Министерство образования и науки Украины
Севастопольский национальный технический университет
Кафедра АТПП
Пояснительная записка к курсовому проекту
по дисциплине:
"Проектирование автоматизированных производственных систем"
на тему:
"Автоматизированная линия по изготовлению деталей типа "Вал-шестерня""
Выполнил: ст. гр. АКТ-51д
Крюков А.С.
Проверил: Круговой А.Н.
Севастополь 2006 г.
Содержание
Введение
1. Общий раздел
1.1 Описание конструкции и работы изделия
1.2 Описание служебного назначения детали
1.3 Направления, принятые при проектировании
2. Технологический раздел
2.1 Определение типа производства
2.2 Выбор способа получения заготовки
2.3 Проектирование технологических операций
2.3.1 Проектирование операции 010 фрезерно-центровальной
2.3.2 Расчет режимов резания
2.3.3 Техническое нормирование операции
2.3.4 Проектирование операции 015 токарной с ЧПУ
2.3.5 Техническая характеристика станка
2.3.6 Расчет режимов резания
2.3.7 Техническое нормирование операции
2.3.8 Проектирование операции 025 зубофрезерной
2.3.9 Техническая характеристика станка мод.5к328а
2.3.10 Расчёт режимов резания
2.3.11 Нормирование основного времени
3. Конструкторский раздел
3.1 Анализ и выбор компановки
3.2 Выбор оборудования
3.2.1 Выбор модели промышленного робота
3.2.2 Выбор транспортно-накопительных и загрузочных устройств
3.3 Расчёт ЗУ промышленного робота
4. Разработка системы управления
4.1 Разработка электрической системы управления
4.2 Программирование контроллеров FEC COMPACT
Заключение
Библиографический список
Приложение
Введение
Эффективность производства, технический процесс, качество выпускаемой продукции во многом определяется развитием производства, технологических процессов, нового оборудования, оснастки, инструмента, средств механизации и автоматизации.
Темпы развития машиностроения качественный и количественный состав станочного парка во многом определяют промышленный потенциал страны и характеризуют уровень ее машиностроения.
В настоящее время создалось крайне нестабильное и неблагоприятное положение для производства. Основная причина - кризис, связанный с разрывом экономических связей с бывшими республиками СССР, большими налогами, которые не позволяют развивать и расширять производство, а также препятствуют внедрению новых технологий.
Для выхода из кризиса Украины необходимо техническое перевооружение производства, качественное изменение его структуры и организации; необходима комплексная механизация и автоматизация технологических процессов механической обработки, сборки и вспомогательных операций; повышение степени оснащенности операций и снижения доли ручного труда, широкому внедрению программного управления и проектирования (САПР), создание роботизированных систем и производств, внедрению в производство вычислительной техники, повышению точности и надежности продукции.
Основными задачами при проектировании курсового проекта является - разработка и совершенствование технологических процессов механической обработки деталей.
1. Общий раздел 1.1 Описание конструкции и работы изделия
В курсовом проекте для проектирования технологического процесса выбрана деталь "вал-шестерня" двухступенчатого редуктора ЦД-650, который используется для передачи крутящего момента в механизме передвижения толкателя. Вал-шестерня редуктора представляет собой деталь сложной формы. Необходимо обратить особое внимание на смазку всех частей деталей с повышенным трением.
1.2 Описание служебного назначения деталиЗаданная деталь - вал шестерня - длиной 730 мм. Относится к классу валов. Масса детали m=22 кг. Деталь входит в узел редуктора ЦД-650. Назначение детали: передача вращающих моментов. Деталь изготовлена из легированной стали 40Х.
Деталь работает на изгиб и кручение.
1.3 Направления, принятые при проектированииПри проектировании процесса изготовления заданной детали необходимо выбрать наиболее экономичный путь, при этом производство желательно сделать малоотходным или безотходным.
Разработка технологического процесса, в соответствии с ГОСТ 14.301-83. включает: классификацию изготовляемого изделия на основании технологического классификатора; выбор технологических баз; составление технологического маршрута обработки; разработку технологических операций; нормирование операций; определение требований охраны труда; расчет точности, производительности и экономической эффективности вариантов технологического процесса, оформление технологических документов.
2. Технологический раздел 2.1 Определение типа производства
В связи с отсутствием базового технологического процесса тип производства определяем ориентировочно для N=100 шт. в год можно принять как мелкосерийное Оптимальное количество деталей в партии запуска:
![]()
периодичность запуска а = 12 дней;
количество рабочих дней F= 253.
Принимаем количество деталей в партии n = 5 (деталей).
2.2 Выбор способа получения заготовкиДанная деталь относится к классу "валов". Для изготовления данной детали можно принять следующие два варианта заготовок:
горячекатаный прокат обычной точности круглого сечения;
штамповка, получаемая на прессе.

Вариант 1
![]()
Вариант 2
Рисунок 1. Возможные варианты заготовок.
Обоснование более экономичного варианта заготовки производим по коэффициенту использования материала (КИМ) и по сравнению стоимости вариантов заготовки (Сзаг).
![]()
Определение стоимости заготовки:
для проката:
![]()
Определение стоимости заготовки:
![]() ,
,
где Ср - стоимость резки;
![]()
для штамповки:
Масса заготовки:
![]()
![]()
![]() ,
,
где К1, К2, К3, К4 - коэффициенты серийности, массы материала, сложности заготовки.
![]()
Таблица 1. Сравнительная характеристика.
| Вид заготовки | КИМ | Стоимость заготовки, грн. |
| Горячекатаный прокат Штамповка | 0,497 0,597 | 133,45 275,4 |
Исходя из сопоставления коэффициентов использования материала и стоимости, делаем вывод: более экономичным вариантом является заготовка, получаемая из проката Ø95×800 (ГОСТ 7324-85).
2.3 Проектирование технологических операций 2.3.1 Проектирование операции 010 фрезерно-центровальнойСодержание операции:
Установка А.
