Навигация
Проектирование системы автоматического регулирования угла поворота вала электродвигателя
24567
знаков
2
таблицы
15
изображений
Министерство образования и науки Украины
Севастопольский Национальный Технический Университет
Кафедра Технической кибернетики
КУРСОВОЙ ПРОЕКТ
по курсу «Проектирование систем автоматического управления»
«Проектирование системы автоматического регулирования угла поворота вала электродвигателя»
Выполнила: ст. гр. А – 61з
Брусинов С. Э.
Проверил:
Дубовик С.А.
Оценка ________________
Дата «____»___________
Подпись _______________
Севастополь
2009
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
1 Настоящее техническое задание распространяется на разработку и испытание подсистемы автоматического регулирования угла поворота вала электродвигателя.
2 Основанием для разработки является рабочий план курса «Проектирование систем автоматического управления».
3 Технические требования
3.1 Состав системы и требования к конструктивному устройству
3.1.1 Основные части и их назначение:
Датчики (2 шт.) – преобразование угла поворота в электрическое напряжение;
Усилитель напряжения (1 шт.) – формирование ошибки регулирования;
Усилитель мощности (1 шт.) – усиление мощности сигнала, поступающего на двигатель;
Электродвигатель (1 шт.) – исполнительное устройство.
3.1.2 Габариты не должны превосходить размеров 300х200х400 (мм).
3.1.3 Масса не должна превосходить 20 (кг).
3.2 Требуемые показатели качества и точности
Ошибка воспроизведения полиномиального сигнала |e¥(t)| ![]() 0.06;
0.06;
Ошибка воспроизведения гармонического сигнала |eS| ![]() 0.06;
0.06;
Ошибка от помехи |eN| ![]() 0.5;
0.5;
Минимальная частота помехи ![]() = 310 (рад/c);
= 310 (рад/c);
Время регулирования tР![]() 2 (с);
2 (с);
Перерегулирование системы s ![]() 15%.
15%.
3.3 Номинальный режим работы
Момент инерции нагрузки ![]() = 0.5 (кг×м2);
= 0.5 (кг×м2);
Максимальная скорость вращения ![]() (рад/с);
(рад/с);
Максимальное значения ускорения движения нагрузки ![]() (рад/с2);
(рад/с2);
Максимальный статический момент сопротивления нагрузки ![]() (Н×м); Требования к надежности
(Н×м); Требования к надежности
Средний срок безотказной работы 10000 часов.
Возможность устранения неполадок, заменой основных частей и их элементов.
Условия эксплуатации
3.5.1 допускаемые кратковременные воздействия климатических факторов
Рабочий диапазон температур 00 С < t < 400 C;
Максимальное атмосферное давление 900 (мм рт. ст.);
Относительная влажность – 80% при температуре окружающей среды 200 C;
Механические воздействия
Постоянная перегрузка не более 10g;
Переменные перегрузки не более 5g;
Частота вибрации 2 Гц.
Затраты на проектирование неограниченны. Источники финансирования не определены.
Порядок испытаний и ввода в действие
5.1 Провести проверку и контроль параметров
Осуществить контроль сопротивлений и электрической прочности изоляции токоведущих цепей и обмоток электродвигателя;
Осуществить контроль нагрева обмоток или других частей электродвигателя;
Осуществить оценку возникающих при работе машин шумов и вибраций, а также радиопомех.
Осуществить проверку точности отработки заданного угла поворота
Провести ряд испытаний с измерением угла поворота j;
Убедиться в соответствии угла поворота j и заданного угла jЗАД.
Министерство образования и науки Украины
Севастопольский Национальный Технический Университет
Кафедра Технической кибернетики
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по курсу «Проектирование систем автоматического управления»
«Проектирование системы автоматического регулирования угла поворота вала электродвигателя»
Выполнила: ст. гр. А – 61з
Брусинов С. Э.
Проверил:
Дубовик С.А.
