Навигация
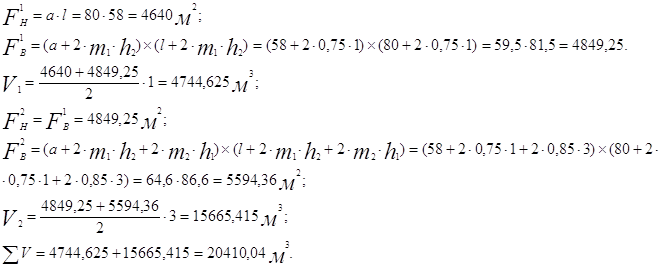
3.2 Земляні споруди
Земляні роботи є складовою частиною будівництва більшості інженерних споруд. Вони включають: уривку котлованів, траншей і меліоративних каналів; зведення насипів, дамб; пристрій закритих проходок в ґрунті у вигляді шахт і тунелів під різні підземні споруди; насипи залізних і шосейних доріг, для установки опор паль в щільних ґрунтах, для закладки зарядів вибухових речовин при розробці ґрунтів вибухом і т. п.
По характеру робочого процесу, складу операцій і послідовності їх виконання земляні споруди ділять на виїмки і насипи. Виїмка утворюється в результаті видалення надлишків грунту за її межі, а насип – шляхом відсипання грунту, внесеного ззовні, з його пошаровим ущільненням. Остання операція обумовлена необхідністю відновлення щільного стану грунту в насипі, який був їм втрачено при відділенні від масиву унаслідок розпушування. Видалений з виїмок ґрунт укладають у відвали, а для відсипання насипів його доставляють з кар'єрів або резервів, розташованих поблизу споруджуваному насипу. Якщо виїмки чергують з насипами, як, наприклад, в дорожньому будівництві, то витягуваний з виїмок ґрунт звичайно використовують для відсипання насипів. Для кожної з перерахованих технологічних схем виробництва земляних робіт – виїмка-відвал, резерв-насип – характерні операції відділення грунту від масиву, його переміщення і відсипання. При зведенні насипів додається операція ущільнення грунту, а загальною для насипів і виїмок є планувальна операція, якої ці інженерні споруди доводяться до проектних розмірів. При плануванні зрізаються виступи і засипаються западини подібно розробці резервів і відсипанню насипів, але тільки в розмірах мікрорельєфу планованої поверхні. Ту ж структуру робочого процесу має розробка кар'єрів будівельних матеріалів (піску, гравію і т. п.), а також видобуток корисних копалин відкритим способом. Відмінність полягає в тому, що ні забій, ні відвал не є інженерними спорудами, а планування дна кар'єру (підошви забою) виконують лише для зручності пересування по ньому машин і підготовки стійкої підстави для їх роботи.
Відділення грунту від масиву – руйнування – є основною операцією процесу його розробки. Найбільше поширення в будівництві (близько 85% від загального об'єму земляних робіт) набув механічний спосіб руйнування ґрунтів, при якому ґрунт відділяється від масиву унаслідок контактної силової дії на нього землерийного робочого органу. Енергоємність цього способу складає, 0,05…0,6 кВт-ч/м3. Міцні ґрунти і гірські породи руйнують вибухом з використанням вибухових речовин, які закладають в спеціально пробурені свердловини. Цей спосіб найдорожчий, але дозволяє істотно скоротити терміни виробництва робіт. Близько 12% ґрунтів розробляють гідромеханічним способом шляхом відділення грунту від масиву струменем води під високим тиском або в поєднанні з механічним способом. Енергоємність процесу складає 0,15…2 кВт-ч/м3.