Переход 1. Фрезеровать торцы заготовки;
Переход 2. Сверлить центровочные отверстия.
Оборудование: станок фрезерно-центровальный мод. 2982.
ТЕХНИЧЕСКАЯ ХАРАКТЕРИСТИКА СТАНКА
Диаметр обрабатываемой заготовки, мм 25... 200
Длина обрабатываемой заготовки, мм 250...1000
Число скоростей шпинделя фрезы 6
Частота вращения шпинделя фрезы, мин-1 215... .1700
Наибольший ход головки фрезы, мм 200
Рабочая подача фрезы (бесступенчатое регулирование), мм/мин 20...400
Число скоростей сверлильного шпинделя 6
Частота вращения сверлильного шпинделя, мин-1 290...2300
Конец фрезерного шпинделя по ГОСТ 836-72 50
Ход сверлильной головки, мм 125
Рабочая подача сверлильной головки (бесступенчатое регулирование), мм/мин 20...300
Продолжительность холостых ходов, мин 0,3
Мощность всех электродвигателей, кВт 27
Габариты станка, мм 400![]() 1450
1450
Категория ремонтной сложности 7
Приспособление: зажимные тиски
РИ: Фреза торцевая Ø100 Т15К6 ГОСТ 1092-85; Сверло центровочное 2 шт. Ø8 мм, материал
режущей части Р6М5, стойкость Т=30 мин.
ВИ: Оправка для фрезы - 2 шт., цанговый патрон для центровок - 2 шт.
ИИ: Штангенциркуль ШКЦ - Т - 150 - 0,02 ГОСТ 166-89
2.3.2 Расчет режимов резанияПереход 1: Расчет режимов резания:
Подача на зуб: sz= 0,3 (мм);
Подача на 1 оборот: s = 5,4 (мм/об);
Диаметр фрезы: D = 100 (мм);
Скорость резания:
 ;
;
Показатели степени: Cν= 332; q = 0.2; х = 0.1; у = 0.4; m = 0.2; u = 0.2; р = 0
Поправочный коэффициент:
![]() ;
;
Стойкость: Т = 60 (мин)
 ;
;
Частота вращения шпинделя:
![]() (об/мин); nст = 497 (об/мин);
(об/мин); nст = 497 (об/мин);
Действительная скорость резания:
![]() (м/мин);
(м/мин);
Сила резания:
 ;
;
Показатели степени: Ср = 825; q = 1.3; x =1,0; y = 0.75; u = 1,1; w = 0,2.
![]() (Н);
(Н);
Крутящий момент на шпинделе:
![]() (Н·м);
(Н·м);
Мощность резания:
![]() (кВт);
(кВт);
Переход 2:
Расчет режимов резания:
Скорость резания:
 ;
;
Поправочный коэффициент: ![]() ;
;
Показатели степени: Cv= 7,0; q = 0,4; y = 0,7; m = 0,2;
Стойкость: Т=15 (мин);
 ;
;
Частота вращения шпинделя:
![]() (об/мин);
(об/мин);
nст = 1000 (об/мин);
Действительная скорость резания:
![]() (м/мин);
(м/мин);
Крутящий момент:
![]() ;
;
Показатели степени: СМ = 0,04; q = 2; y = 0,8; Kp = 1;
![]() (Н·м);
(Н·м);
Мощность резания:
![]() (кВт).
(кВт).
Основное время:
![]() (мин);
(мин);
![]() (мин);
(мин);
Основное время на операцию:
![]() (мин);
(мин);
![]() ;
; ![]() ;
;
Твсп1 - вспомогательное время на установку и закрепление детали: Твсп1 = 0,9 (мин);
Твсп2 - вспомогательное время, связанное с переходом: Твсп2 = 0,3 (мин);
Твсп3 - вспомогательное время на измерение: Твсп3 = 0,25 (мин);
![]() (мин);
(мин);
Оперативное время:
![]() (мин);
(мин);
Тобс - время обслуживания рабочего места: Тобс = 8%Топ = 0,175 (мин);
Тп - время перерывов на собственные потребности: Тп = 7%Топ = 0,15 (мин);
![]() (мин);
(мин);
![]() (мин);
(мин);
 (мин).
(мин).
Содержание операции:
Установка А:
Переход 1:
Точить заготовку до Ø94-0,3 на длину L=571±0,7 мм; точить до Ø64-0,3 на длину L=228,5±0,46; точить до Ø62-0,3 на длину L=179±0,4; точить до Ø54-0,3 на длину L= 129.5±0,4;
Переход 2:
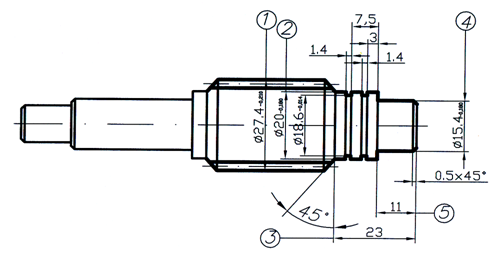
Точить заготовку до Ø91.93-0.22 на длину L=371.5±0,7 мм; точить до Ø61.6-0,22 на длину L=228,5±0,46; точить до Ø59,6-0,22 на длину L=179±0,4; точить до Ø51.6-0,22 на длину L=129.5±0,4; точить до Ø40-0,22 на длину L=35±0,4. Точить фаску 5×45°.
Переход 3:
Точить канавку шириной 5-0,13 до Ø49.5-0,74; точить канавку шириной 5-0,13 до Ø57.5-0,74; точить канавку шириной 5-0,13 до Ø59.5-0,74.
Переход 4:
Точить заготовку до Ø91.6-0.22 на длину L=57I,5±0,7 мм; точить до Ø60.6-0,22 на длину L=228,5±0,46 мм; точить до Ø58.6-0,22 на длину L=I79±0,4 мм; точить до Ø50.6-0,22 на длинуL=129.5±0,4 мм; Точить фаску 5x45°.
