Навигация
Обоснование выбора элементной базы
63963
знака
3
таблицы
3
изображения
2.4. Обоснование выбора элементной базы
При изготовлении данного устройства использовалась технология смешанного монтажа (поверхностный, штыревой). Использование штыревого монтажа явилось необходимостью.
Технологии поверхностного монтажа предпочтительнее по ряду причин:
более высокие технические характеристики (расширение полосы частот при снижении паразитных составляющих индуктивности и емкости), компактность (технология поверхностного монтажа позволяет устанавливать самые миниатюрные компоненты), повышенная надежность (технология поверхностного монтажа минимизирует участие человека в создании печатной платы, скажем при пайке).
Конечная продукция, с использованием поверхностного монтажа, обладает более постоянными характеристиками.
Каждая матричная система проходит тщательное тестирование по внешнему управлению и связи с периферийными устройствами. При этом тестируются скорость и точность обмена данными между системой и внешними управляющими устройствами. Если матричная система не прошла хотя бы один из этих тестов, она не покидает производственное здание.
Кроме того, поверхностный монтаж позволяет использовать новые корпуса интегральных схем с малым шагом между выводами (0,5–0,65мм), корпуса с шариковыми выводами (BGA), новые малогабаритные дискретные компоненты и соединители. Повысить точность изготовления печатных плат, увеличились возможности для разводки сложных устройств в малых габаритах. Появление новой элементной базы позволяет говорить о возможности воплощения сложных систем на одной плате и даже на одном кристалле (system-on-chip). Это означает, что на одной и той же типичной плате устройства обработки сигналов, в малых габаритах размещаются высокочувствительный аналоговый тракт, аналого-цифровой преобразователь, высокоскоростная схема цифровой обработки на процессоре, а на программируемых логических интегральных схемах – буферные элементы и драйверы линий связи, элементы стабилизаторов напряжения питания и преобразователей уровня, а также другие узлы. Естественно, это накладывает отпечаток на методологию разработки платы.
Микросхема PIC16F73 - I/SO
Микроконтроллеры семейств PIC (Peripheral Interface Controller) компании Microchip объединяют все передовые технологии микроконтроллеров: электрически программируемые пользователем ППЗУ, минимальное энергопотребление, высокую производительность, хорошо развитую RISC-архитектуру, функциональную законченность и минимальные размеры.
Основным назначением микроконтроллеров семейств PIC, как следует из аббревиатуры PIC (Peripheral Interface Controller), является выполнение интерфейсных функций. Этим объясняются особенности их архитектуры:
· RISC-система команд, характеризующаяся малым набором одноадресных инструкций (33, 35 или 58), каждая из которых имеет длину в одно слово (12, 14 или 16 бит) и большинство выполняется за один машинный цикл. В системе команд отсутствуют сложные арифметические команды (умножение, деление), предельно сокращен набор условных переходов;
· высокая скорость выполнения команд: при тактовой частоте 20 МГц время машинного цикла составляет 200 нс (быстродействие равно 5 млн. операций/сек);
· наличие мощных драйверов (до 25 мА) на линиях портов ввода/вывода, что позволяет подключать непосредственно к ним довольно мощную нагрузку, например, светодиоды;
· низкая потребляемая мощность;
· ориентация на ценовую нишу предельно низкой стоимости, определяющая использование дешевых корпусов с малым количеством выводов (8, 14, 18, 28), отказ от внешних шин адреса и данных (кроме PIC17C4X), использование упрощенного механизма прерываний и аппаратного (программно недоступного) стека.
Таблица №2
| Основные технические характеристики | Чип резисторы 0805 | Чип резисторы 2512 |
| Номинальная мощность при 70°С Рабочее напряжение Максимально допустимое напряжение Диапазон рабочих температур Температурный коэффициент сопротивления | 1Вт 200В 400В -55 +125°С 100ppm/С | 0.125Вт 300В 500В -55 +125°С 100ppm/С |
2.5 Расчет на действие механических нагрузок
2.5.1. Расчет печатной платы на действие вибрации
Целью расчета конструкции РЭА при действии вибрации является определение действующих на элементы изделия максимальных перегрузок и перемещений.
Периодическая вибрация характеризуется спектром (диапазон частот), виброускорением, перегрузкой. Коэффициент перегрузки п, амплитуда виброускорения а, и виброперемещения S, связаны между собой соотношениями:
Исходными данными при расчете на вибрацию являются: частота вибрации (диапазон частот), Гц; масса блока (части блока); коэффициент перегрузки.
При расчете ПП с ЭРЭ задается (определяется) масса ПП и масса ЭРЭ.
Исходные данные для расчета:
Диапазон вибрационных воздействий: ![]() ,
,![]() ;
;
Коэффициент перегрузки: ![]() ;
;
Длина платы: ![]() ;
;
Ширина платы: ![]() ;
;
Толщина платы: ![]() ;
;
Коэффициент Пуассона материала ПП: ![]() ;
;
Модуль упругости материала ПП: ![]()
Удельный вес материала ПП: ![]() ;
;
Плотность материала ПП: ![]() .
