Обзор методов анализа работы ШГНУ
Обзор и сравнительные характеристики нейрочипов
Разработка и описание работы структурной схемы
Фильтр нижних частот
Универсальный последовательный интерфейс
Расчет надежности
Расчет потребляемой мощности
Организационно-экономическая часть
Класс, 11.10.11 Добыча сырой нефти и нефтяного (попутного) газа 0,5%
Навигация
Диплом-Нейросетевая система для управления и диагностики штанговой глубинонасосной установкой
Диплом-Нейросетевая система для управления и диагностики штанговой глубинонасосной установкой
142162
знака
19
таблиц
29
изображений
Содержание
Техническое задание
Введение
1.Обзорная часть
1.1 Основные положения нейронных сетей
1.2 Обзор существующих систем управления ШГНУ
1.3 Обзор методов анализа работы ШГНУ
1.4 Обзор и сравнительные характеристики нейрочипов
2. Разработка и описание структурной схемы
3. Выбор и расчет блоков принципиальной схемы
3.1 Генератор тактовых импульсов
3.2 Цифро-аналоговый преобразователь
3.3 Усилитель напряжений
3.4 Фильтр нижних частот
3.5 Нейрочип
3.6 Оперативное запоминающие устройство
3.7 Постоянное запоминающие устройство
3.8 Универсальный последовательный интерфейс
3.9 Приемопередатчик
3.10 Расчет надежности
3.11 Расчет потребляемой мощности
4. Метрологическая часть
5. Технологическая часть
6. Организационно-экономическая часть
7. Безопасность и экологичность проекта
Заключение
Список литературы
Приложения
Ведомость документации
Перечень элементов
Патентная проработка
Техническое задание
Спроектировать систему для диагностики и управления штанговой глубиннонасосной установки со следующими техническими параметрами:
- надежность 0.95 за 10000ч;
- габариты 310х187х76 мм;
- потребляемая мощность, не более 3 Вт;
- температурный диапазон -50 …+ 50 ºС;
- погрешность, не более 1%.
Введение
Нефть и газ являются одними из основных видов топлива,потребляемого человечеством.Нефть добывают и используют сравнительно давно, однако начало интенсивной промышленной разработки нефтяных месторождений приходится на конец ХIХ-начало ХХ веков.
Конец ХХ столетия характеризуется резким увеличением спроса на нефть и газ и их потребления. В настоящее время около 70 % энергитической потребности в мире покрывается за счет нефти и газа.
В последнее время добыча нефти с помощью фонтанирующих скважин фактически прекратилась. Многие скважины, пробуренные на нефтеносные пласты, сразу после окончания бурения вводятся в эксплуатацию насосным способом. Непрерывно растет фонд малодебитных скважин (до 3т/сутки)
Мощность насосного оборудования на них в 4-5 раз превышает необходимую. В настоящее время в стоимости нефти эксплуатационные расходы на электроэнергию и обслуживание энергетического комплекса доходят до 45-50%. Процесс добычи нефти после геологических работ и бурения скважин начинается с выбора оборудования. Средний срок эксплуатации нефтяных скважин около 20 лет. За это время оборудование меняется несколько раз. Это объясняется не столько его физическим износом, сколько изменением дебита нефти. Когда дебит скважины становится менее 100 т/сут, устанавливается штанговая глубинно-насосная установка (ШГНУ) - станок-качалка. Есть скважины, на которых сразу после бурения устанавливаются станки-качалки. 75% скважин в России оборудованы ими. Если производительность насоса станка-качалки превышает нефтеотдачу скважины, то в настоящее время или меняют станок-качалку, или переводят ее в периодический режим работы. Причем кажущаяся экономия электроэнергии и моточасов работы оборудования при периодической эксплуатации скважин на самом деле приводит к увеличению удельного расхода электроэнергии на тонну добытой нефти и к усложнению условий эксплуатации оборудования.
Поэтому требования правильного выбора электрооборудования для нефтедобычи, автоматизация его работы, снижение затрат на эксплуатацию и ремонт оборудования являются весьма актуальными.
