Навигация
Построение диаграммы приведенного момента сил сопротивления
10996
знаков
5
таблиц
8
изображений
5. Построение диаграммы приведенного момента сил сопротивления
![]()
Определение точки приложения и направление уравновешивающей силы (приведенной силы)
Для определения полюса зацепления ![]() в зубчатой передаче, принять радиус делительной окружности ведомого колеса 2
в зубчатой передаче, принять радиус делительной окружности ведомого колеса 2 ![]()
![]() .
.
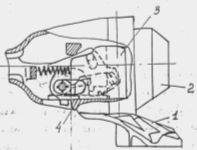
Выделить более четкими линиями один из планов механизма на рабочем ходу (где действует сила полезного сопротивления), но не крайние положения. Для этого положения пронумеровать звенья и обозначить кинематические пары и центры масс звеньев. Нумерацию планов положений начать с крайнего положения перед рабочим ходом.
Определяем радиус делительной окружности ведомого колеса
![]()
Принимаем r2=0,09 м, используя масштаб ![]() , определим масштаб на плане механизма:
, определим масштаб на плане механизма:
На плане механизма находится точка полюса зацепления (т. р0), а также направ-ление уравновешивающей силы (приведенной силы и ее точки приложения т. В2)

Используя теорему подобия находим положения и скорость т. В2на планах скоростей в каждом положении:
![]()
| Пара- метры | Положения | |||||||||
| 1 | 2 | Основное | 4 | 5 | 6 | 7 | 8 | 9 | ||
| pvb2мм | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | |
| ab2мм | 105 | 110 | 106 | 82 | 46 | 38 | 17 | 22 | 55 | |
| VB2 м/с | 2.2 | 2.2 | 2.2 | 2.2 | 2.2 | 2.2 | 2.2 | 2.2 | 2.2 | |
Определение силы полезного сопротивления по диаграмме сил и силы тяжести звеньев в каждом положении и прикладывание его к механизму
Определяем силы тяжести:
![]()
![]()
![]()
![]()
Значение сил полезного сопротивления и сил тяжести звеньев во всех положениях механизма одинаковы, кроме 1-ого и 7-ого, где F=0
Силы проставляются только в выделенном положении.
Согласно теоремы Жуковского «О жестком рычаге», перенести все силы из плана механизма на план скоростей повернув их на 900 в том числе ![]() .
.
Взять сумму моментов всех сил относительно pvи найти величину, направление ![]() .
.
![]()

Уравновешивающий момент:
![]()
Поскольку приведенная сила сопротивления ![]() и приведенный момент сопротивления
и приведенный момент сопротивления ![]() то имеем значения приведенных моментов сил сопротивления. Каждый момент заносим в таблицу
то имеем значения приведенных моментов сил сопротивления. Каждый момент заносим в таблицу
Таблица 3 – Приведенные значения моментов сил полезного сопротивления
| Положения | 1 | 2 | Основное | 4 | 5 | 6 | 7 | 8 | 9 |
|
| 0 | 19,5 | 31,4 | 46 | 33 | 25,9 | 0 | 15,9 | 10 |
По значениям ![]() в таблице строим график
в таблице строим график ![]() на миллиметровке.
на миллиметровке.
Определение мощности электродвигателя и разбивка передаточного отношения по ступеням. Определив ![]() для каждого положения строим график изменения приведенного момента сил сопротивления от функции угла поворота звена приведения по оси абсцисс, масштаб равен:
для каждого положения строим график изменения приведенного момента сил сопротивления от функции угла поворота звена приведения по оси абсцисс, масштаб равен:

![]()
Имея зависимость ![]() определяем требуемую мощность электродвигателя, для этого находим работу сил сопротивления:
определяем требуемую мощность электродвигателя, для этого находим работу сил сопротивления:
![]() ,
,
где S – площадь, мм2
Тогда работа движущих сил:
 ,
,
где Ag – полезная работа механизма, ![]()
Средняя мощность движущих сил:

Требуемая мощность электродвигателя:  ,
,
где ![]()
![]() КПД зубчатой передачи,
КПД зубчатой передачи, ![]() - цилиндрическая передача
- цилиндрическая передача
![]() - КПД ременной передачи,
- КПД ременной передачи, ![]()
![]() - КПД одной пары подшипников качения,
- КПД одной пары подшипников качения, ![]()
![]() количество пар подшипников качения
количество пар подшипников качения

По ГОСТ 19523–81 выбираем ![]() , причем
, причем ![]() , согласно
, согласно ![]() выбираем синхронную частоту вращения
выбираем синхронную частоту вращения ![]() , процент скольжения S. Соответственно выбрали:
, процент скольжения S. Соответственно выбрали:
![]() =0,55 кВт,
=0,55 кВт, ![]() =1500 об/мин, S=7,3%
=1500 об/мин, S=7,3%
Определяем номинальное число оборотов электродвигателя:
![]()
![]()

Определяем передаточное число, общее:
где ![]() - передаточное число редуктора, выбираем по ГОСТ 2185–66
- передаточное число редуктора, выбираем по ГОСТ 2185–66
Up – передаточное число ременной передачи
![]() радиус делительной окружности шестерни
радиус делительной окружности шестерни

