Навигация
Определение основных размеров кулачкового механизма
27907
знаков
2
таблицы
11
изображений
1.2 Определение основных размеров кулачкового механизма
Для кулачковых механизмов с поступательно движущимся толкателем основными размерами звеньев, определяющими величину угла давления и размеры механизма, являются:
а) минимальный радиус rmin кулачка;
б) смещение (дизаксиал) е – кратчайшее расстояние от оси вращения
кулачка до оси толкателя.
Минимальный радиус rmin кулачка определяется из условия ограничения угла давления. Для любого положения механизма текущий угол давления не должен превышать максимально допустимое значение βadm. Основные размеры кулачкового механизма можно определить графически, решая условие незаклинивание механизма:
Так как дизаксиал е и допускаемое значение βadm заданны, то можно найти rmin (рис.2). ![]() мм – минимальный радиус кулачка.
мм – минимальный радиус кулачка.
1.3 Построение теоретического профиля кулачка
Построение профиля кулачка проводится методом обращенного движения: всему механизму сообщается вращение вокруг оси кулачка с угловой скоростью – ω, равной и обратнонаправленной угловой скорости ω кулачка.
Тогда по отношению к неподвижной системе координат кулачек остановится, а толкатель будет совершать плоскопараллельное движение.
Из произвольной точке проводим окружности радиусами rmin и е в принятом масштабе М 2:1. Окружность радиусом е разбиваем на n=24 частей в направлении против хода часовой стрелки, так как дизаксиал отрицательный. Из полученных точек проводим полукасательные по вращению кулачка. Эти полукасательные есть положение оси толкателя в обращенном движении. В принятом масштабе М отложим от точек пересечения полукасательных с окружностью радиусом rmin во внешнюю сторону отрезки Si, соответствующие перемещению толкателя для данного положения кулачка по таблице 1. Соединив полученные точки, получим теоретический профиль кулачка.
1.4 Выбор радиуса ролика
Построение практического профиля кулачка.
Радиус ролика rр выбирается из условий наименьших контактных напряжений и обеспечения реальных размеров кулачка:
rр≤0,7ρmin; rр≤0,4rmin, где ρmin – минимальный радиус кривизны теоретического профиля кулачка.
ρmin=42 мм, следовательно, должно быть rр≤29,4 мм и rр≤18,68 мм.
Из таблицы 4 [1] выбираем в качестве ролика радиальный шарикоподшипник сверхлегкой серии с радиусом
rр=D/2
и радиусом оси
r=d/2
1000904, D=37 мм, d=20 мм, rp=18,5 мм, r=9,25 мм.
Практический профиль кулачка получается, если теоретический уменьшить на величину радиуса ролика rр. Для этого из точек на теоретическом профиле проводят окружности радиусом rр и по внутренней огибающей этих окружностей проводят линию, которая является практическим профилем кулачка.
1.5 Расчет толщины кулачка
Для нормальной работы кулачкового механизма необходимо выполнения условия контактной прочности:
 , где
, где
F – сила взаимодействия толкателя и кулачка [Н];
b – толщина кулачка [мм];
![]() - приведенный модуль упругости;
- приведенный модуль упругости;
![]() - приведенный радиус кривизны;
- приведенный радиус кривизны;
σНadm – допускаемое контактное напряжение [МПа].
Для сталей марок 45, 20Х, из которых обычно изготавливают кулачки и ролики Ек=Ер=2,1∙105 МПа. Для них σНadm=400...600 МПа.
Епр=2,1∙105 МПа, ρпр=12,84 мм, F=Pmax=19 H

Но толщина кулачка не должна быть меньше 4 мм, поэтому выбираем b=4 мм, что удовлетворяет перечисленным условиям.
2. Проектирование механического привода
Механическим приводом называется совокупность электродвигателя и передаточных механизмов, которые могут состоять из различного вида зубчатых передач и ременных передач. Передаточные механизмы, служащие для понижения угловых скоростей валов и, одновременно, увеличения крутящих моментов на них, выполненные в виде отдельных агрегатов, называются редукторами. В качестве передаточных механизмов применяются открытые передачи. В отдельных случаях они заключаются в легкий корпус из листовой стали, алюминия или пластмассы.
2.1 Расчет планетарной ступени редуктора
Отличительной особенностью планетарной передачи является наличие в них сателлитных зубчатых колес, которые вращаются и относительно собственных осей, связанных с водилом, и относительно осей центральных колес. Планетарные зубчатые передачи позволяют осуществить большие передаточные отношения при малом количестве колес. Недостатком является низкий КПД при больших передаточных отношениях. Передаточное отношение планетарной ступени Uпл.=U1h=23. Чтобы получить такое передаточное отношение используется планетарная передача, выполненная по схеме:

Н – водило;
2-2ﺍ - сателлитные зубчатые колеса;
1 – подвижное центральное колесо;
3 – неподвижное центральное колесо.
Определяется число зубьев колес, чтобы обеспечивать заданное передаточное отношение с допустимой точностью, условие отсутствия заклинивания колес, условие соосности, условие соседства сателлитов и условие сборки передачи.
Передаточное отношение (*)
 ,
,
где Z1, Z2, Z2ﺍ ,Z3 – числа зубьев колес. Подбор числа зубьев ведется только по двум условием – кине-
матическому (формула *) и соосности, а подбор числа сателлитов и проверка – по трем остальным условиям. Для
Uпл=23: 
Заменив числа зубьев колес пропорциональными им числами, получим
 ,
,
тогда a=1, b=5, c=5, d=22. Числа зубьев колес определяются по формулам: γ – любое положительное число, обеспечивающее условие отсутствия заклинивания:
для внутреннего зацепления ![]() ,
, ![]() ,
, ![]() , для внешнего
, для внешнего ![]() . Эти условия выполняются при γ=1.