Интенсификация технологических процессов добычи, переработки и хранения нефти и нефтепродуктов вызывает необходимость дальнейшего совершенствования систем автоматизации нефтяных отраслей промышленности, что, в свою очередь, связано с обработкой большого объема измерительной информации. Этим объясняется широкое развитие измерительных информационных систем, предназначенных для сбора, преобразования, передачи, хранения, обработки на ЭВМ и представления в удобном для оператора виде различного рода технологической информации.
1.Обзорная часть
1.1 Основные положения нейронных сетей
Нейронная сеть является совокупностью элементов, соединенных некоторым образом так, чтобы между ними обеспечивалось взаимодействие. Эти элементы, называемые также нейронами или узлами, представляют собой простые процессоры, вычислительные возможности которых обычно ограничиваются некоторым правилом комбинирования входных сигналов и правилом активизации, позволяющим вычислить выходной сигнал по совокупности входных сигналов. Выходной сигнал элемента может посылаться другим элементам по взвешенным связям, с каждой из которых связан весовой коэффициент или вес. В зависимости от значения весового коэффициента передаваемый сигнал или усиливается, или подавляется. Элемент нейронной сети схематически показан на рисунке 1.1.-1
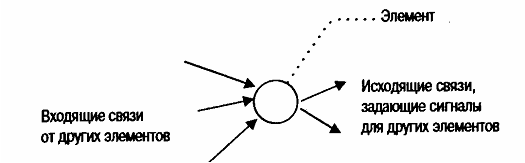
Рисунок 1.1.-1 Элемент нейронной сети.
Структура связей отражает детали конструкции сети, а именно то, какие элементы соединены, в каком направлении работают соединения и каков уровень значимости (т.е. вес) каждого из соединений. Задача, которую понимает сеть (или ее программа), описывается в терминах весовых значений связей, связывающих элементы. Структура связей обычно определяется в два этапа: сначала разработчик системы указывает, какие элементы должны быть связаны и в каком направлении, а затем в процессе фазы обучения определяются значения соответствующих весовых коэффициентов.
Весовые коэффициенты можно определить и без проведения обучения, но как раз самое большое преимущество нейронных сетей заключается в их способности обучаться выполнению задачи на основе тех данных, которые сеть будет получать в процессе реальной работы. Для многих приложений обучение является не только средством программирования сети, когда нет достаточных знаний о способе решения задачи, позволяющих выполнить программирование в традиционной форме, но часто единственной целью обучения является проверка того, что сеть действительно сможет научиться решать поставленные перед ней задачи.
С каждым процессором (т.е. обрабатывающим элементом сети) связывается набор входящих связей, по которым к данному элементу поступают сигналы от других элементов сети, и набор исходящих связей, по которым сигналы данного элемента передаются другим элементам. Некоторые элементы предназначены для получения сигналов из внешней среды (и поэтому называются входными элементами), а некоторые — для вывода во внешнюю среду результатов вычислений (и поэтому такие элементы сети называются выходными элементами). Любая вычислительная машина имеет хотя бы одно устройство ввода (например, клавиатуру), с помощью которого система получает данные из внешней среды, и устройство вывода (например, монитор), с помощью которого отображаются результаты вычислений. В случае программного моделирования реальных процессов на входные элементы обычно подаются уже предварительно подготовленные данные из некоторого файла данных, а не от непосредственно связанных с внешней средой датчиков.
Структура связей.
Структура связей отражает то, как соединены элементы сети. В одной модели (т.е. для одного типа сетей) каждый элемент может быть связан со всеми другими элементами сети, в другой модели элементы могут быть организованы в некоторой упорядоченной по уровням (слоям) иерархии, где связи допускаются только между элементами в смежных слоях, а в третьей могут допускаться обратные связи между смежными слоями или внутри одного слоя, или же допускаться посылка сигналов элементами самим себе. Возможности здесь практически бесконечны, но обычно для каждой конкретной модели сети указывается тип допустимых связей. Каждая связь определяется тремя параметрами: элементом, от которого исходит данная связь, элементом, к которому данная связь направлена, и числом (обычно действительным), указывающим весовой коэффициент (т.е. вес связи). Отрицательное значение веса соответствует подавлению активности соответствующего элемента, а положительное значение — усилению его активности. Абсолютное значение весового коэффициента характеризует силу связи.
