Министерство общего и профессионального образования
Вологодский политехнический институт
Кафедра: АТПП
Дисциплина: ССУ Курсовой проектСинтезирование управляющего автомата.
Выполнил: студент
группы ВЭМ - 51
Сенченко В.В.
Принял: Львов Ю.В.
Вологда 1998
Задание: 1. Синтезировать управляющий автомат Мили по заданной графической схеме алгоритма Рис.1.2. Синтезировать микропрограмный автомат по заданной граф схеме Рис.1.
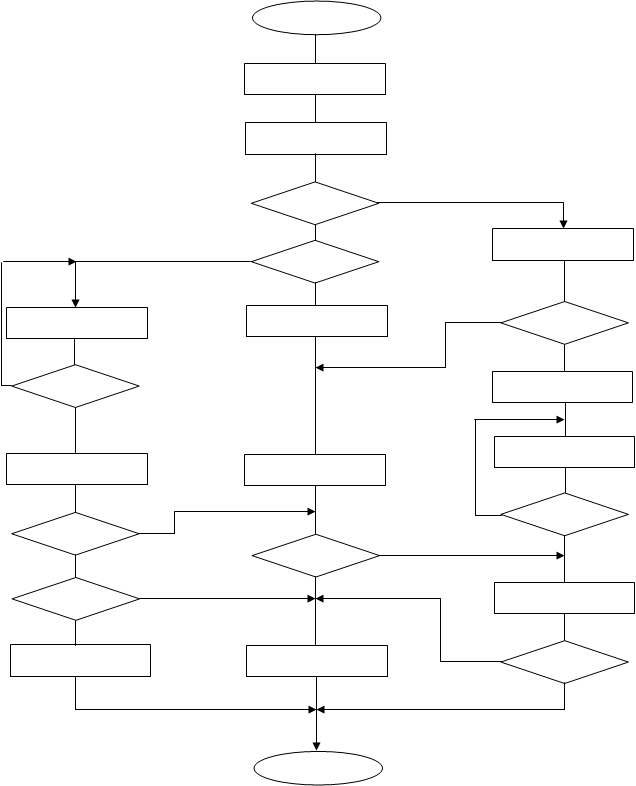
Начало
Y2
Y2,Y31
X10
1 Y4 X20
1
Y1,T Y2,Y3,Y4 X3
0
0
X5 Y4,Y6
1
Y6,T
T Y3
0
1 X6
X1 1 1
0 X4
1 0
X3 Y2,Y3
0
1
Y5 Y6 X2
0
Конец
Автомат Мили.
1.Разметка ГСА.
Разметка производится для выявления числа состояний автомата.
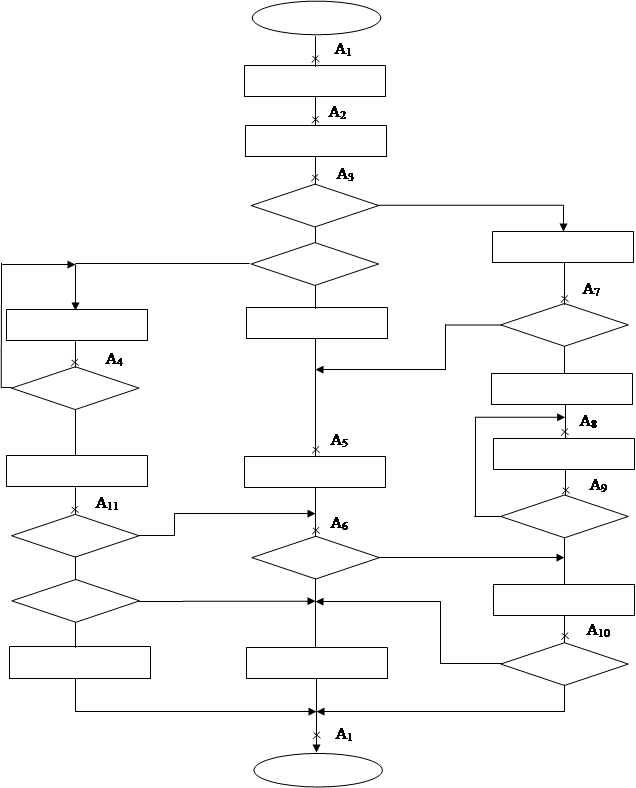
Начало
Y2
Y2,Y31
X10
