Навигация
1. Введение
Промышленная электроника используется в различных отраслях народного хозяйства, науки и техники. Наряду с тенденцией автоматизации технологических и производственных процессов на базе вычислительной техники, современная промышленная электроника стала наиболее распространённой.
Базовой системой любой современной автоматической системы управления производственным процессом [4], является система автоматического контроля, позволяющая получать измерительную информацию о режимных параметрах процессов…
Научной основой систем автоматического контроля являются различные принципы измерений параметров технологических процессов, а технической базой этих систем служат средства измерений и преобразований соответствующих параметров, устройства для автоматизации производственных процессов, содержащие в себе ряд элементов, служащих для измерения параметров процесса. Этим элементом автоматической системы является датчик.
В настоящее время датчики разрабатываются во многих исследовательских и опытно-конструкторских организациях. Множество специалистов, в своей работе, сталкивается с выбором конкретных датчиков.
Разнообразие технологических процессов приводит к необходимости иметь широкий выбор датчиков, которые должны соответствовать требованиям, характерным для всех устройств автоматики. Они должны иметь: высокую чувствительность, точность, быстродействие, надёжность, прочность, сравнительно малые размеры и т.д.
Данный реферат включает в себя обзор шести датчиков угла поворота. Цель этого реферата – приобретение умения пользоваться патентной литературой, делая сравнительный анализ, давая экономическую оценку, навыков по оформлению технической литературы, а также приобретение способности анализировать процессы, происходящие в элементах устройства.
2. Описание конструкции датчиков
2.1 Датчик индукционный бесконтактный угла поворота
Формула изобретения.
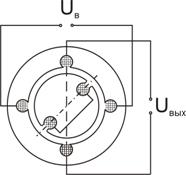
1. Индукционный бесконтактный датчик угла поворота [1], содержащий ферромагнитный статор с пазами на его внутренней поверхности, размещённую в паре его диаметрально расположенных пазов обмотку возбуждения, размещённую в его других пазах выходную обмотку и двухполюсный ферромагнитный ротор с длиной Т полюсной дуги, отличающийся тем, что, с целью расширения функциональных возможностей путём изменения вида его выходной характеристики в функции угла поворота ротора, пазы для размещения выходной обмотки расположены с угловым смещением ±g относительно диаметрально расположенных пазов с обмоткой возбуждения. 2. Датчик по п. 1, отличающийся тем, что, с целью повышения выходной характеристики в виде симметричной треугольной зависимости, полюсная дуга Т=p/2, а угловое смещение g=p/2.
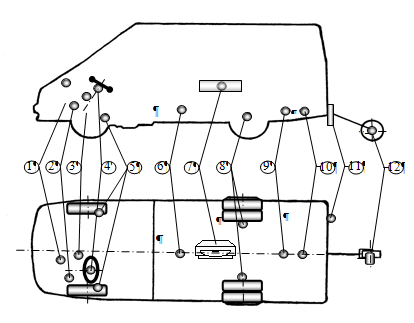
Датчик индукционный бесконтактный. Вид общий
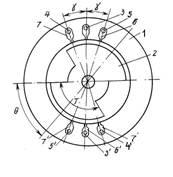
Рис. 1. 1 – ферромагнитный статор; 2 – двухполюсный ферромагнитный ротор; 3-5 и 3¢-5¢- пазы; 6, 6¢- обмотка возбуждения; 7, 7¢- выходная обмотка; Т – ширина полюсной дуги; g - угловое смещение пазов выходной обмотки относительно диаметрально расположенных пазов с обмоткой возбуждения; q - угол поворота ротора.
3. Датчик по п. 1, отличающийся тем, что, с целью повышения выходной характеристики в виде пилообразной зависимости с зоной нечувствительности G, полюсная дуга Т=p/2, а угловое смещение g=0,5(p/2-G).
4. Датчик по п. 1, отличающийся тем, что, с целью повышения выходной характеристики в виде трапецеидальной зависимости с длиной B плоского горизонтального участка, полюсная дуга Т=B +p/2, а угловое смещение g=p/2.
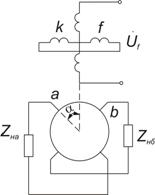
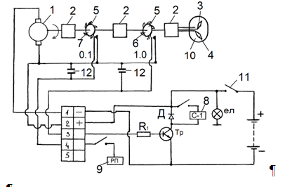
Принцип действия
При подключении обмотки возбуждения к источнику переменного напряжения (см. рис.3) начинает вращаться двухполюсный ферромагнитный ротор, который вызывает магнитную индукцию. С выходной обмотки снимают выходное напряжение(Uвых.), которое зависит от угла q поворота ротора, а также определяется конструктивными параметрами Т, g.Вывод: Изобретение относится к измерительно-преобразовательной технике, а именно к индукционным датчикам угла, выходное напряжение которых изменяется по требуемому закону при повороте ротора, и может найти применение в качестве первичных датчиков информации в аналоговых и дискретных системах. Данный датчик очень прост по конструкции и способен показывать разные выходные характеристики (треугольная, пилообразная и трапецеидальная зависимости). Датчик имеет относительную дешевизну при изготовлении. Выходное напряжение изменяется при повороте на угол q=p/2.