Установка Б:
Переход 1:
Точить заготовку до Ø64-0,3 на длину L=228,5±0,46 мм; точить до Ø62-0,3 на длину L=l 79±0,4 мм; точить до Ø54-0,3 на длину L=129.5±0,4 мм;
Переход 2:
Точить заготовку до Ø61.6-0,22 на длину L=228,5±0,46 мм; точить до Ø59.6-0,22 на длину L=179±0,4 мм; точить до Ø51.6-0,22 на длину L=129.5±0,4 мм; точить до
Ø40-0,22 на длину L=35±0,4 мм. Точить фаску 5x45°.
Переход 3:
Точить канавку шириной 5-0,13 до Ø49.5-0.74. Точить канавку шириной 5-0,13 до
Ø57.5-0,74; точить канавку шириной 5-0,13 до Ø59.5-0,74.
Переход 4:
Точить заготовку до Ø60.6-0,22 на длину L=228,5±0,46 мм; точить до Ø58.6-0,22 на длину L=179±0,4 мм; точить до Ø50.6-0,22 на длину L=129.5±0,4 мм; Точить фаску 5x45°.
Оборудование: станок токарно-винторезный с ЧПУ 16К20ФЗ.
2.3.5 Техническая характеристика станкаНаибольший диаметр обрабатываемой заготовки:
над станиной 400, над суппортом 220
Наибольший диаметр прутка проходящего через отверстие шпинделя 53
Наибольшая длина обрабатываемой заготовки 1000
Шаг нарезаемой резьбы:
метрической до 20
дюймовой, число ниток на дюйм - модульной, модуль - питчевой, питч - Частота вращения шпинделя, об/мин 12,5-2000
Число скоростей шпинделя 22
Наибольшее перемещение суппорта:
продольное 900, поперечное 250
Подача суппорта, мм/об:
продольная 3-1200, поперечная 1,5-600
Число ступеней подач Б/с
Скорость быстрого перемещение суппорта, мм/мин:
продольного 4800, поперечного 2400
Мощность электродвигателя главного привода, кВт 10
Габаритные размеры (без ЧПУ):
длина 3360
ширина 1710
высота 1750
Масса, кг 4000
Станок с ЧПУ мод.16К20ФЗ выполняют с двумя координатами по программе. Дискретность системы управления при задании размеров: продольных - 0,01 мм, поперечных - 0,005 мм.
РИ: Резец проходной ГОСТ 18879-73, резец проходной ТУ-2-035-892-82, резец фасонный;
ВИ: Резцедержатель ГОСТ 8854-85;
ИИ: Штангенциркуль, линейка, микрометр.
2.3.6 Расчет режимов резанияСкорость резания при точении:
![]() , где
, где
Сv - коэффициент, зависящий от обрабатываемого материала;
Т - стойкость инструмента;
t - глубина резания;
s - подача;
x, y, m - показатели степени;
К1 - коэффициент, учитывающий влияние материала заготовки, состояния поверхности и материал инструмента;
К2 - коэффициент, учитывающий состояние поверхности и материал инструмента;
К3 - коэффициент, учитывающий материал инструмента.
Установка А.
Переход 1.
t = 2 (мм), s = 0,6 (мм/об), T = 45 (мин).
V = (350/450,2×0,60,35×20,15) ×1×1×1= 178 (м/мин);
Частота вращения шпинделя:
![]() ;
;
Сила резания при точении:
P = 10×Cp×tx×sy×Vn×Kp,
где
Ср - постоянная; x, y, n - показатели степени;
Кр - поправочный коэффициент;
Р = 10×200×21,0×0,60,75×1780×1,1= 3000 (Н);
Мощность резания при точении:
![]() < 10;
< 10;
Переход 2.
t = 0,4 (мм), s = 0,4 (мм/об), T = 45 (мин).
V = (350/450,2×0,40,35×0,40,15) ×1×1×1= 258 (м/мин);
Частота вращения шпинделя:
![]() ;
;
Сила резания при точении:
P = 10×Cp×tx×sy×Vn×Kp;
Р = 10×200×0,41,0×0,40,75×2500×1,1= 443 (Н);
Мощность резания при точении:
![]() < 10;
< 10;
Переход 3.
t = 0,5 (мм), s = 0,25 (мм/об), T = 45 (мин).
V = (350/450,2×0,250,35×0,50,15) ×1×1×1= 300 (м/мин);
Частота вращения шпинделя:
![]() ;
;
Сила резания при точении:
P = 10×Cp×tx×sy×Vn×Kp;
Р = 10×200×0,251,0×0,50,75×3000×1,1= 297 (Н);
Мощность резания при точении:
![]() < 10;
< 10;
Переход 4.
t = 0,4 (мм), s = 0,4 (мм/об), T = 45 (мин).
V = (350/450,2×0,40,35×0,40,15) ×1×1×1= 258 (м/мин);
Частота вращения шпинделя:
![]() ;
;
Сила резания при точении:
P = 10×Cp×tx×sy×Vn×Kp;
Р = 10×200×0,41,0×0,40,75×2500×1,1= 443 (Н);
Мощность резания при точении:
![]() < 10;
< 10;
Установка Б. Переход 5.
t = 2 (мм), s = 0,6 (мм/об), T = 45 (мин).
V = (350/450,2×0,60,35×20,15) ×1×1×1= 178 (м/мин);
Частота вращения шпинделя:
![]() ;
;
Сила резания при точении:
P = 10×Cp×tx×sy×Vn×Kp,
Где Ср - постоянная;
x, y, n - показатели степени;
Кр - поправочный коэффициент;
Р = 10×200×21,0×0,60,75×1780×1,1= 3000 (Н);
Мощность резания при точении:
![]() < 10;
< 10;
Переход 6.
t = 0,4 (мм), s = 0,4 (мм/об), T = 45 (мин).