1 Y4 X20
1
Y1,T Y2,Y3,Y4 X3
0
0
X5 Y4,Y6
1
Y6,T
T Y3
0
1 X6
X1 1 1
0 X4
1 0
X3 Y2,Y3
0
1
Y5 Y6 X2
0
Конец
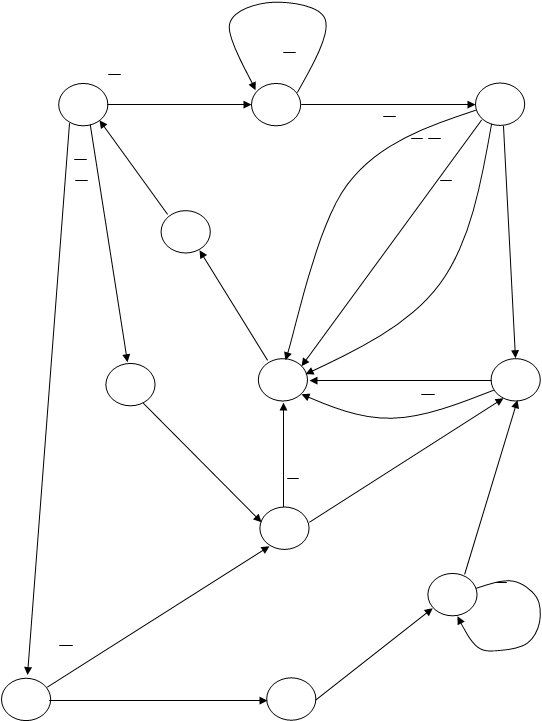
2.Граф автомата.
Y1T X5
X1X2 Y1T X5 T
A3 A4 A11
X1 Y2Y3 X1X4
X1X3 X1X4
X1
X2 X1X3
1
A2
Y2
Y2Y3Y4 Y6 Y5 Y6 Y2Y3
1 Y6 X2
A5 A1 A10
X2
1 Y6 (-) Y2Y3
Y2Y3
X4
Y3
A6 X4
Y3 X6
A9 X6
Y6T Y6T
Y4 X3
X3 Y4Y6 1
A7 A8
Граф автомата составляется по ГСА для лучшего восприятия и составления по нему структурной таблицы переходов.
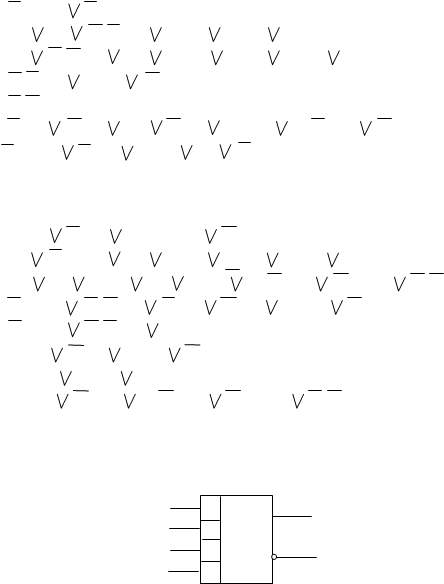
3.Структурный автомат Мили.
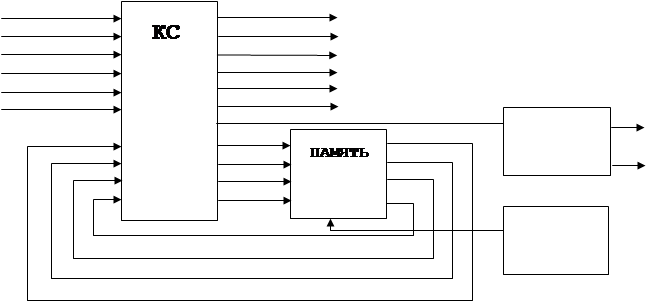 X1 Y1
X1 Y1
X2 Y2
X3 Y3
X4 Y4
X5 Y5
X6 Y6
T X5
T0 D0 T0 ТАЙМЕР
T1 D1 T1 X6
T2 D2 T2
T3 D3 T3
ГТИ
Структурная схема автомата мили приводится для составления канонической схемы.