Робочі органи машин, призначені тільки для відділення грунту від масиву механічним способом, використовують лише у разі розробки вельми міцних ґрунтів на стадії їх попереднього розпушування. Переважно робочі органи також переміщають і відсипають ґрунт у відвали, насипи або транспортні засоби, виконуючи ці операції після відділення грунту від масиву і його захоплення або суміщаючи повністю або частково перераховані операції в часі. Ґрунт може переміщатися до місця відсипання тільки за рахунок рухів робочого органу або за рахунок переміщення всієї машини. В конструкціях землерийних машин безперервної дії завершальну стадію транспортування грунту виконує спеціальний транспортуючий орган, наприклад, типу стрічкового конвеєра. Відсипають ґрунт шляхом звільнення від нього робочого або транспортуючого органу в кінці транспортної операції. У разі гідромеханічної розробки ґрунт переноситься до місця намивання в потоці води, а при вибуховому способі він відкидається в сторони розширяються газами, що утворюються унаслідок вибуху. Грубе планування земляних поверхонь виконують тими ж землерийними робочими органами шляхом більш чіткої координації їх руху, а для точного планування застосовують спеціальні робочі органи або машини. В загальному комплексі робіт на будівельному об'єкті земляні роботи частіше за все виконують раніше інших. В цьому випадку їм передує підготовка будівельного майданчика – видалення каміння, зрізає чагарника, корчування пнів, планування і засипка ям і т. п. Велику частину цих робіт виконують землерийними машинами, обладнаними спеціальними робочими органами. У зв'язку з цим машини для підготовчих робіт розглядають разом з машинами для земляних робіт. До підготовчих робіт також відносять попереднє розробці спушення міцних і мерзлих ґрунтів.
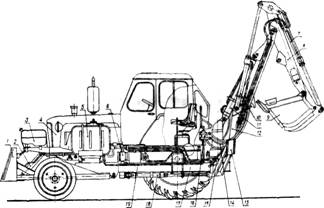
3.3 Параметри робочих положень екскаватора обладнаного прямою лопатою
Робочі рухи канатних одноковшових екскаваторів в режимі екскавації грунту забезпечуються механізмами підйому ковша, натиску, повороту і відкриття днища ковша. Для вироблення вимог, що пред'являються до цих механізмів, розглянемо робочий процес екскаватора.
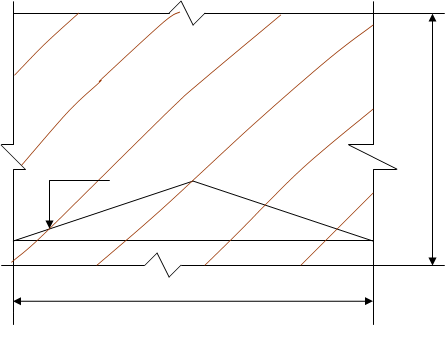
Для початку екскавації машину установлюють ближче до забою і опускають ківш до рівня стоянки (Рис. 3.1., положення І). Далі, при спільній роботі механізмів підйому і натиску ковша останній переміщають по траєкторії, має вид трохоїди, заповнюючи його ґрунтом, відокремлюваним від забою.
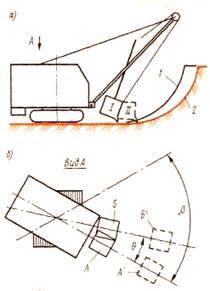
Рис. 3.1. Схема розробки грунту одноковшовим екскаватором з робочим устаткуванням прямої лопати
По заповненню ковша напірний рух замінюють на поворотне, трохи відсовуючи ківш від забою, щоб при подальшому його бічному переміщенні виключити зачіпання за забій. Далі поворотом платформи переміщають ківш з ґрунтом до місця розвантаження. Залежно від взаємного того, що розташовує екскаватора і відвала або транспортного засобу звичайно одночасно з поворотним рухом наводять ківш на мету, після чого відкриттям днища його розвантажують. Далі включають поворотний рух поворотного і напірного механізмів, а барабан підйомної лебідки розгальмовують, даючи ковшу можливість вільно опуститися до рівня стоянки екскаватора. Механізми перемикають на початок копання, коли ківш займе вихідну позицію для виконання наступного робочого циклу. Нове початкове положення ковша не співпадає з попереднім. Воно залежить від прийнятої схеми копання. Так, при роботі віяловою схемою кожне нове положення б (Рис. 3.1., б) вибирають як суміжне з попереднім. Цього досягають зсувом поворотного руху по відношенню до попереднього на кут 6. Після відробітку першого шару забою по всьому фронту, визначуваному кутом р\ початкове положення ковша 11 (див. Рис. 3.1, а) наближають до забою, переміщаючи далі ківш з цього положення по траєкторії 2, і т.д. Після відробітку забою в межах досяжності робочого устаткування (елемента забою) екскаватор переміщають на нову стоянку.
Товщина зрізу, а отже, опір грунту копанню і поточне значення силовою установкою, що розвивається потужності залежать від напірного переміщення, яке не залишається постійним при переході від однієї траєкторії до іншої, а також при відробітку різних по висоті забоїв. При постійній швидкості цього руху, реалізовуваній екскаваторним приводом, необхідних напірних переміщень добиваються періодичним виключенням цього руху протягом копання.