V = (350/450,2×0,40,35×0,40,15) ×1×1×1= 258 (м/мин);
Частота вращения шпинделя:
![]() ;
;
Сила резания при точении:
P = 10×Cp×tx×sy×Vn×Kp; Р = 10×200×0,41,0×0,40,75×2500×1,1= 443 (Н);
Мощность резания при точении:
![]() < 10;
< 10;
Переход 7.
t = 0,5 (мм), s = 0,25 (мм/об), T = 45 (мин).
V = (350/450,2×0,250,35×0,50,15) ×1×1×1= 300 (м/мин);
Частота вращения шпинделя:
![]() ;
;
Сила резания при точении:
P = 10×Cp×tx×sy×Vn×Kp; Р = 10×200×0,251,0×0,50,75×3000×1,1= 297 (Н);
Мощность резания при точении:
![]() < 10;
< 10;
Переход 8.
t = 0,4 (мм), s = 0,4 (мм/об), T = 45 (мин).
V = (350/450,2×0,40,35×0,40,15) ×1×1×1= 258 (м/мин);
Частота вращения шпинделя:
![]() ;
;
Сила резания при точении:
P = 10×Cp×tx×sy×Vn×Kp;
Р = 10×200×0,41,0×0,40,75×2500×1,1= 443 (Н);
Мощность резания при точении:
![]() < 10;
< 10;
Т01 = 2,6 (мин);
Т02 = 2,54 (мин);
Т03 = 0,033 (мин);
Т04 = 9,91 (мин);
Т05 = 1,26 (мин);
Т06 = 1,28 (мин);
Т07 = 0,033 (мин);
Т08 = 4,82 (мин).
![]()
Вспомогательное время на операцию: Тв = 5 (мин);
Оперативное время:
Топ = То+Тв = 22,4+5 = 27,4 (мин);
Тоб = 7%Топ = 1,8 (мин);
Тшт = То+Тв+Тоб = 22,4+5+1,8 = 29,2 (мин);
Тп. з. = 5 (мин);
![]() (мин).
(мин).
Содержание операции:
Фрезеровать зубья m = 3,5; z = 23.
Приспособление: специальное станочное.
Режущий инструмент: фреза червячная ГОСТ 9324-80.
Мерители: зубомер нц - 1, шагомер БВ - 5070.
Станок: 5К328А.
2.3.9 Техническая характеристика станка мод.5к328а
Наибольший диаметр обрабатываемой заготовки 1250
Наибольшие размеры нарезаемых колёс:
Модуль 12
Длина зуба прямозубых колёс 560
Угол наклона зубьев ± 60º
Наибольший диаметр устанавливаемых фрез 285
Расстояние:
От торца стола до оси фрезы 230 - 880
От оси инструмента до оси шпинделя заготовки 115 - 820
Наибольшее осевое перемещение фрезы 240
Частота вращения шпинделя инструмента, об/мин 32 - 200
Подача заготовки, мм/об:
Вертикальная или продольная 0,5 - 5,6, Радиальная 0,22 - 2,6
Мощность электродвигателя привода главного движения, кВт 10
Габаритные размеры, мм:
Длина 3580
Высота 2590
Ширина 1790
Масса станка с электрооборудованием, кг 14000
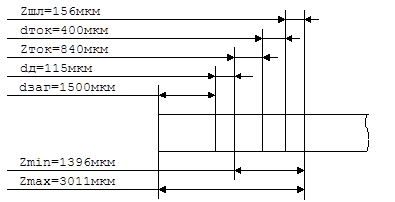
2.3.10 Расчёт режимов резанияЧерновое фрезерование:
Подача: S = 2 (мм/об);
Скорость резания: V = 37 (м/мин);
Поправочный коэффициент:
Кv = KVM ·KSM,
где
KVM = 1,KSM = 1.
t - глубина резания;
![]() (мм);
(мм);
Число оборотов шпинделя:
![]() (об/мин);
(об/мин);
Ближайшее имеющееся на станке число оборотов:
![]() (об/мин);
(об/мин);
При этом условии фактическая скорость резания составит:
![]() (м/мин);
(м/мин);
Сила резания при фрезеровании:
![]() ,
,
где
Ср - постоянная;
x, y, n - показатели степени;
Кр - поправочный коэффициент: Кр = 1.
![]() (Н);
(Н);
Крутящий момент:
![]() (Н·м);
(Н·м);
Мощность резания при фрезеровании:
![]() (кВт);
(кВт);
Чистовое фрезерование:
Подача: S = 2 (мм/об);
Скорость резания: V = 37 (м/мин);
Поправочный коэффициент:
Кv = KVM ·KSM,
где
KVM = 1,KSM = 1.
t - глубина резания:
![]() (мм);
(мм);
Число оборотов шпинделя:
![]() (об/мин);
(об/мин);
Ближайшее имеющееся на станке число оборотов:
![]() (об/мин);
(об/мин);
При этом условии фактическая скорость резания составит:
![]() (м/мин);
(м/мин);
Сила резания при фрезеровании:
 , где
, где
Ср - постоянная;
x, y, n - показатели степени;
Кр - поправочный коэффициент: Кр = 1.
![]() (Н);
(Н);
Крутящий момент:
![]() (Н·м);
(Н·м);
Мощность резания при фрезеровании:
![]() (кВт);
(кВт);
Мощность станка удовлетворяет условиям резания.
2.3.11 Нормирование основного времениLр. х. - длина рабочего хода: Lр. х. = 120 (мм);
Подача: Sz = 2 (мм/об);
Расчёт основного времени при последовательной обработке:
![]() ;
;
![]() (мин);
(мин);
![]() (мин);
(мин);
![]() (мин);
(мин);
![]() ;
;
![]() ;
;
![]() (мин);
(мин);
![]() (мин);
(мин);
![]() (мин).
(мин).