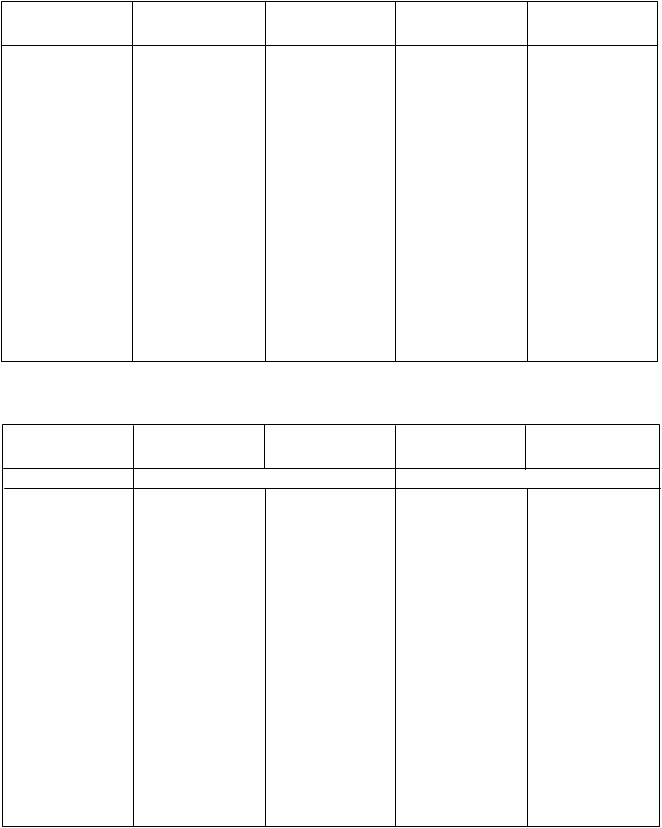
4.Структурная таблица переходов.
| Исходное состоя-ние | Состоя-ние перехода | Условие перехода | Выходные сигналы | Код исходно-го состоя-ния | Код перехода | Функция возбуж-дения памяти |
| A1 | A2 | 1 | Y2 | 0001 | 0010 | J1K0 |
| A2 | A3 | 1 | Y2Y3 | 0010 | 0011 | J1 |
| A3 | A4 | X1X2 | Y1T | 0011 | 0100 | J2K1K0 |
| A5 | X1X2 | Y2Y3Y4 | 0101 | J2K1 | ||
| A7 | X1 | Y4 | 0111 | J2 | ||
| A4 | A4 | X5 | Y1T | 0100 | 0100 | - |
| A11 | X5 | T | 1011 | J3K2J1J0 | ||
| A5 | A6 | 1 | Y3 | 0101 | 0110 | J1K0 |
| A6 | A1 | X4 | Y6 | 0110 | 0001 | K2K1J0 |
| A10 | X4 | Y2Y3 | 1010 | J3K2 | ||
| A7 | A6 | X3 | Y3 | 0111 | 0110 | K0 |
| A8 | X3 | Y4Y6 | 1000 | J3K2K1K0 | ||
| A8 | A9 | 1 | Y6T | 1000 | 1001 | J0 |
| A9 | A9 | X6 | Y6T | 1001 | 1001 | - |
| A10 | X6 | Y2Y3 | 1010 | J1K0 | ||
| A10 | A1 | X2 | Y6 | 1010 | 0001 | K3K1J0 |
| A1 | X2 | - | 0001 | K3K1J0 | ||
| A11 | A1 | X1X4 | Y6 | 1011 | 0001 | K3J1 |
| A1 | X1X3 | Y6 | 0001 | K3J1 | ||
| A1 | X1X3 | Y5 | 0001 | K3J1 | ||
| A10 | X1X4 | Y2Y3 | 1010 | K0 |
5.Стуктурные формулы.
Структурные формулы выходных сигналов и функции возбуждения памяти получаем из структурной таблицы переходов.
5.1.Структурные формулы для выходных сигналов.