.
Последовательность расчета следующая:
1.Определяем частоту собственных колебаний. При условии равномерного нагружения ПП по ее поверхности ЭРЭ:
 ,
,
где:
![]() -ускорение свободного падения;
-ускорение свободного падения;
![]() -длина ПП;
-длина ПП;
![]() -толщина ПП;
-толщина ПП;
![]() - удельный вес материала ПП;
- удельный вес материала ПП;
 ,
,
где:
![]() -масса ЭРЭ;
-масса ЭРЭ;
![]() -масса ПП;
-масса ПП;
где:
![]() -длина ПП;
-длина ПП;
![]() -ширина ПП;
-ширина ПП;
![]() - толщина ПП;
- толщина ПП;
![]() -плотность материала ПП;
-плотность материала ПП;
![]() ;
;
![]() ;
;
![]() -коэффициент, зависящий от способа закрепления ПП;
-коэффициент, зависящий от способа закрепления ПП;
Для случая защемления платы по контуру:
![]() - цилиндрическая жесткость;
- цилиндрическая жесткость;
где:
![]() - модуль упругости материала ПП;
- модуль упругости материала ПП;
![]() - коэффициент Пуассона материала ПП;
- коэффициент Пуассона материала ПП;
![]() ;
;
 .
.
2.Находим амплитуду колебаний (прогиб) ПП на собственной частоте при заданном коэффициенте перегрузки п по формуле:
 ;
;
где:
![]() - коэффициент перегрузки;
- коэффициент перегрузки;
![]() - частота собственных колебаний ПП.
- частота собственных колебаний ПП.
![]() .
.
3.Определяем коэффициент динамичности ![]() , показывающий, во сколько раз амплитуда вынужденных колебаний на частоте
, показывающий, во сколько раз амплитуда вынужденных колебаний на частоте ![]() отличается от амплитуды на частоте
отличается от амплитуды на частоте ![]() :
:
 ;
;
где:
![]() - показатель затухания колебаний (для стеклотекстолита при напряжениях, близких к допустимым, принимают
- показатель затухания колебаний (для стеклотекстолита при напряжениях, близких к допустимым, принимают ![]() );
);
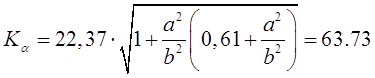
 - коэффициент расстройки;
- коэффициент расстройки;
Вычислим ![]() при
при ![]() :
:
![]()
4.Находим динамический прогиб в геометрическом центре ПП при ее возбуждении с частотой ![]() :
:
![]() ;
;
![]() ;
;
5.Определяем эквивалентную этому прогибу равномерно распределенную динамическую нагрузку ![]() :
:
 ;
;
и максимальный распределенный изгибающий момент, вызванный этой нагрузкой:
![]() ;
;
где:
C1 и C2 - коэффициенты, зависящие от размеров ПП и способа ее закрепления.
Для защемления ПП по контуру на a/b£3 значения C1 и C2 определяются по формулам:
C1=0,0012+0,04 lg(a/b)
C2=0,0513+0,108 lg(a/b).
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
6.Находим максимальное динамическое напряжение изгиба ПП:
![]() ;
;
![]() ;
;
7. Условия вибропрочности выполняются, если smах£[s],
 ;
;
где:
s-1 - предел выносливости материала ПП, для стеклотекстолита,
s-1=105 Мпа;
ns=1,8 -допустимый запас прочности для стеклотекстолита.
![]() ;
;
Вывод: условие вибропрочности для ПП выполняется, так как smах<[s]
2.5.2.Расчет печатной платы на действие удара
Ударные воздействия характеризуются формой и параметрами ударного импульса.
Ударные импульсы могут быть полусинусоидальной, четвертьсинусоидальной, прямоугольной, треугольной и трапециевидной формы.
Максимальное воздействие на механическую систему оказывает импульс прямоугольной формы. Параметрами ударного импульса являются:
- длительность ударного импульса (t),
- амплитуда ускорения ударного импульса (Ну).
Целью расчета является определение ударопрочности конструкции при воздействии удара.
Ударный импульс действует только в течение времени t и величина w=p/t получила название условной частоты импульса.
Исходными данными для расчета конструкции на ударопрочность являются:
- параметры ударного импульса (tи,Ну)
- параметры конструкции
- характеристики материалов конструкции или собственная частота колебаний механической системы.
Исходные данные для расчета:
Длительность ударного импульса: ![]()
Амплитуда ускорения ударного импульса:![]() ;
;
Собственная частота колебаний механической системы: ![]() (расчет данной величины выполнен в пункте 2.5.1. ).
(расчет данной величины выполнен в пункте 2.5.1. ).
Расчет на ударопрочность проводим в следующей последовательности:
1.Определяем условную частоту ударного импульса:
![]() ;
;
где:
![]() - длительность ударного импульса;
- длительность ударного импульса;
![]() ;
;
2.Определяем коэффициент передачи при ударе (для прямоугольного импульса):
![]() ;
;
где:
n - коэффициент расстройки
 ;
;
fс - собственная частота колебаний механической системы.