Строение нейрона.
Одним из основных достоинств нейровычислителя является то, что его основу составляют относительно простые, чаще всего, однотипные элементы, имитирующие работу нейронов мозга. Каждый нейрон характеризуется своим текущим состоянием по аналогии с нервными клетками головного мозга, которые могут быть возбуждены или заторможены. Он обладает группой синапсов — однонаправленных входных связей, соединённых с выходами других нейронов, а также имеет аксон — выходную связь данного нейрона, с которой сигнал (возбуждения или торможения) поступает на синапсы следующих нейронов. Общий вид нейрона приведён на рисунке 1.1.-2.
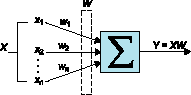
Каждый синапс характеризуется величиной синаптической связи или её весом wi, который по физическому смыслу эквивалентен электрической проводимости. Текущее состояние нейрона определяется как взвешенная сумма его входов:
![]()
Выход нейрона есть функция его состояния: y = f(s) (2), которая называется активационной. Известны различные виды таких функций, некоторые из которых представлены на рис. 2. Одной из наиболее распространённых является нелинейная функция с насыщением, так называемая сигмоидальная (логистическая) функция:
![]()
При уменьшении a сигмоид становится более пологим, вырождаясь в пределе при a = 0 в горизонтальную линию на уровне 0,5; при увеличении a сигмоид приближается по внешнему виду к функции единичного скачка с порогом T в точке x = 0. Из выражения для сигмоида очевидно, что выходное значение нейрона лежит в диапазоне [0,1]. Одно из ценных свойств сигмоидной функции — простое выражение для её производной:
![]()
Параллелизм обработки достигается путём объединения большого числа нейронов в слои и соединения определённым образом различных нейронов между собой. В качестве примера простейшей НС приведём трёхнейронный персептрон (рисунок 1.1.-3), нейроны которого имеют активационную функцию в виде единичной пороговой. На n входов поступают некие сигналы, проходящие по синапсам на 3 нейрона, образующие единственный слой этой НС и выдающие три выходных сигнала:
![]()
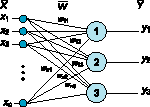
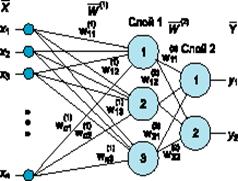
Очевидно, что все весовые коэффициенты синапсов одного слоя нейронов можно свести в матрицу W, в которой каждый элемент wij задаёт величину i-ой синаптической связи j-ого нейрона. Таким образом, процесс, происходящий в НС, может быть записан в матричной форме: Y = F(XW), где X и Y — соответственно, входной и выходной сигнальные векторы, F(V) — активационная функция, применяемая поэлементно к компонентам вектора V. Теоретически число слоёв и нейронов в каждом слое может быть произвольным. Рассматривая классификацию НС, можно выделить: бинарные (цифровые) и аналоговые НС, предварительно обученные (неадаптивные) и самообучающиеся (адаптивные) нейронные сети, что крайне важно при их аппаратной реализации. Бинарные оперируют двоичными сигналами, и выход каждого нейрона может принимать только два значения: 0 либо 1.По топологической классификации НС во внимание принимается число слоёв и связей между ними. На рисунке 1.1.-4 представлен двухслойный персептрон , полученный из однослойного путём добавления второго слоя, состоящего из двух нейронов. При этом нелинейность активационной функции имеет конкретный смысл: если бы она не обладала данным свойством или не входила в алгоритм работы каждого нейрона, результат функционирования любой p-слойной НС с весовыми матрицами W (i), i = 1,2,...p для каждого слоя i сводился бы к перемножению входного вектора сигналов X на матрицу W (S) = W (1)*W (2)*...*W (p), то есть фактически такая p-слойная НС эквивалентна однослойной с весовой матрицей единственного слоя W (S): Y = XW (S).