 Y1=X1X2A3
X5A4
Y1=X1X2A3
X5A4
Y2=A1 A2 X1X2A3 X4A6 X6A9 X1X4A11
Y3=A2 X1X2A3 A5 X4A6 X3A7 X6A9 X1X4A11
Y4=X1X2A3 X1A3 X3A3
Y5=X1X3A11
Y6=X4A6 X3A7 A8 X6A9 X2A10 X1X4A11 X1X3A11
T=X1X2A3 X5A4 X5A4 A8 X6A9
5.2.Структурные формулы для функции возбуждения памяти.
J0=X5A4 X4A6 A8 X2A10 X2A10
K0=A1 X1X2A3 A5 X3A7 X3A7 X6A9 X1X4A11
J1=A1 A2 X5A4 A5 X6A9 X1X4A11 X1X3A4 X1X3A11
K1=X1X2A3 X1X2A3 X4A6 X3A7 X2A10 X2A10
J2=X1X2A3 X1X2A3 X1A3
K2=X5A4 X4A6 X4A6 X3A7
J3= X5A4 X4A6 X3A7
K3=X2A10 X2A10 X1X4A11 X1X3A11 X1X3A11
6.Тип Используемого триггера.
J T
С
К
R
Тригер выбирается из того, что в данном задании не реализованно противогоночное кодирование, поэтому я использую JK тригер т.к. он включает в себя 2 тригера и тем самым препятствует гонкам автомата.
7.Каноническая схема.
По структурным формулам составляем каноническую схему автомата.
Для уменьшения числа используемых элементов я применил дешифратор(см. приложение 1).
8.Принципиальная схема.
Принципиальная схема составляется при более детальном рассмотрении канонической схемы.(см. приложение 2).
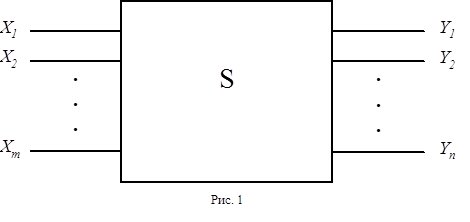
Микропограмный автомат.
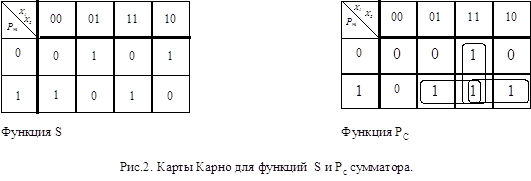