Висловлене дозволяє сформулювати наступні вимоги до механізмів екскаватора. Механізм підйому ковша повинен забезпечувати підйом ковша, утримувати його у фіксованому положенні, а також забезпечувати гравітаційне опускання ковша. З цією метою для одномоторних екскаваторів його виконують у вигляді нереверсивної, а для багатомоторних екскаваторів у виді – «реверсивних лебідок, обладнаних гальмами.
Механізм напору повинен забезпечувати переміщення рукояті в прямому (на забій) і поворотному (від забою) напрямах, а також її фіксація на певному вильоті при тимчасовому відключенні натиску в процесі копання грунту і для утримання рукояті від довільного опускання під час транспортної операції. Цей механізм виконують в двох варіантах: при однобалочній рукояті – у вигляді реверсивної лебідки, при двохбалочній рукояті – у вигляді реверсивної зубчато-рейкової передачі. По першому варіанту барабан 14 напірної лебідки, що приводиться в пряме або поворотне обертання від силової установки за допомогою ланцюгової передачі 15, встановлюють співісний з шарнірами п'яти стріли. Напірні канати 19, огнувши блоки 16, встановлені на стрілі в її середній частині, закріплюються в хвостовій частині рукояті, а канат поворотного руху 20– в її передній частині, у ковша. Ця канатна система забезпечує переміщення рукояті у напрямі збільшення її вильоту і в поворотному при відповідних обертаннях барабана в прямому (за годинниковою стрілкою) і поворотному напрямах.
В більшості випадків на екскаваторах з канатним натиском вільну гілку 17 підйомного каната закріплюють на напірному барабані, забезпечуючи цим монотонну залежність напірного зусилля від підйомного – із збільшенням опору грунту копанню зростає також зусилля в підйомному поліспасті, а отже, і в гілці 17, внаслідок чого збільшується той, що крутить, момент на напірному барабані.
Цим досягається плавна робота підйомного і напірного механізмів, легкість управління робочими рухами ковша при копанні.
При урізуванні ковша в твердий грунт з поверхні землі, а також для висунення максимально підтягнутої до головних блоків 5 рукояті з навантаженим ковшом, коли зусилля в канаті 17 недостатньо для її висунення, додатково використовують той, що крутить момент, передаваний напірному барабану ланцюговою передачею 15. По другому варіанту (див. мал. 6, в) незалежний від підйомного напірний рух рукояті передається від силової установки через систему двох ланцюгових передач 15 і 22 і пара шестерні. 23 – зубчаті рейки 21, встановлені на нижніх полицях балок рукояті. В будь-кому варіанті напірні механізми обладнали гальмами для фіксації положення рукояті щодо стріли.
Механізм повороту повинен забезпечувати пряме (на розвантаження) і поворотне (в забій) обертання поворотної платформи. З метою зниження непродуктивних витрат часу на поворотні рухи, які в середньому складають більш 2/3 тривалості робочого циклу, використовують режими прискореного розгону і гальмування. В режимі копання платформа повинна бути зафіксована в заданому положенні з метою запобігання її мимовільного обертання від неврівноважених щодо осі обертання сил, для чого в кінематичну схему приводу вводять гальмо.
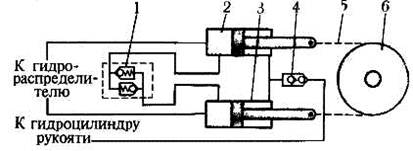
Для відкриття днища ковша застосовують канатні механізми. На Рис. 1, г представлена схема такого механізму для екскаватора з канатним натиском. Засув днища 8 ковша сполучений тяговим ланцюгом 32 з важелем 31, шарнірно закріпленим на рукояті 10. До важеля прикріплений канат 30, який, огинаючи блоки 29, 27 і 25, навивається на компенсуючий (напірний) барабан 14. Блоки 25 і 27 встановлені на важелі 26, який за допомогою пневмотовкача 28 може повертатися проти годинникової стрілки щодо шарніра А, натягуючи канат 30 і відкриваючи цим рухом днище ковша. Закривають днище в кінці опускання ковша на вихідну позицію різким гальмуванням підйомної лебідки.