Одним из самых важных этапов разработки нейровычислителя является обучение нейронной сети. От качества обучения зависит способность сети решать поставленные перед ней задачи. На этапе обучения кроме параметра качества подбора весовых коэффициентов, важную роль играет время обучения. Как правило, эти два параметра связаны обратной зависимостью, и их приходится выбирать на основе компромисса. Обучение НС может вестись с учителем или без него. В первом случае, сети предъявляются значения как входных, так и желательных выходных сигналов, и она по некоторому внутреннему алгоритму подстраивает веса своих синаптических связей. Во втором случае, выходы НС формируются самостоятельно, а веса изменяются по алгоритму, учитывающему только входные и производные от них сигналы.
Существует великое множество различных алгоритмов обучения, которые можно разделить на два больших класса: детерминированные и стохастические. В первом из них подстройка весов представляет собой жёсткую последовательность действий, во втором — производится на основе действий, подчиняющихся некоторому случайному процессу. Практически 80% реализованных на сегодня нейрочипов, ориентированных на задачи цифровой обработки сигналов, используют при обучении НС алгоритм обратного распространения ошибки.
Обучение по алгоритму обратного распространения ошибок.
На протяжении многих лет не знали правила, которое можно было бы использовать для корректировки весов многослойной сети в процессе управляемого обучения. Правило корректировки весов, о котором идет речь, называется алгоритмом обратного распространения ошибок. Алгоритм обратного распространения определяет два потока в сети: прямой поток от входного слоя к выходному и обратный поток — от выходного слоя к входному. Прямой поток продвигает входные векторы через сеть, в результате чего в выходном слое получаются выходные значения сети. Обратный поток подобен прямому, но он продвигает назад по сети значения ошибок, в результате чего определяются величины, в соответствии с которыми следует корректировать весовые коэффициенты в процессе обучения. В обратном потоке значения проходят по взвешенным связям в направлении, обратном направлению прямого потока. Например, в прямом потоке элемент скрытого слоя посылает сигналы каждому элементу выходного слоя, а в обратном потоке элемент скрытого слоя будет получать сигналы ошибок от каждого элемента выходного слоя.
В процессе обучения каждый входной образец будет иметь соответствующий целевой выходной образец, который должен получаться для данного входного.
В общем, целью обучения является нахождение такого набора весовых коэффициентов сети, который обеспечивает решение данной конкретной проблемы. Перед началом обучения весовые коэффициенты устанавливаются равными малым случайным значениям — например, значениям из диапазона от -0.3 до 0.3. Коротко говоря, сети предъявляется образец и вычисляется вектор ошибок, в результате чего выясняется, насколько следует изменить значения весов; процесс повторяется для каждого образца. Полный цикл рассмотрения всех имеющихся образцов называется эпохой. Все образцы подаются на рассмотрение ее снова и снова, эпоха за эпохой, пока на протяжении одной эпохи все значения реального вывода для каждого образца не попадут в допустимые рамки.
1.2.Обзор существующих систем управления ШГНУ
В последние годы созданы вполне работоспособные приборы и целые комплексы, позволяющие регистрировать результаты динамометрирования в электронной памяти этих устройств с последующей (или одновременной) обработкой их на электронно-вычислительных машинах. Программно-математическое обеспечение (ПМО) каждого комплекса имеет свое оформление, требования к исходным данным и используемые методики их обработки.
Рассмотрим системы управления ШГНУ.
Комплексная система исследования работы скважин "Анализатор".
Данная система разработана американской компанией "Есhоmеtег". Она представляет собой комплекс измерительных датчиков. Управление их работой и обработка получаемой информации производятся компьютером совместно с аналого-цифровым преобразователем. Такая система осуществляет обработку данных акустических микрофонов, датчиков давления и нагрузки, акселерометров, датчиков тока двигателя, тахометров и других измерительных устройств.
Для измерения уровня жидкости в кольцевом пространстве скважины акустическим методом эта система используется совместно с генератором импульсов, микрофоном и датчиком давления. Эти измерения используются для определения забойного давления работающей эксплуатационной скважины. А знание пластового давления и использование модели притока жидкости, с учетом определенного анализа, позволяют определять эффективный дебит скважины.