3. Конструкторский раздел 3.1 Анализ и выбор компановки
Для автоматизации массового и крупносерийного производства создаются гибкие автоматические линии (ГАЛ), в которых на стадии проектирования предусматриваются условия их эффективного использования (поточный метод изготовления продукции по схеме "станок-станок", высокая концентрация операций, высокопроизводительные режимы резания и т.д.). При этом уровень автоматизации переналадки оборудования существенно ниже, так как эта операция выполняется в производственных условиях значительно реже, чем в ГАУ.
Свойство гибкости в ГАЛ обеспечивается применением переналаживаемого оборудования и систем управления на базе УЧПУ, программируемых командоаппаратов (ПК), ЭВМ различных типов.
Варианты компоновок ГАЛ приведены ниже:
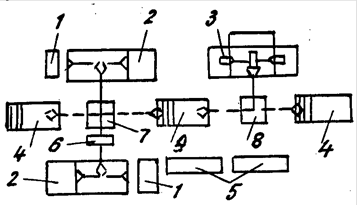
Рис.1 - Т - образная компоновка АЛ для обработки деталей типа тел вращения, где:
1 - УЧПУ станка;
2 - токарный станок;
3 - фрезерно-центровальный станок;
4 - механизм поштучной выдачи заготовок;
5 - система управления АЛ;
6 - контрольное устройство;
7, 8 - ПР;
9 - переукладчик.
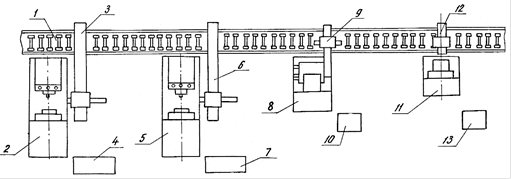
Рис.2 - Компоновка линии для обработки деталей типа "тел вращения", где
1 - конвейер;
2 - токарный станок с ЧПУ;
3 - манипулятор;
4 - пульт ЧПУ;
5 - токарный станок с ЧПУ;
6 - манипулятор;
7 - пульт управления;
8 - фрезерный агрегатный станок
10 - пульт управления;
11 - сверлильный агрегатный станок;
12 - манипулятор;
13 - пульт управления.
В данном курсовом проекте была разработана автоматизированная линия, показанная на рис.1, потому что в связи с большими значениями времени, затраченного на технологические операции, расположение технологического оборудования не сможет уменьшить производительность линии в целом.
3.2 Выбор оборудования 3.2.1 Выбор модели промышленного роботаГрузоподъемность должна превышать массу объекта манипулирования не менее чем на 10%.
Номинальная грузоподъемность определяется по формуле:
![]() ,
,
где mз - масса заготовки, кг;
Кзап - коэффициент запаса, зависящий от условия применения ПР и расположения других элементов промышленного оборудования.
![]()
Пользуясь каталогом промышленных роботов и учитывая вышеперечисленные требования, выбираем промышленный робот по его технологическим характеристикам.
Техническая характеристика ПР мод. L-2300:
Номинальная грузоподъемность, кг... ... ... ... ... ... ... ... ... ... ... ... ... ...68,1
Число степеней подвижности... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .5
Число рук/захватов на руку... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .1/1
Тип привода... ... ... . ... ... ... ... ... ... ... ... ... ... ... ... ... ... . пневматический
Устройство управления... ... ... ... ... ... ... ... ... ... ... ... ... ... ... Цикловое
Число программируемых координат ... ... ... ... ... ... ... ... ... ... ... ... ... ...5
Способ программирования
перемещений … … … … … … … … … … Обучение по первому циклу
Ёмкость памяти системы, число положений рабочего органа... ... ... ...60
Погрешность позиционирования, мм... ... ... ... ... ... ... ... ... ... ... ... . ±1,27
Максимальный радиус зоны обслуживания R, мм... ... ... ... ... ... ... .2134
Линейные перемещения со скоростью 0,914м/с, мм:
по оси Х... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ...762
по оси У... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .1067
Угловые перемещения со скоростью 90 град/сек;
Максимальное угловое перемещение, град……………………………270
3.2.2 Выбор транспортно-накопительных и загрузочных устройствИспользование лотков-скатов целесообразно, так как детали (заготовки) имеют цилиндрическую форму, обладают незначительной массой и относительно не большими размерами.
Расчет проходного сечения лотка сводится к определению зазора ∆, мм:
 ,
,
где l - длина заготовки, d - максимальный диаметр заготовки,
f - коэффициент трения.
Для расчета длинны лотка принимаем, что АЛ должна работать без дозагрузки лотка в течении 8-мичасовой рабочей смены. Время обработки одной детали на АЛ 30 (мин). Максимальный диаметр заготовки 96мм.
Такт обработки = 480/30 = 16 (шт/смена).
Таким образом, длинна лотка:
L = 16·96 = 1536 (мм);
Принимаем длину лотка L=1550 (мм).
3.3 Расчёт ЗУ промышленного роботаЗахватные устройства роботов осуществляют следующие функции: удерживают объект манипулирования во время его транспортировки; ориентирует объект манипулирования; базируют положение объекта манипулирования относительно системы координат манипулятора рабочей зоны оборудования.
В роботах широкое распространение получили захватные устройства (ЗУ) специального назначения, с помощью которых производят захват сравнительно небольшой номенклатуры объектов манипулирования.
Однако у современных роботов имеются устройства смены ЗУ в автоматическом режиме, что обеспечивает работу с достаточно разнообразными объектами манипулирования при относительной простоте и рациональной стоимости конструкции.
ЗУ удерживают объект манипулирования с помощью сил трения, возникающих при воздействии его элементов на объект манипулирования, фиксации объекта манипулирования по имеющимся на нем выступам, отверстиям, штифтам, пазам и другим поверхностям, которые могут быть использованы в качестве баз, а также электромагнитных сил и вакуума.
В большинстве случаев, для уменьшения усилий привода схватов применяют комбинацию кинематического, электромагнитного и вакуумного воздействия с одновременным использованием для фиксации базовых поверхностей объекта манипулирования.