Ходовий механізм включається в роботу рідко – тільки для пересування екскаватора на нову стоянку після відробітку елемента забою і у разі перебазування Екскаватора на новий будівельний майданчик. При цьому звичайно обмежуються малими швидкостями пересування. Більш високі швидкості використовують на машинах, часто міняючих робочі місця. Ще рідше працює стрілопідємний механізм. Його виконують у вигляді реверсивної лебідки з черв'ячним або іншим приводом, до складу якого входить спеціальна обгінна муфта, що оберігає від різкого падіння стріли, що може привести до аварії машини.
У разі одномоторного приводу передача руху окремим робочим механізмам здійснюється за допомогою зубчатих і ланцюгових пар. Для включення окремих кінематичних ланцюгів використовують фрикційні і кулачкові муфти. Наприклад, дисковою фрикційною муфтою 22 підключають до дизеля 21 головну передачу, що складається з ланцюгової передачі 23 і системи зубчатих коліс 24, 27 і 35. Для включення барабана 39 механізму підйому ковша і ланцюгової передачі 38 напірного механізму застосовують стрічкові фрикційні муфти 41 і 36 відповідно. Ківш фіксують на заданій висоті гальмом 40, а на заданому вильоті – гальмами 37. Опускається ківш гравітаційно після розгальмовування барабана 39. Для поворотного руху рукояті при відключеній муфті 36 спочатку кулачковою муфтою двосторонньої дії 31 включають ланцюгову передачу 30, а потім конусною фрикційною муфтою 28 – вал 29 підключають до головної передачі. Тими ж муфтами включають барабан 32 для підйому стріли. Утримують стрілу в заданому положенні гальмом 33, а опускають за рахунок гравітаційних сил після розгальмовування барабана 32 при включеній головній передачі. Частота обертання барабана 32 і, отже, швидкість опускання стріли обмежуються при цьому обгінною муфтою 42, з якою барабан 32 зв'язаний ланцюговою передачею 34.
Для обертання поворотної платформи щодо центральної цапфи 11 приводять в обертання шестерню 12, яка, оббігаючи навкруги жорстко сполученого з нижньою рамою зубчатого вінця 10, захоплює за собою поворотну платформу. Для цього включають кулачкову муфту 19 і відповідно напряму обертання платформи одну з конусних фрикційних муфт 25 або 26. Поворот платформи на розвантаження ковша звичайно виконують на зниженій швидкості, встановивши блок зубчатих коліс 15 і 16 у верхнє положення і ввівши в зачіпляюче зубчаті колеса 16 і 17, а поворот в забій – на підвищеній швидкості при зачіпляюче зубчатих коліс 15 і 14. Для роботи в гальмівному режимі використовують гальмо 18.
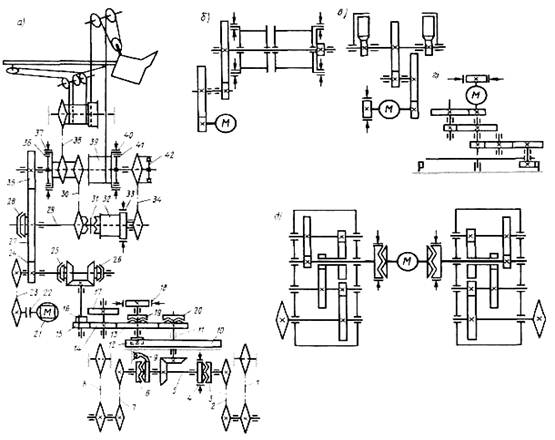
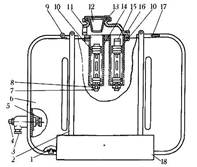
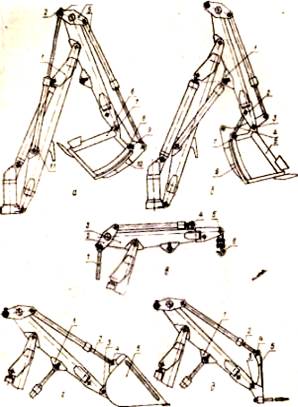
Рис. 3.2. Кінематична схема екскаватора:
а – одномоторного четвертої розмірної групи;
б…д – багатомоторного дизель-електричної сьомої розмірної групи.