. Эти условия выполняются при γ=1.
Тогда ![]() ,
, ![]() ,
, ![]() ,
, ![]()
Из условия соседства сателлитов найдем возможное число блоков сателлитов из условия:
 ,
,
так как ![]() , получим
, получим
значит ![]()
Из условия сборки определяем возможное число блоков сателлитов
![]() ,
,
где С0 – любое целое число. Тогда
![]() ,
, ![]()
Выбираем число сателлитов ![]() , удовлетворяющее обоим условиям.
, удовлетворяющее обоим условиям.
Похожие работы
... , можно использовать для управления ракетой в двух взаимно-перпендикулярных областях: по направлению (правее левее) и по высоте (выше ниже). Однако в рассматриваемой системе равносигнальная зона используется для управления ракетой только в горизонтальной плоскости, а управление по высоте выполняется автономной аппаратурой. Для того, чтобы ракета, совершающая полет на заданной высоте, не имела ...
... в проведении операций компенсации входного сигнала и поэтому нашли широкое распространение для измерения, регистрации, сигнализации и автоматического регулирования температуры в металлургических агрегатах. На рисунке приведена упрощенная схема устройства автоматического потенциометра. Сигнал сравнивается с компенсирующим напряжением Uk, снимаемым с диагонали неуравновешенного измерительного ...
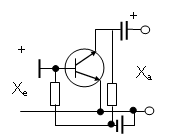
... , Тайваня, США. Телефон-трубка собрана на семи транзисторах. Питание схемы снимается с диодного моста VD4 — VD7 через герконовый (или другого типа) переключатель SA1. На транзисторах VT1, VT2, VT3 собраны дифференциальная схема и электронный ключ для набора номера. Питание разговорной части схемы снимается с делителя R5, R8 и зависит от номинала резистора R8, (150 — 200 Ом). На транзисторе VT4 ...
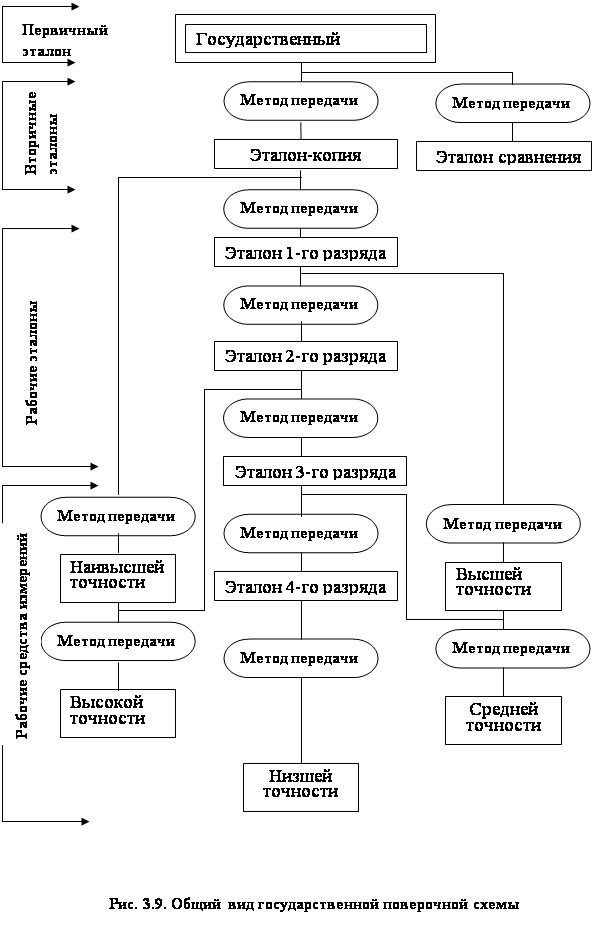
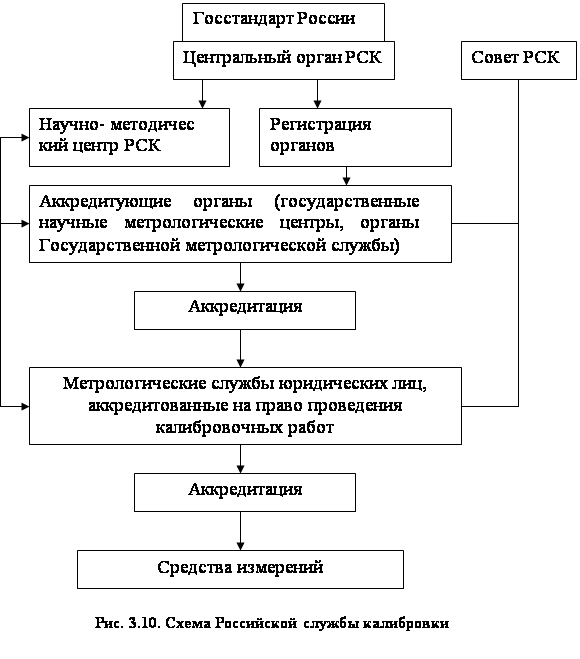
... иные нарушения, включая разглашение государственной или коммерческой тайны, государственные инспекторы могут быть привлечены к ответственности в соответствии с законодательством Российской Федерации. 3.9. Основы квалиметрии [47] Квалиметрия — раздел метрологии, изучающий вопросы измерения качества. Здесь используются те же законы и правила, что и в области измерения физических величин, но есть ...
0 комментариев