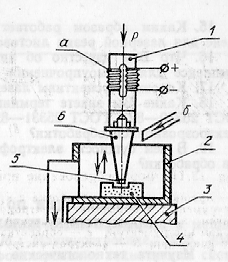
Определение усилия захвата.
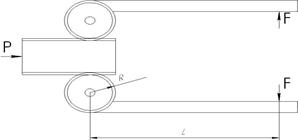
Рис.3. - конструктивная схема механического ЗУ.
Усилие захватывания определяют:
![]()
![]()
где m = 44 (кг) - масса объекта манипулирования;
a - максимальное ускорение центра масс объекта манипулирования, м/с2 (а=2...3g);
K1 - коэффициент, зависящий от положения заготовки по отношению к губкам ЗУ и направления действия силы тяжести; выбирают по табл.; К1 = ½;
K2=1,3...2,0 - коэффициент запаса; большие значения K2 берут для захватных устройств, в которых отсутствует самоторможение.
Усилие привода определяют из условия равенства элементарных работ, совершаемых приводом и губками ЗУ (рис.2.1).
![]() ,
,
Откуда
![]() ;
;
Величину ![]() называют передаточным отношением ЗУ. Его определяют исходя из кинематического анализа ЗУ:
называют передаточным отношением ЗУ. Его определяют исходя из кинематического анализа ЗУ:
![]() ;
;
Радиус зубчатого колеса определяется из расчета зубчато - реечной передачи на изгиб:
![]() ,
,
где z=17 - число зубьев;
![]() =4,26 - коэффициент формы зуба;
=4,26 - коэффициент формы зуба;
![]() - коэффициент ширины венца;
- коэффициент ширины венца;
![]() - коэффициент, учитывающий распределение нагрузки по ширине венца;
- коэффициент, учитывающий распределение нагрузки по ширине венца;
![]() МПа - допустимое напряжение при расчете зубьев на изгибную прочность (сталь 40XH, термообработка поверхностная токами высокой частоты), тогда
МПа - допустимое напряжение при расчете зубьев на изгибную прочность (сталь 40XH, термообработка поверхностная токами высокой частоты), тогда
![]() (мм).
(мм).
Принимаем m=4 (мм), тогда
![]() (мм);
(мм);
![]() (Н);
(Н);
Площадь поршня гидроцилиндра (давление p=0,4 (МПа)).
![]() (мм).
(мм).
Принимаем: dп=80 (мм).
4. Разработка системы управления 4.1 Разработка электрической системы управления
В данном курсовом проекте система управления основана на контроллере FECCompact.
Контроллеры серии FEC Compact.
Контроллеры FEC (Front End Controller) - это семейство однокорпусных промышленных программируемых логических мини-контроллеров, включающее серии контроллеров FEC Compact и FEC Standard.
Эти контроллеры разработаны как недорогая универсальная промышленная система управления, которая может быстро и легко устанавливаться и эксплуатироваться людьми, имеющими небольшой опыт работы с программируемыми контроллерами. Все функции для небольшой системы управления интегрированы в одном корпусе.
FEC Compact (рис.4) предназначены для обработки только дискретных сигналов, могут использоваться в стандартных релейных шкафах управления и идеально подходят для управления там, где требуется небольшое количество входов и выходов. Они предназначены для решения простых задач автоматизации технологического оборудования и технологических процессов с минимальными затратами.

Рис.4 - Контроллер FEC Compact
В пластмассовом корпусе FEC Compact с габаритными размерами 130x80x35 мм или 130x80x60 мм (модели со встроенным преобразователем питания - 220 В / +24 В) и классом защиты IР40 установлены следующие основные составляющие контроллера:
процессор АМD186 (тактовая частота 20 МГц), подобный процессору Intel 80186,память оперативная 256 Кб (16-битная SRAM), из которых 210 Кб свободны для прикладных программ, или 512 Кб (16-битная DRAM), из которых 480 Кб свободны для прикладных программ,
Flash-память (перезаписываемая память для программ) 256 Кб, количество циклов перезаписи 10 тысяч, область сохраняемых переменных данных 2 Кб,
12 каналов ввода транзисторных при напряжении питания 24 В постоянного тока (до 7 мА по каждому каналу), гальваническая развязка (оптоэлектронная пара, напряжение изоляции до 50 В переменного тока) и световая индикация по каждому каналу (светодиоды после гальванической развязки),
8 каналов вывода (напряжение изоляции до 300 В переменного тока) со световой индикацией по каждому каналу (светодиоды), которые реализованы в нескольких вариантах:
электромеханические реле, коммутирующие в рабочем режиме переменный ток до 2 А при напряжении до 250 В или постоянный ток до 5 А при напряжении до 30 В, частота переключений до 25 Гц,
твердотельные реле (SSR-реле или Solid-state relay), коммутирующие переменный ток до 0,6 А при напряжении до 264 В или постоянный ток до 0,6 А при напряжении до 125 В, срок службы 100 тыс. часов, частота переключений до 10 Гц,
транзисторные выходы, коммутирующие постоянный ток до 0,6 А при напряжении 24 В, срок службы 100 тыс. часов, максимальная частота переключения 1 кГц,
комбинация реле и транзисторных выходов,
последовательные интерфейсы для программирования и подключения внешних устройств СОМ (РS232, 9600 бод с разъемом RJ11 или ТТL с разъемом RJ12) и ЕХТ (56 Кбод, ТТL с разъемом RJ12),
сетевой интерфейс Ethernet 10Base T,
преобразователь электропитания (-220 В / +24 В) в тех моделях контроллеров, в которых предусмотрено питание от сети переменного тока.
Контроллеры поставляются с записанной в постоянную память операционной системой ROM DOS 5/0 и программой Kernel (FSTPCRx. EXE).