У разі прямолінійного руху включають обидві кулачкові муфти 3 і 6 на валу 5, забезпечуючи передачу руху зірочкам гусеничних ланцюгів 1 і 8 за допомогою ланцюгових передач 2 і 7. Для зміни напряму руху одну з кулачкових муфт 3 або 6 відключають, унаслідок чого рух передаватиметься тільки одній зірочці гусеничного візка при зупиненій другій зірочці. Ходовий механізм обладнаний гальмом 4 і керованим стопорним пристроєм 9, що використовується як гальмо стоянки для утримування машини на похилих стоянках і запобігання її відкатування під час екскаваціонних робіт.
При багатомоторному приводі, особливо у разі індивідуального приводу кожного механізму окремим двигуном, кінематичні схеми істотно спрощуються. Наприклад, на дизель-електричному екскаваторі сьомої розмірної групи тільки два механізми – підйому ковша і підйому стріли – приводяться від одного електродвигуна (Рис. 3.2., б), вся решта механізмів має індивідуальний привід. Всі електродвигуни – реверсуючі, завдяки чому відпадає необхідність в механічному реверсі. Об'єднання механізмів підйому ковша і стріли в одну приводну групу обґрунтовано вельми рідкісним використовуванням стрілопідйомного механізму. Барабани цих механізмів посаджені на один вал і включаються роздільно фрикційними муфтами. Весь привід напірного механізму із зубчато-рейковими парами (Рис. 3.2. е) вмонтовується на стрілі, чим забезпечується його компактність.
Так само компактно, в зоні шестерні, що оббігає зубчатий вінець, встановлений на платформі механізм її повороту (Рис. 3.2., г). Ходовий механізм (Рис. 3.2., д) виконаний у вигляді двох чотириступінчастих редукторів, швидкохідні вали яких за допомогою кулачкових муфт підключені до електродвигуна, а тихохідні вали – до провідних зірочок гусеничного візка. При прямолінійному русі екскаватора до електродвигуна підключають обидва редуктори, а при поворотах один редуктор відключають і стопорять його гальмом.
Кожний з візків ходового пристрою може також приводитися в рух незалежно від іншої власним двигуном. В цьому випадку підвищується маневреність машини. Так, при включенні одного двигуна на пряме, а іншого на поворотний рух можна забезпечити розворот екскаватора на одному місці відносно власної осі. Недоліком роздільного приводу ходових візків є підвищена сумарна настановна потужність електродвигунів в порівнянні з приводом від одного двигуна. Цю потужність призначають з умови забезпечення поворотного руху тільки одним двигуном, тоді як другий двигун, що служить для приводу зупиненої гусениці, в цьому русі не бере участь. У разі ж приводу обох гусеничних візків одним електродвигуном при зупинці однієї гусениці вся його енергія прямує на привід другої, рухається гусениці.
Похожие работы

... ється безпосередньо від первинного двигуна до всіх механізмів за допомогою валів, шестерень, черв'ячних пар, ланцюгових і інших механічних передач (механічна трансмісія). Одноковшові екскаватори за призначенням ділять на три основні групи: будівельні універсальні, призначені для земляних і навантажувально-розвантажувальних робіт в будівництві; кар'єрні — для роботи в кар'єрах на розробці рудних і ...
... і для однієї родини. Причому, виходячи з різних факторів переважніше будівництво житлових приміщень саме з цегли. АТ «Будівельник» збувають силікатна цегла по всій Вінницькій області, займаючи близько 1/3 ринку збуту силікатної цегли. Тому що комбінат використовує для виробництва сировина вінницької області, транспортуючи його рейковим способом, знижуючи в такий спосіб питомі витрати і собіварті ...


... Рис. 2.3. Монтажні схеми робочого устаткування: а — зворотньої лопати; б — прямої лопати; в — кранової підвіски; г — ковша підвищеної місткості; д — вил. 2.2 Робоче обладнання екскаваторів 3-ї розмірної групи На гідравлічних екскаваторах зворотна лопата — один з основних видів змінного робочого устаткування. По конструктивній схемі зворотну лопату випускають декількох різновидів, але ...
... знаки , а у нічний час – сигнальне освітлення. Місця переходів людей через траншеї мають бути обладнані перехідними мостами, які освітлені в нічний час. 4.При виявленніп вибухонебезпечних матеріалів земляні роботи в цих місцях слід негайно припинити до отримання дозволу від відповідних служб. 5.Грунт, вийнятий з котловану, потрібно розміщувати на відстані не менше 0,5 м від броковки виїмки. ...
0 комментариев