На скважинах со штанговым глубинно-насосным оборудованием данная система применима для динамометрических исследований с измерением нагрузок на полированном штоке, ускорения движения полированного штока и потребляемого двигателем электрического тока. Измерение нагрузок на полированном штоке возможно двумя способами (в зависимости от решаемой задачи).
1. Для количественного динамометрического анализа необходимы данные высокой степени точности, которые можно получить с помощью подковообразного калиброванного датчика, измеряющего механическое напряжение. Он устанавливается между траверсами канатной подвески исследуемой скважины.
2. Для получения качественной информации, позволяющей судить об эффективности работы насоса и выявлять (диагностировать) некоторые неисправности подземного оборудования, используется С-образный облегченный датчик, прикрепляемый при помощи зажима непосредственно к полированному штоку. Датчик замеряет изменение нагрузки на штангах путем замера изменения диаметра полированного штока. Если коэффициент Пуассона для стали равен примерно 0,3, то радиальное напряжение составит около ЗОУ0 от осевой нагрузки.
В обоих случаях для определения перемещения полированного штока используется очень компактный акселерометр на интегральной схеме, который встроен в датчик измерения нагрузки. Таким образом, необходим только один кабель для соединения компьютера и датчика нагрузки. Скорость движения полированного штока является результатом интегрирования сигнала ускорения акселерометра, а повторное интегрирование дает значение положения полированного штока как функции времени. Благодаря высокой скорости обработки информации компьютером, применяемым в комплексе систем "Анализатор", данные динамометрии появляются на экране сразу по мере измерения. В отдельном окне представляется график потребления электрического тока двигателем станка-качалки: анализ потребления электрического тока дает представление об уравновешенности станка-качалки.
Примеры графиков, получаемых при исследовании скважин с помощью комплексной системы "Анализатор", приведены на рисунке 1.2-1
1 — зависимость нагрузки на полированном штоке от положения балансира СКН (несколько циклов);
2 — зависимость нагрузки на полированном штоке от времени;
3 — зависимость нагрузки на полированном штоке от положения балансира СКН;
4 — зависимость тока электродвигателя привода СКН от времени;
5 — зависимость нагрузки на плунжере насоса от положения балансира СКН.
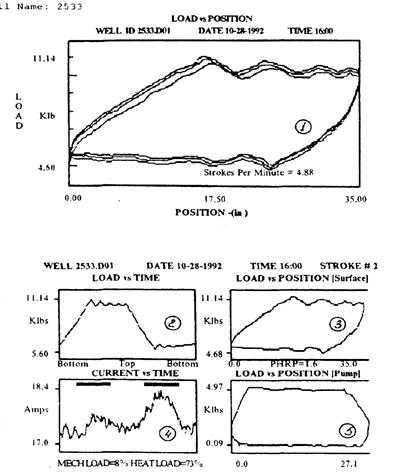
Рисунок 1.2-1 Примеры графиков, получаемых при исследовании скважин с помощью комплексной системы "Анализатор".
Комплекс СТК РНК-ЛЭП.
Система предназначена для телеуправления, телеизмерений и телесигнализации нефтяных скважин и других объектов добычи и первичной переработки нефти. Система в своем составе имеет:
- диспетчерский пункт (ДП);
- станции управления центральные (СУЦ) на распределительных подстанциях напряжением 110-35/6(10) кВ (РП);
- станции управления контролируемых пунктов (СУ КП).
На рисунке 1.2.-2 показано размещение элементов СТК РНК-ЛЭП на объектах нефтепромысла и их взаимодействие с объектами управления.
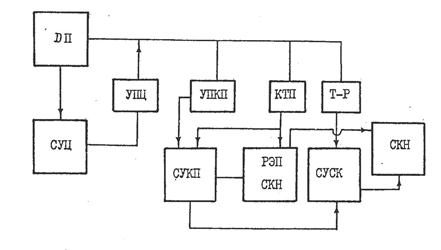
Рисунок 1.2.-1 Схема СТК РНК-ЛЭП
ДП - диспетчерский пункт, СУЦ - станция управления центральная, УПЦ, УПКП - устройства присоединения, КТП, Т-Р - комплектная трансформаторная подстанция, трансформатор, СУКП - станция управления контролируемого пункта, СУ СК - станция управления и защиты СКН при работе без РЭП СКН.