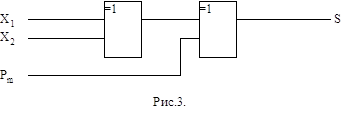
1.Совместимость микроопераций.
Составим матрицу микроопераций:
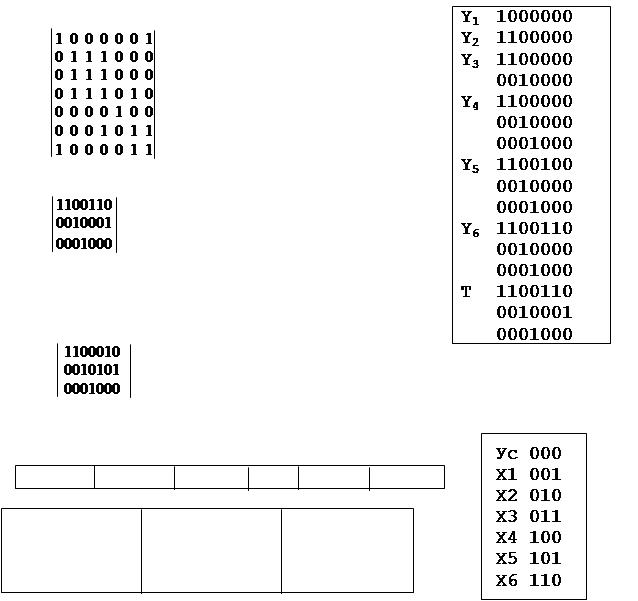
S =
Составим матрицу включения:
R =
Для уменьшения разрядности
получим:
R’=
Получаем слово:
Ус 3п 2п 1п А2 А1
| 1 поле | 00 | 2 поле | 00 | 3 поле | 0 |
| Y1 | 01 | Y3 | 01 | Y4 | 1 |
| Y2 | 10 | Y5 | 10 | ||
| Y6 | 11 | T | 11 |
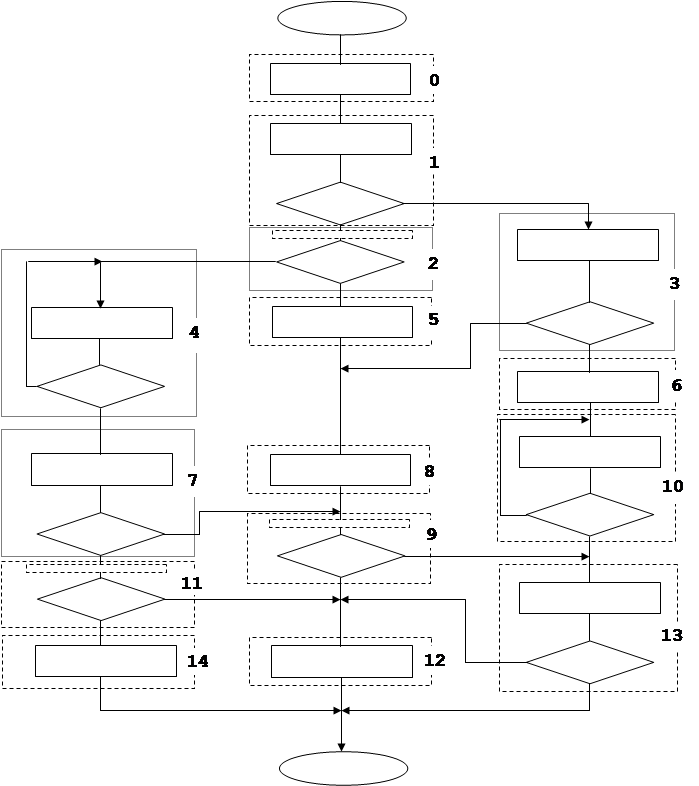
2.Разметка ГСА.
Разметка производится для выявления числа микрокоманд в микропрограмном автомате.
Начало
Y2
Y2,Y31
X10
1 Y4 X20
1
Y1,T Y2,Y3,Y4 X3
0
0
X5 Y4,Y6
1
Y6,T
T Y3
0
1 X6
X1 1 1
0 X4
1 0
X3 Y2,Y3
0
1
Y5 Y6 X2
0
Конец
3.Таблицы МПА.
3.1.Таблица переходов.
Таблица переходов составляется по размеченному ГСА.
| Адрес МК | ОЧ МК | Поле условий | А1(0) | А2(1) |
| 0 | y2 | - | 1 | 1 |
| 1 | Y2,Y3 | X1 | 2 | 3 |
| 2 | - | X2 | 5 | 4 |
| 3 | Y4 | X3 | 6 | 8 |
| 4 | Y1,T | X5 | 4 | 7 |
| 5 | Y2,Y3,Y4 | - | 8 | 8 |
| 6 | Y4,Y6 | - | 10 | 10 |
| 7 | T | X1 | 11 | 9 |
| 8 | Y3 | - | 9 | 9 |
| 9 | - | X4 | 12 | 13 |
| 10 | Y6,T | X6 | 10 | 13 |
| 11 | - | X3 | 14 | 12 |
| 12 | Y6 | - | 0 | 0 |
| 13 | Y2,Y3 | X2 | 0 | 12 |
| 14 | Y5 | - | 0 | 0 |
3.2.Таблица кодирования.