2.2 Датчик индукционный бесконтактный угла поворота с цилиндрическим ротором
Формула изобретения.
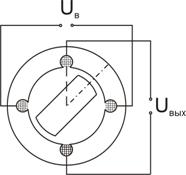
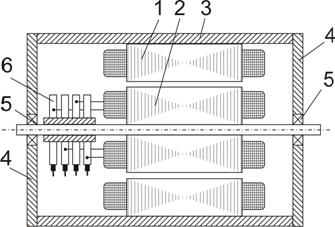
Индукционный бесконтактный датчик угла поворота [2], содержащий ферромагнитный ротор с Ш – образным поперечным сечением, размещённые на его среднем стержне две соединённые последовательно согласно катушки, образующие выходную обмотку, и явнополюсный ферромагнитный ротор, отличающийся тем, что, с целью упрощения конструкции, ротор выполнен цилиндрическим, полюса образуют на его поверхности выступ в виде одного витка винтовой спирали, статор установлен так, что его продольная ось симметрии, проходящая вдоль среднего стержня, параллельна оси ротора, а его длина равна удвоенной ширине полюсного выступа.
Датчик индукционный бесконтактный угла поворота с цилиндрическим ротором. Вид общий.
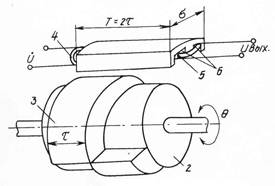
Рис. 2. 1 – статор; 2 – ротор; 3 – выступ ротора; 4 – первичная обмотка; 5 – вторичная обмотка; 6 – паз статора; t - длина полюса; d - ширина полюса; q - угол поворота ротора; Ů - переменное напряжение; Uвых. - выходное напряжение.
Принцип действия.
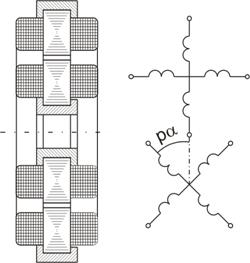
К источнику переменного напряжения подключается статор (см. рис.2). При этом соединённый с ним ротор начинает поворачиваться на угол q. В результате возникает магнитная индукция, которая вызывает в выходной обмотке статора ЭДС (выходное напряжение). Если статор в равной мере перекрывает парные части выходной обмотки, то Uвых.= 0. Рабочий диапазон углов поворота ротора равен 
Вывод: Изобретение относится к измерительно-преобразовательной технике, а именно к индукционным бесконтактным датчикам угла, предназначенным для преобразователя угла поворота ротора в электрическое напряжение, и может найти применение в качестве первичного датчика информации в аналоговых и дискретных (цифровых) системах. Датчик прост по конструкции и производству. Он относительно дешёвый. Парные части выходной обмотки соединены встречно. Один оборот ротора соответствует одному шагу винтового выступа, а распределение магнитной индукции зависит от угла q поворота ротора.
Похожие работы
... угла могут применяться различного типа устройства: потенциометрические, индукционные, емкостные, фотоэлектрические, пневматические, электромашинные и т. п. В настоящем курсовой работе рассматриваются кольцевые индукционные датчики угла (КИДУ). Основными достоинствами КИДУ являются [1]: 1. отсутствие механического контакта между подвижной и неподвижной частями датчика, вследствие чего при ...
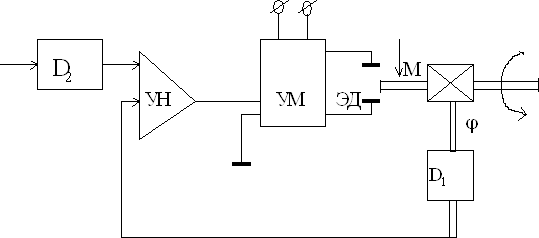
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...
... проведение погрузочно-разгрузочных работ и расширить возможности модульной комплектации ТС для транспортировки крупногабаритных грузов. Создание системы стабилизации ПКП является актуальной задачей. 2.1. Постановка задачи Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное ...

... и др., а также приобретен преподавателями ВУЗов ценный опыт ездовых испытаний автомобилей. 3. Оценка параметров устойчивости и управляемости АТС в стендовых условиях Устойчивость и управляемость АТС в значительной степени определяют активную безопасность автотранспортных средств (АТС) и, следовательно, общий уровень безопасности дорожного движения (БДД). В настоящее время международные и ...
0 комментариев