Конструктивно станции управления СТК РНК-ЛЭП представляют собой шкафы, в которых размещены кассеты с блоками. Диспетчерский пункт СТК РНК-ЛЭП оборудован ИЗМ-совместимым компьютером. Станции управления контролируемых пунктов устанавливаются на объектах телеуправления. СУ КП, имеющие проводные линии связи с диспетчерским пунктом НГДУ (СУ РП, КНС и др.), подключаются к ДП непосредственно, удаленные СУ КП подключаются к ЛЭП с помощью конденсаторного устройства присоединения и используют их в качестве физических линий связи с распределительной подстанцией 6(10) кВ (РП) и затем через СУЦ связываются с ДП. Принципиально возможно использование радиоканала для организации связи ДП-СУ КП.
Станции управления центральные на РП 35/6(10) кВ обеспечивают ретрансляцию команд и запросов диспетчерского пункта и ввод сигнала в ЛЭП через устройство присоединения к сборным шинам 6(10) кВ, а также прием и ретрансляцию данных от контролируемых пунктов, подключенных к ЛЭП. Связь ДП-СУЦ - проводная, по выделенной паре или с частотным уплотнением телефонной линии диспетчерской связи с подстанцией 35/6(10) кВ.
Технические возможности станций управления СТК РНК-ЛЭП позволяют осуществлять телесигнализацию и телеуправление (ТС и ТУ):
- станками-качалками (СКН);
- групповыми замерными установками (ГЗУ);
- кустовыми насосными станциями (КНС);
- распределительными подстанциями напряжением 110-35/6(10) кВ, РП),- другими объектами нефтедобычи и первичной переработки нефти. Примером функций ТС и ТУ могут служить следующие: включение, выключение и регулирование скорости качаний головки балансира станка-качалки, контроль потребляемой мощности, формирование ваттметрограммы двигателя, динамограммы станка-качалки, контроль количества откачиваемой жидкости, превышения давления в выкидном трубопроводе, несанкционированного доступа в СУ.
Станции управления КП позволяют оперативному персоналу связаться по телефонному каналу с диспетчером НГДУ. Программные средства СТК РНК-ЛЭП позволяют вести архивы накопленных (контролируемых параметров, ваттметрграмм, динамограмм и др.), составлять отчеты.
Устройство для диагностирования состояния скважинного глубиннонасосного оборудования (патент).
Устройство используется в области нефтедобычи. Предназначено для автоматического сбора, анализа и хранения информации о работе скважин, оборудованных штанговыми глубиннонасосными установками (ШГНУ), а также электроцентробежными насосами (ЭЦН).
Схема устройства для диагностирования состояния скважинного глубиннонасосного оборудования представлена на рисунке 1.2-3
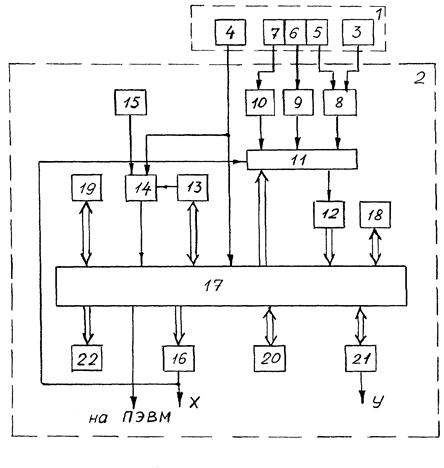
Рисунок 1.2.-3 Схема устройства для диагностирования состояния скважинного глубиннонасосного оборудования.
Для проведения диагностирования технического состояния штанговой глубиннонасосной установки все датчики устанавливают в соответствующем месте на дневной поверхности скважины, выходы датчиков подключают к входу вторичного прибора, на соответствующие тракты измерения блока регистрации 2.
Режим работы устройства выбирают с помощью клавиатуры 18. Запись информации о техническом состоянии ШГНУ производят в течение одного или кратного количества циклов работы установки. Рабочий цикл определяют по интервалу времени между двумя "мертвыми" точками положения балансира ШГНУ.
