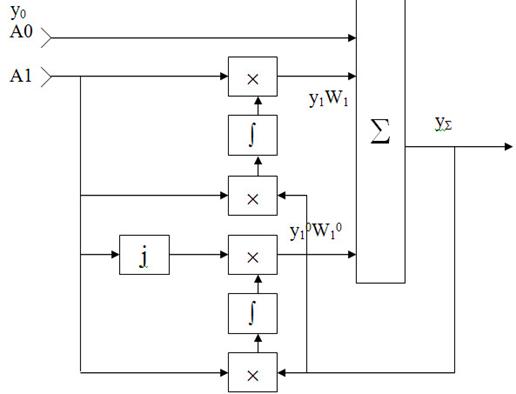
Структурная схема фильтра согласованного с ФМ сигналом, описанным кодовой последовательностью
![]() ,
,
изображена в приложении 2.
Похожие работы
... снизить вероятность возникновения пожаров на данном объекте. ЗАКЛЮЧЕНИЕ С целью обеспечения безопасности движения речного транспорта в камере шлюза Усть-Каменогорской гидроэлектростанции в данном дипломном проекте была разработана радиолокационная станция обнаружения надводных целей, она гораздо эффективнее, чем, например система видео наблюдения. Были рассчитаны основные тактико- ...
... техническому совершенству, боевым и эксплуатационным качествам не уступали лучшим зарубежным образцам, а нередко и превосходили их. Большинство из созданных в эти годы образцов в большей или меньшей степени представляли собой высокоточное оружие. В них использовались высокоточные инерциальные системы, системы коррекции и телеуправления движением на траектории и системы самонаведения на конечном ...

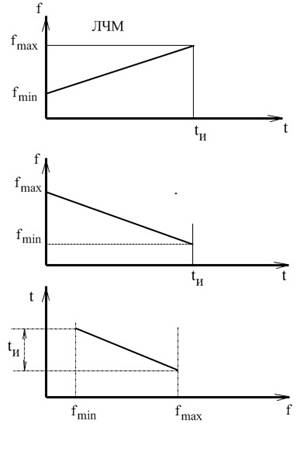
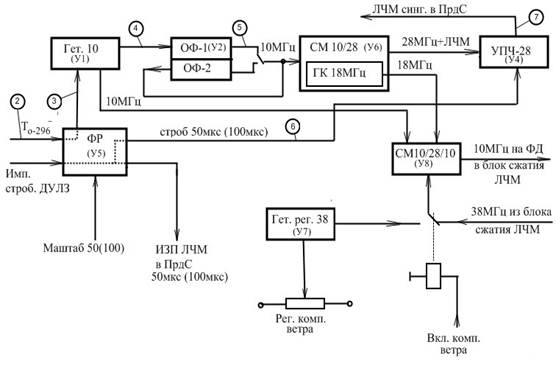
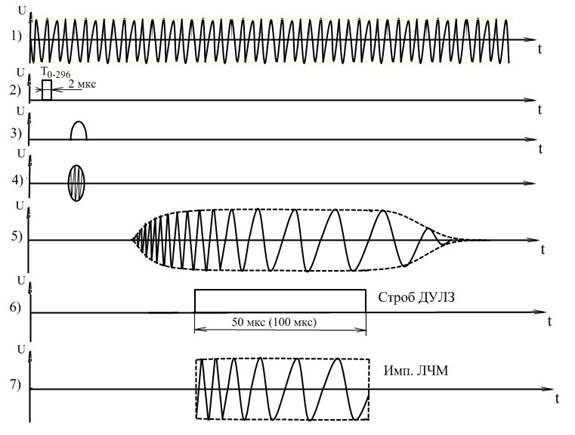
... КНИ явления слепой скорости и неоднозначности по дальности, для устранения которых понадобилось изменить общепринятую схему построения приемника сопровождения по дальности, а также задействовать ЦВС для решения ряда задач. Важное техническое решение было найдено, при проектировании приемной системы, в использовании одних и тех же узлов и элементов системы синхронизации для работы РЛС в режиме ЛЧМ ...
... параметры обнаружения. Поскольку принимаемая пачка из N импульсов является когерентной, то . 2. Расчет параметров помехопостановщика 2.1 Расчет мощности передатчика заградительной и прицельной помех помеха помехозащита радиолокационная станция Можно выделить несколько основных типов передатчиков заградительных помех: прямошумовые передатчики; передатчики помех, использующие мощный ...
0 комментариев