Построение диаграммы изменения кинетической энергии
Имея диаграмму ![]() сил сопротивления
сил сопротивления ![]() графически проинтегрируем ее методом хорд и получим график работы сил сопротивления
графически проинтегрируем ее методом хорд и получим график работы сил сопротивления ![]() . Масштаб графика получим вычисляя по формуле:
. Масштаб графика получим вычисляя по формуле:
![]() ,
,
где ![]() масштаб
масштаб ![]()
![]() масштаб оси
масштаб оси ![]()
Н – полюсное расстояние при графическом интегрировании, мм
Приведенный момент движения сил для промышленных установок принимаем постоянным в течение всего цикла установившегося режима. Учитывая то обстоятельство, что за полный цикл установившегося движения работа движущих сил равна работе сил сопротивления. Соединяем 1-ую и последнюю точки в диаграмме ![]() прямой линией. Указанная прямая в положительной области представляет собой диаграмму работ движущих сил
прямой линией. Указанная прямая в положительной области представляет собой диаграмму работ движущих сил ![]() . Вычитая из ординат диаграммы
. Вычитая из ординат диаграммы ![]() соответствующие ординаты диаграммы
соответствующие ординаты диаграммы ![]() и откладывая разность на соответствующей ординате получаем диаграмму изменения (приращения) кинетической энергии механизма
и откладывая разность на соответствующей ординате получаем диаграмму изменения (приращения) кинетической энергии механизма ![]()
Определение истинной скорости движения звена приведения
Построение диаграммы приведенного момента инерции по уровню:
Определяем значения приведенного момента инерции в каждом положении:

Результат заносим в таблицу.
Таблица 4 – Значения приведенных моментов инерции
| Положение | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
| 0,15 | 0,25 | 0,43 | 0,52 | 0,39 | 0,3 | 0,15 | 0,32 | 0,86 |
По полученным значениям строим график изменения приведенного момента инерции от функции угла поворота звена приведения ![]() .
.
Масштаб ![]()
Построение диаграммы «Энергия – масса» (кривой Виттенбауэра) и зависимости
![]()
Исключив из графиков ![]() и
и ![]() аргумент φ получим функциональную зависимость изменения приращения к кинетической энергии от приведенного момента инерции
аргумент φ получим функциональную зависимость изменения приращения к кинетической энергии от приведенного момента инерции ![]() - диаграмму Виттенбауэра.
- диаграмму Виттенбауэра.
Кинетическая энергия механизма в любой момент времени можно представить в виде суммы кинетической энергии механизма в начальный момент времени ![]() и разности работ сил движущих Agи сил сопротивления Aс за время соответствующее повороту звена приведения на угол φ, т.е.
и разности работ сил движущих Agи сил сопротивления Aс за время соответствующее повороту звена приведения на угол φ, т.е.
![]()
Переносим начало координат графика ![]() на расстояние соответствующее значению кинетической энергии
на расстояние соответствующее значению кинетической энергии ![]() .
.
В этом случае диаграмма Виттенбауэра отнесенная к новой системе координат, представляет кривую изменения кинетической энергии всего механизма функции приведенного момента инерции ![]()
Истинная скорость звена приведения в данном его положении:
![]() (1)
(1)
Взяв на кривой ![]() произвольно выбрав точку с координатами (х, у) и определив значение:
произвольно выбрав точку с координатами (х, у) и определив значение:
![]()
![]()
После подстановки в формулу (1) получим:
 (2)
(2)
Полученные данные ![]() заносим в таблицу.
заносим в таблицу.
Таблица 5-Значения истинной скорости движения звена приведения
| Положение | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
|
По значениям таблицы строим диаграмму изменения истинной скорости движения звена приведения ![]() .
.
Из нового начала координат т. О1 касательно к диаграмме ![]() проводим
проводим
Лучи и находим лучи ![]() , тогда по формуле (2) находим
, тогда по формуле (2) находим ![]() ,
,![]() . Угловые
. Угловые
Скорости звена приведения:
![]()
Похожие работы





... расчет На рисунке 25 представлен результат термодеформационного расчета. Рисунок 25 – Контурное представление результата термодеформационного расчета 5. Расчет экономического эффекта от модернизации поперечно – строгального станка мод. 7307 5.1 Исходные данные для расчета экономического эффекта от модернизации Проведенная модернизация поперечно-строгального станка мод. 7307 ...
... шпинделей в блоках может быть выполнена по фуговально-рейсмусовой или двухрейсмусовой схеме. Двухблоковая схема четырехстороннего станка может быть дополнена горизонтальными и вертикальными шпинделями для обработки профильных поверхностей на заготовке или ее деления на кратные элементы. Станки снабжены вальцовым или конвейерно-вальцовым механизмом подачи. Фрезерные станки. Фрезерные станки ...
... возможность поэтапного развития производства создают хорошие условия для старта. Купив только один ленточный станок, можно получать обрезную доску экспортного качества. Данная технология незаменима при глубокой обработке древесины с получением точных по геометрии заготовок для клееного бруса, щита и мебельных заготовок. Особенно заметно преимущество ленточных станков при распиловке крупномерного ...
... износы при перемещении вагонов, исключить возможность саморасцепов и увеличить межремонтные сроки. 4. БЕЗОПАСНОСТЬ И ЭКОЛОГИЧНОСТЬ РЕШЕНИЙ ПРОЕКТА 4.1 Обеспечение безопасности работ на контрольном пункте автосцепки Ремонт пассажирских вагонов производят в вагонном депо, специализирующимся на ремонте цельнометаллических вагонов, в соответствии с руководством и инструкциями по деповскому ...
0 комментариев