При снятии динамограммы, характеризующей работу насоса, в блоке регистрации 2 в оперативно-запоминающем устройстве 20 задается область, в которую будет заноситься информация о работе насоса, а также заносятся данные: N куста, N скважины, длина хода и период хода полированного штока. Затем запускают отсчет времени в блоке временной задержки 13, после чего запускают станок-качалку на несколько периодов, полированный шток при этом совершает возвратно-поступательное движение, как следствие - датчики усилия 3 и хода 4 полированного штока начинают формировать сигналы. По истечении времени задержки, после того, как ШГНУ вошла в установившийся режим работы, автоматически или с дистанционного пульта оператора запускается режим измерения, и сигнал с датчика усилий 3 поступает на усилитель 8 и далее через мультиплексор 11, который осуществляет коммутацию имеющихся аналоговых сигналов, - на вход аналого-цифрового преобразователя 12, а с него - на порт микропроцессорного контроллера 17. В это же время сигнал с датчика положения 4 также поступает на вход микропроцессорного контроллера 17 и на вход блока запуска измерений 14. При этом датчик положения 4 установлен на полированном штоке станка-качалки таким образом, чтобы синхронизирующий сигнал запуска измерения микропроцессорного контроллера 17 вырабатывался в блоке запуска измерений 14 только тогда, когда канатная подвеска находится в крайнем нижнем положении. По этому сигналу контроллер 17 начинает измерять время одного качания и усилие между траверсами подвески штанг. Обработка постоянно поступающей в цикле измерения информации о времени и усилии осуществляется в контроллере 17 в соответствии с заданной программой, поступающей из программного блока управления 19. После прихода с датчика положения второго синхронизирующего сигнала по цепи датчик положения 4 - блок запуска измерений 14 - контроллер 17 - генератор 16 синусоидальных колебаний информация автоматически выводится на графический индикатор 22, заносятся в память оперативно-запоминающего устройства 20 все необходимые уровни нагрузок и единичная динамограмма. При этом развертка динамограммы по оси X осуществляется по сигналу с генератора синусоидальных колебаний 16, период колебаний которого соответствует периоду одного качания. На экране графического индикатора 22 отображается одиночная динамограмма (фиг. 2), по которой определяют вес штанг Pшт, вес штанг плюс жидкости Pш+ж, минимальный (Pmin) и максимальный (Pmax) вес штанг, а также длину хода. Значения нагрузок в цифровом виде заносятся в протокол промысловых испытаний с фактическими нагрузками за период одного цикла. По полученной одиночной динамограмме в соответствии с программой, заданной программным блоком управления 19, автоматически прямо на скважине рассчитываются величина среднего дебита, утечки в клапанах насоса, производительность насоса.
Системы контроля за состоянием глубинно-насосного оборудования " СИДДОС".
Программно-аппаратный комплекс "СИДДОС", разработанный Томским НПО "СИАМ", предназначен для контроля и измерения рабочих характеристик штанговых глубинных насосов: силовых нагрузок в различных положениях полированного штока, длины хода, числа качаний, наличия утечек в глубинном оборудовании, динамограммы работы насоса. Данные измерений записываются в энергонезависимую память электронного блока и далее могут быть:
— выведены на термопечатающее устройство в виде динамограммы и цифрового отчета;
— переданы в компьютерную базу данных по проведенным исследованиям.
Телединамометрическая система контроля, разработанная Московским нефтяным институтом, представляет собой датчики усилия и перемещения, стационарно устанавливаемые на балансире СКН. Система фиксирует деформацию балансира в процессе работы СКН, пропорциональную возникающим в глубинном оборудовании нагрузкам. Информация о состоянии глубинного оборудования регистрируется в процессе обхода скважин путем подключения вторичного электронного прибора к штепсельному разъему стационарного датчика с последующей передачей в компьютер и созданием необходимой базы данных. При наличии кабельной или радиосвязи система предусматривает возможность дистанционного контроля за состоянием глубинного оборудования централизованно, с пульта диспетчера.
0 комментариев