Основные характеристики поставляемых моделей контроллеров серии FEC Compact приведены в таблице 1.
Таблица 1 - Серии контроллеров FEC Compact с программированием в пакете FST
| Тип контроллера | Характеристики |
| FC 20-FST | 12 входов/8 выходов релейных, питание 24 В постоянное |
| FC 21-FST | 12 входов/8 выходов релейных, питание 220 В переменное |
| FC 22-FST | 12 входов/8 выходов SSR-реле, питание 24 В постоянное |
| FC 23-FST | 12 входов/8 выходов SSR-реле, питание 220 В переменное |
| FC 30-FST | 12 входов/2 релейных, 6 транзисторных выходов, питание 24 В постоянное |
| FC 34-FST | 12 входов/2 релейных, 6 транзисторных выходов, питание 24 В постоянное, Ethernet 10 BaseT |
Контроллеры FEC Compact питаются от стабилизированного источника постоянного тока с напряжением 24 В или от сети переменного тока 220 В.
Не рекомендуется, а в некоторых случаях категорически противопоказано, подключать контакт заземления контроллера на общую "землю" основного оборудования или цеха, если нет уверенности в том, что общее заземление сделано в соответствии с нормами и на нем нет потенциала, отличного от нуля.
При установке контроллеров необходимо обратить внимание на окружающие условия, при которых они будут нормально функционировать. Нельзя устанавливать контроллеры в местах, где присутствует чрезмерная пыль, масляный туман, токопроводящая пыль или газ, вызывающие коррозию, там, где присутствует вибрация, высокая температура, прямые солнечные лучи, влажность, дождь, а также непосредственно вблизи высоковольтного оборудования. Нельзя устанавливать контроллеры непосредственно над устройством, выделяющим теплоту, типа нагревателя, трансформатора или мощного резистора. Если окружающая температура более 55°С, необходимо установить вентилятор для принудительного охлаждения.
Контроллер может быть установлен на монтажной рельсе (DIN46277, ширина 35 мм) или непосредственно на винты М4. В процессе установки необходимо убедиться, что модуль установлен как можно дальше от оборудования с высоким напряжением и большой мощности.
12 входов контроллеров FEC Compact PNP или NPN типа разделены на две группы: первая группа 8 входов, вторая группа 4 входа. Имеется гальваническая развязка (оптоэлектронная пара) и индикация входных сигналов через светодиоды (после гальванической развязки). Время задержки приема сигнала 5 мс. Максимальное напряжение включения 15 В, выключения 5 В. Два входа второй группы могут также использоваться как счетчики с максимальной частотой 2 кГц. Провода для входных сигналов подключаются 14 винтами (12 сигнальных и 2 общих провода). На каждый винт можно присоединить 2 провода сечением до 0.75 mm2.
В соответствии с этим описанием выбираем контроллер марки FC 34-FST.
При подключении к выходам контроллера элементов со значительной нагрузочной способностью (реле, контакторы и пр) рекомендуется устанавливать плавкий предохранитель от 5 до 10А для каждой группы выходов, чтобы предохранить от повреждения из-за коротко го замыкания. Подключение обратного диода параллельно индуктивной нагрузке также значительно удлинит срок службы контроллера.
4.2 Программирование контроллеров FEC COMPACTДля практического применения описанных контроллеров с подключенными входами-выходами и питанием необходимо записать в их память прикладную программу заказчика, которая реализует разработанный им алгоритм управления объектом. Это может быть промышленная установка, станок, коммутирующее устройство, оборудование жилого дома и т.д. Такую программу можно создать, имея определенные навыки в обращении с персональными компьютерами и пакет программ для программирования контроллеров.
Программирование контроллеров серии FEC Compact осуществляется с помощью пакета программ FST, который реализован в двух вариантах: как приложение DOS и приложение Windows. Он может устанавливаться на персональных компьютерах с операционными системами DOS или Windows 95/ 98/ 2000/ NТ.
Проанализировав все выше сказанное, выбран контроллер FC 30-FST, у которого 12 входов/2 релейных, 6 транзисторных выходов, питание 24 В постоянное.
Комплекс питается от трехфазной сети переменного тока 380 В 50 Гц и 220 В 50 Гц.
Питание всех датчиков и контроллера осуществляется стабилизированным блоком питания +24 V DC.
К входам контроллера подключаются два датчика, а также четыре кнопки управления.
К выходам контроллера подключаются электромагнитные реле постоянного тока К1, К2.
Электрическая принципиальная схема представлена на листе АСК 00.00.01 СЭ.
Рассчитаем потребляемую мощность:
потребляемая мощность контроллера 10 Вт
потребление тока индукционным датчиком 40 mA,
потребление тока датчиком конечного положения 500 mA,
потребление тока светодиодами 10 mA.
Потребляемая максимальная мощность:
P=10+ (24* (0,04*1+0,5*4+0,01*3)) = 60 (Вт)
Микросхема DA1 представляет собой интегральный стабилизатор К142 ЕН9Б с фиксированным выходным напряжением 24±0,48В с максимальным током нагрузки 3 (А), выполненная по планарной диффузионной технологии с изоляцией р-n переходом. Она предназначена для использования в стабилизированных блоках питания радиоэлектронной аппаратуры.
Выпрямление напряжения осуществляется с помощью диодных мостов VD1 - VD4.
Необходимое напряжение для блоков питания и контроллера обеспечивает трансформатор TV1. В цепи блоков питания также установлены плавкие предохранители FU3, FU4.