| Адрес МК | ОЧ МК | Поле условий | А1(0) | А2(1) |
| Биты ПЗУ 1 | Биты ПЗУ 2 | |||
| 01234 | 765 | 3210 | 7654 | |
| 0000 | 10000 | 000 | 0001 | 0001 |
| 0001 | 10010 | 001 | 0010 | 0011 |
| 0010 | 00000 | 010 | 0101 | 0100 |
| 0011 | 00001 | 011 | 0110 | 1000 |
| 0100 | 01110 | 101 | 0100 | 0111 |
| 0101 | 10011 | 000 | 1000 | 1000 |
| 0110 | 11001 | 000 | 1010 | 1010 |
| 0111 | 11000 | 001 | 1011 | 1001 |
| 1000 | 00010 | 000 | 1001 | 1001 |
| 1001 | 00000 | 100 | 1100 | 1101 |
| 1010 | 11110 | 110 | 1010 | 1101 |
| 1011 | 00000 | 011 | 1110 | 1100 |
| 1100 | 11000 | 000 | 0000 | 0000 |
| 1101 | 10010 | 010 | 0000 | 1100 |
| 1110 | 00100 | 000 | 0000 | 0000 |
3.3.Таблица программирования ПЗУ.
Эта таблица создается для пограммирования ПЗУ на програматоре.
|
ПЗУ Hex | Данные 1й ПЗУ hex | Данные 2й ПЗУ hex |
| 0 | 11 | 01 |
| 1 | 23 | 29 |
| 2 | 54 | 40 |
| 3 | 68 | 70 |
| 4 | 47 | A7 |
| 5 | 88 | 19 |
| 6 | 99 | 13 |
| 7 | B9 | 23 |
| 8 | 99 | 08 |
| 9 | CD | 80 |
| A | AD | CF |
| B | EC | 60 |
| C | 00 | 03 |
| D | 0C | 49 |
| E | 00 | 04 |
 Адрес
Адрес4.Приципиальная схема МПА.
Принципиальная схема МПА составляется по таблице переходов (См. приложение 3).
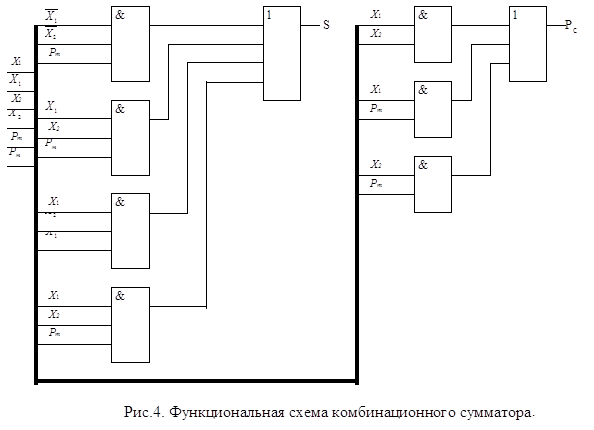
Вывод: В результате выполнения курсовой работы я, по заданному преподователем алгоритму, получил принципиальную схему автомата Мили и принципильную схему микропрограмного автомата.
Похожие работы
... покажет уровень полученных нами знаний по курсу «Прикладная теория цифровых автоматов». Задание Выполнить синтез управляющего автомата операции умножения младшими разрядами вперед со сдвигом множимого над числами в форме с фиксированной точкой в формате {1,8}в прямом коде двоичной системы счисления. Разработать микропрограмму и выполнить синтез управляющего автомата используя синхронный ...
... состоянии am. Рассмотренные выше абстрактные автоматы можно разделить на: 1) полностью определенные и частичные; 2) детерминированные и вероятностные; 3) синхронные и асинхронные; Полностью определенным называется абстрактный цифровой автомат, у которого функция переходов и функция выходов определены для всех пар ( ai, zj). Частичным называется абстрактный автомат, у которого функция ...
... если Да то на E07(Л2), иначе на C04(Л2). E07(Л2) Выводим частное, т.е. Z:=Рг.В. F07(Л2) Конец. 1.6 Описание моделирующей программы (Приложение В) Программа операции деления без восстановления остатка со сдвигом остатка с фиксированной точкой в коде 8421, 8421+6 выполнена на языке программирования ассемблера. В моделирующей программе регистрами Рг.А, Рг.В, Рг.К, а так же ...
... автоматически отвечать на слабые информационные воздействия, довольно мощными обратимыми конформационными изменениями, используется клеткой практически для всех биологических функций. 4. Ферменты и белки – это молекулярные биологические автоматы с программным управлением. В живой клетке имеется множество локально рассредоточенных объектов управления (субстратов). Для эффективного управления ими ...
0 комментариев