Оценка ________________
Дата «____»___________
Подпись _______________
Севастополь
2009
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
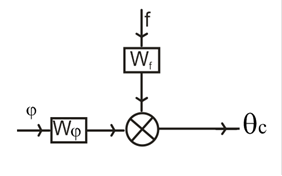
1 ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ СХЕМЫ СИСТЕМЫ
2 ВЫБОР И РАСЧЕТ ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА
2.1 Выбор двигателя
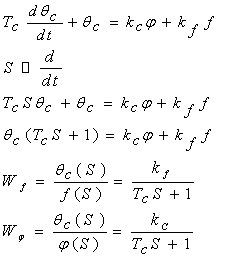
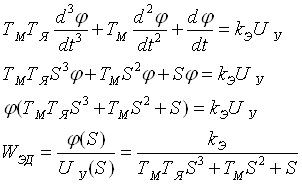
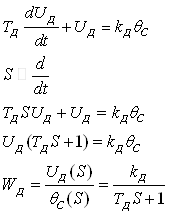
2.2 Расчет параметров передаточной функции двигателя
3 РАСЧЕТ РЕГУЛЯТОРА
4 РАСЧЕТ КОРРЕКТИРУЮЩЕГО ЗВЕНА
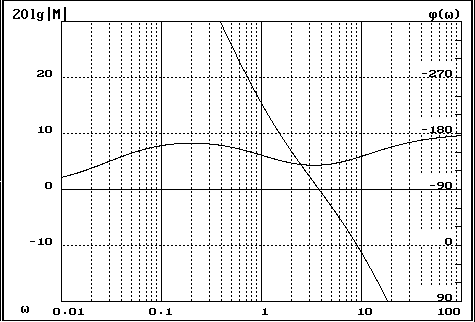
4.1 Получение характеристик желаемой ЛАЧХ
4.2 Построение амплитудно-частотных характеристик
4.3 Нахождение передаточной функции регулятора
4.4 Проверка устойчивости и качеств переходного процесса
5 РЕАЛИЗАЦИЯ КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА
ЗАКЛЮЧЕНИЕ
Список используемых источников
ВВЕДЕНИЕ
Системы автоматического регулирования применяются во многих областях современной техники: в авиационной и космической промышленности, для работы в подводных и морских средах, в наземной технике.
Синтез системы автоматического регулирования состоит в выборе структуры и параметров систем регулирования объектами, которые в соответствии с заданными техническими условиями обеспечивают наиболее рациональные характеристики по запасам устойчивости, показателям качества и точности. Сложности решения данной проблемы заключается в том, что при проектировании систем необходимо учитывать множество дополнительных факторов: надёжность функционирования, массу и габаритные размеры, стоимость, возможность работы при вибрации, в агрессивных средах, при значительных перепадах температуры и влажности.
Проектирование представляет собой процесс создания технической документации, опытных образцов и моделей объекта.
Существуют особенности САУ как объектов проектирования. В отличие от других объектов машиностроения и приборостроения, являющимися обычно отдельными устройствами, САУ представляет собой систему из устройств, работающих в режиме управления заданным объектом: объект управления (регулирования), регулятор, или управляющая часть, поддерживает требуемый режим работы объекта управления либо изменяет этот режим в соответствии с заданным законом или программой управления.
При этом большой вес приобретают такие проектные процедуры, как анализ устойчивости, качества и точности САУ, синтез регулятора, построение математических моделей объектов регулирования. При проектировании САУ существенное значение приобретает физическая разнородность и возмущающих воздействий.
Цели и критерии проектирования имеют исключительно важное значение, так как они определяют и направляют весь процесс проектирования. Срок проектирования устанавливается с учетом наискорейшего достижения цели создания САУ на мировом уровне.
В ходе выполнения курсовой работы нужно спроектировать систему автоматического регулирования угла поворота вала электродвигателя (ЭД). Объектом управления такой системы является вращающийся вал, нагруженный моментом ![]() . Цель управления состоит в обеспечении угла
. Цель управления состоит в обеспечении угла ![]() поворота вала ЭД, близкого к заданной величине
поворота вала ЭД, близкого к заданной величине ![]() , которая может изменяться во времени. Для достижения этой цели необходимо спроектировать систему с обратной связью.
, которая может изменяться во времени. Для достижения этой цели необходимо спроектировать систему с обратной связью.
Оценки качества и точности проектируемой системы должны удовлетворять техническому заданию.
Похожие работы
... управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном ...
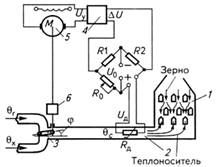
... и расширение знаний по теории автоматического управления, развитию навыков и применение современных инженерных навыков, в том числе и с применением ЭВМ при разработке и изучению реальных САУ. Система автоматического регулирование температуры теплоносителя зерносушилки На рис. 3 показана схема САР температуры теплоносителя, поступающего в шахтную зерносушилку 1 из камеры смешивания 2, которая ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... проведение погрузочно-разгрузочных работ и расширить возможности модульной комплектации ТС для транспортировки крупногабаритных грузов. Создание системы стабилизации ПКП является актуальной задачей. 2.1. Постановка задачи Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное ...
0 комментариев