![]() ;
;
![]() ;
;
3.Находим ударное ускорение:
![]() ;
;
где:
Ну -амплитуда ускорения ударного импульса.
![]() ;
;
4.Рассчитываем максимальное относительное перемещение (для прямоугольного импульса):
 ;
;
![]() ;
;
5.Проверяем выполнение условий ударопрочности по следующим критериям:
1.Для ЭРЭ ударное ускорение должно быть меньше допустимого, т.е. ау<аудоп, где аудоп определяется из анализа элементной базы изделия;
![]() , следовательно ау<аудоп.
, следовательно ау<аудоп.
2.Для ПП с ЭРЭ Smах<0,003b, где b – размер стороны ПП, параллельно которой установлены ЭРЭ;
![]() ;
;
![]() , следовательно Smах<0,003b.
, следовательно Smах<0,003b.
Вывод: условия ударопрочности выполняются.
Похожие работы
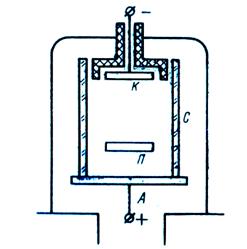
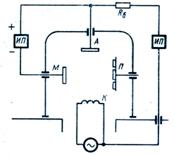
... напыления двух различных металлов путем поочередного подключения испарителей к силовому блоку питания, а также была оснащена заслонкой с управлением электромагнитом. 2.1. Конструкция и принцип работы базовой лабораторной установки вакуумного напыления 2.1.1. Блок-схема Установка состоит из трех основных структурных единиц. Это, собственно, вакуумная камера, в которой производится нанесение ...
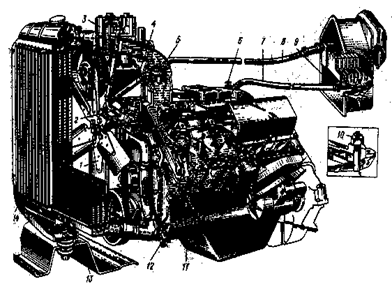
... изменений Далее будет предложен и рассмотрен вариант усовершенствования системы охлаждения рассматриваемого в данной работе двигателя ЗМЗ-406 автомобилей ГАЗ 2705, 3221 «ГАЗЕЛЬ». Описание целей и элементов доработки системы охлаждения двигателя ЗМЗ-406 по пунктам приведены ниже. Основные элементы системы и режимы работы приведены на рис. 20…24. 1. Вместо вентилятора и гидронасоса с ...


... , лари размещают в торговом зале, торгующем традиционным методом и методом самообслуживания. В крупных магазинах с большим количеством холодильного оборудования и торговой площадью свыше 1000 м2 применяют в основном централизованное холодоснабжение, т. е. все холодильные агрегаты расположены в специальном помещении, находящемся вне торгового зала, там же размещены и пульты управления с приборами ...
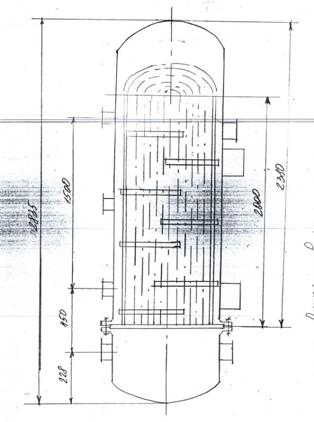
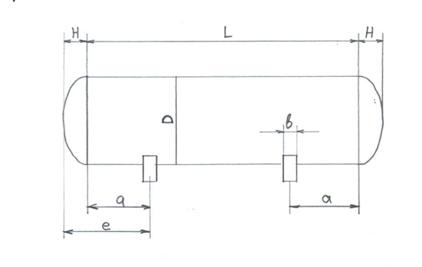
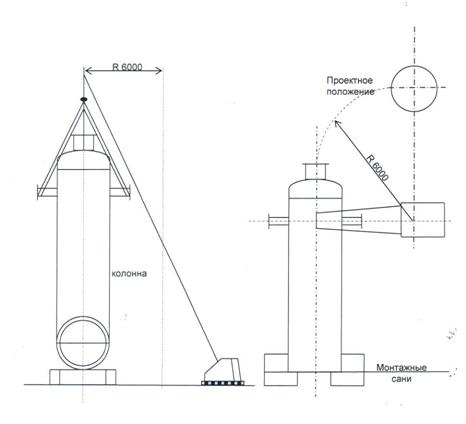
... Тогда оперативное время составляет : =5 + 0,38 = 5,38 мин. Определим штучное время для данной операции: = 5,38мин Заключение В проекте разработано основное оборудование блока регенерации растворителя установки депарафинизации масел колонна и теплообменник. В колонне взамен S-образных тарелок использованы колпачковые тарелки с повышенным КПД, кроме того, с переходом на двухгодичный цикл ...
0 комментариев