Таблица 2. - входов-выходов контроллера FecCompact.
| Входы | Назначение входа | Выходы | Назначение выхода |
| I0.0 | Наличие заготовки в зоне захвата ЗУ ПР. | O0.0 | Захват заготовки |
| I0.1 | Рука ПР опущена | O0.1 | Поднятие руки ПР |
| I0.2 | Рука ПР поднята | O0.2 | Опускание руки ПР |
| I0.3 | Рука ПР втянута | O0.3 | Выдвижение руки ПР |
| I0.4 | Рука ПР выдвинута | O0.4 | Втягивание руки ПР |
| I0.5 | Рука ПР повёрнута к лотку | O0.5 | Рука ПР повёрнута к станку |
| I0.6 | Рука ПР повёрнута к станку | O0.6 | Рука ПР повёрнута к лотку – накопителю |
| I0.7 | Рука ПР повёрнута к лотку - накопителю | О0.7 | Сигнал на ЧПУ станка |
| I1.0 | Сигнал с ЧПУ станка | О0.8 |
Текст управляющей программы представлен в приложении А.
Заключение
В данном курсовом проекте была разработана автоматизированная линия по изготовлению деталей типа "Вал-шестерня" отвечающая требованиям современного машиностроения изготовления детали "вал" и содержит пояснительную записку и графический материал. В ходе выполнения курсового проекта были решены следующие задачи:
проведен анализ технологичности детали;
предложен и экономически обоснован метод получения заготовки;
разработан технологический процесс;
разработан чертёж общего вида АЛ (АСК 00.00.01 ВО);
разработан алгоритм работы и система управления РТК (АСК 00.00.01, АСК 00.00.01 СЭ);
разработан сборочный чертёж захватного органа ПР (АСК 01.00.00 СБ).
Библиографический список
1. Анурьев В.Н. Справочник конструктора-машиностроителя.: В 3-х томах 5-е изд., перераб. и доп. - М.: Машиностроение, 1979 - 728с.
2. Горохов В.А. Проектирование и расчет приспособлений. Минск, "Высшая школа", 1986 г.
3. Ковшов А.Н. Технология машиностроения: Учебник для студентов машиностроительных специальностей вузов - М.: Машиностроение, 1987. - 320с.
4. Козырев Ю.Г. Промышленные роботы: Справочник. - 2-е изд., перераб. и доп. - М.: Машиностроение, 1988. - 392 с.: ил.
5. Обработка металлов резанием: Справочник технолога / А.А. Панов, В.В. Аникин, Н.Г. Бойм и др.; Под общей ред. А.А. Панова. - М.: Машиностроение. 1988.736с.
6. Промышленные роботы в машиностроении: Альбом схем и чертежей: Учебн. Пособие для технических вузов/ Ю.М. Соломенцев, К.П. Жуков, Ю.А. Павлов и др.; Под общей ред. Ю.М. Соломенцева. - М.: Машиностроение. 1986.140с.
7. Справочник технолога-машиностроителя. В 2 т. Т1/ Под ред.А.Г. Косиловой и Р.К. Мещерякова. - 4-е изд., перераб. и доп. - М.: Машиностроение, 1985.
8. Современные промышленные роботы: С56 Каталог/ Под ред. Ю.Г. Козырева, Я.А. Шифрина. М.: Машиностроение, 1984.152 с., ил.
9. Транспортно-накопительные и загрузочные системы в сборочном производстве: Учеб. Пособие / Е.В. Пашков, В.Я. Копп, А.Г. Карлов. К.: УМК ВО, 1992. - 536с.
10. Методическое указание для выполнения КР студентами дневной формы обучения специальности 12.01 по дисциплине автоматизация производственных процессов машиностроении. Изд-во "СевГТУ" 1996 г.
11. Пашков Е.В., Осинский Ю.А., Четверкин А.А. Электропневмоавтоматика в производственных процессах: Учебное пособие. - Севастополь: Изд-во СевГТУ, 1997.368с.
Приложение
Текст управляющей программы на языке STL
STEP 1
IF I0.0
AND I0.1
AND I0.3
AND I0.5
THEN
SET O0.0
SET O0.1
STEP 2
IF I0.2
AND I0.6
THEN
SET O0.5
SET O0.3
STEP 3
IF I0.4
AND I0.6
THEN
SET O0.7
RESET O0.0
RESET O0.3
SET O0.4
STEP 4
IF I1.0
AND I0.3
AND I0.6
THEN
RESET O0.4
SET O0.3
SET O0.0
STEP 5
IF I0.3
AND I0.6
THEN
RESET O0.3
SET O0.4
SET O0.6
STEP 6
IF I0.3
AND I0.7
THEN
RESET O0.4
SET O0.3
RESET O0.0
JMP TO 1
Похожие работы
... целесообразно использовать ковку в подкладном штампе. Чертеж заготовки представлен на рис.4.1. При этом способе изготовления заготовки возможно получить припуски до 3 мм, с допусками +1.5 ¸ -1 мм. 5. Выбор плана обработки детали Технологический процесс обработки детали предусматривает несколько стадий. Если рассматривать данный процесс в укрупненном плане, то необходимо выделить ...
... выпусков изделий изготовление их ведется путем непрерывного выполнения на рабочих местах одних и тех же постоянно повторяющихся операций. Определим тип производства при изготовлении детали "картер" массой 6 кг. При разработке новых технологических процессов, когда технологический маршрут механической обработки детали не определен, используют коэффициент серийности , (3.5.1) где tв - такт выпуска ...
... заготовки Штамповка 5. Масса заготовки 2,309 кг. 6. Годовая программа выпуска 15000 7. Режим работы 2 смены 8. Продолжительность смены8 часов 9. Коэффициент загрузки участка 0,4 10.Технологический процесс изготовления детали Таблица 1. Таблица 1 № Наименование операции Тип обору-дования Норма времени Разряд работ Мощность Электродвигателя, (кВт) tшт, мин. tо, ...
... Заготовка h14 30 Черновое точение h14 1,5 Т40 1,4 28,6 Чистовое точение h12 1,2 Т40 1,2 27,4 шлифование 0,40 Т40 0,40 27 5. Разработка технологического процесса изготовления заданной детали 005 Заготовительная Рассчитать припуски 010 Фрезерно-центровальная 1 Фрезеровать торцы 2 Засверлить ...
0 комментариев