Навигация
При прокладке используются только ecdis-карты;
29444
знака
0
таблиц
0
изображений
3. При прокладке используются только ecdis-карты;
4. Ecdis-карты откорректированы по дату использования (приведены па уровень современности).
В случае невыполнения любого из этих требований на судне должен быть комплект откорректированных бумажных карт. При нарушении только второго требования разрешается использовать электронную прокладку без дублирования ее графической прокладкой
на бумажной карте.
Ключевые положения эффективного использования ECDIS.
Выделяют три основные аспекта, обеспечивающие эффективность
ECDIS:
- Использование точных откорректированных данных, включающих картографическую и всю другую относящуюся к навигации информацию;
- Четкое знание возможностей и ограничений всей системы (аппаратных средств, npoiTiaMMiioro обеспечения, данных, датчиков информации, дисплея);
- Знание, какую информацию и когда необходимо использовать при решении задач.
Улучшение ECDIS. Совершенствование ECDIS представляет собой основное направление развития систем с ЭК. ECDIS появилась как система "отображения картографической и навигационно-гидрографической информации" с элементами подготовки решений по управлению движением судна в процессе перехода. Основной путь развития ECDIS состоит в превращении ее в полноценную систему поддержки принятия решений на мостике. С этой целью проводятся обширные работы по расширению числа отображаемых на экране ECDIS морских информационных объектов (МИО) и функций по подготовке решений.
Термин «морские информационные объекты» означает отображаемые на экране элементы, несущие картографическую и другую, относящуюся к навигации информацию. Это различные картографические и навигационно-гидрографические объекты, характеризующие движение собственного судна элементы (позиция, прошлый путь, планируемый маршрут и др.), данные САРП о целях и т.д.
В разработку стандартов отображения МИО для ECDIS были привлечены многие международные организации.
Автоматически управляющая проводкой судна по маршруту система в документах ИМО называется Track control system. Эта система в соединении с датчиками курса, скорости и положения судна должна удерживать судно на линии предварительно заданного маршрута при движении на полном морском ходу и на маневренных скоростях переднего хода. В качестве такой управляющей системы могут выступать:
• реализующий функции управления автоматизированный приемоиндикатор позиционной системы (Глонасс, GPS, DGPS и др)
• навигационная или навигационно-информационная система (ECDIS, ECS), имеющая режим управления,
• дополнительный модуль авторулевого в соединении с датчиками положения судна и устройством планирования его пути.
Ниже при характеристике маршрута используются понятия:
- отрезок маршрута - часть пути между двумя соседними точками поворота,
-участок маршрута - часть маршрута между двумя его любыми точками.
-маршрутный путевой угол отрезка пути (CUR - course under route) - угол между направлением на север и направлением от начальной к конечной точке отрезка,
- активный отрезок пути - отрезок маршрута, по которому в данный момент движется судно.
Параметры, определяющие маршрут судна, обычно хранятся в памяти электронного устройства, предназначенного для планирования пути. Этим устройством может быть ECDIS, ECS, автоматизированный приемоиндика-тор позиционной системы, специальная станция планирования и оптимиза-ции пути судна.
Маршрут, по которому должно пройти судно, задается в памяти системы координатами путевых точек (точек поворота). Путевым точкам (WP - way points) система обычно присваивает порядковые номера, начальная точка маршрута считается нулевой или первой.
Согласно требованиям ИМО при составлении маршрута определяются его прямолинейные и криволинейные участки. Криволинейные участки траекторий поворотов судна с одного прямолинейного отрезка пути на другой приближенно считаются дугами окружности и задаются своим радиусом. Устанавливается также интервал времени (либо дистанция), за который перед началом поворота система должна предупреждать судоводителя о подходе к точке поворота.
Назначается источник информации (SN - sensors), по которому будет определяться место судна и рассчитываться его маршрутные координаты (DR, Глонасс, GPS, DGPS, Loran, Decca, Radar, ARPA).
Устанавливаются величины Yдоп допускаемых отклонений от маршрута на его отрезках (CW - course width). Значения этого параметра при установке могут изменяться плавно либо задаваться дискретно названием требуемой точности судовождения на отрезке маршрута, например: очень высокая
(VH - very high), высокая (Н -high), средняя (М - middle), удовлетворительная (S - satisfactory). Каждому названию точности в этом случае соответствует определенное цифровое значение Yдоп.
Критерий оптимальности проводки судна но маршруту. Задача плавания по маршруту разделяется на две в определенной мере самостоятельные задачи:
• компенсацию отклонений от постоянного или изменяющегося назначаемого курса следования (стабилизация на курсе в широком смысле слова),
• определение курса следования, который должен стабилизироваться.
Первую задачу выполняет традиционная схема авторулевого. В этом случае АР совместно с судном образует объект управления движением на траектории - стабилизированное на курсе судно.
Задачей системы управления движением по траектории является расчет и назначение курса следования, стабилизация которого обеспечивает точное движение судна по линии пути. Так как приближенно курсы следования на отрезках маршрута определены соответствующими значениями маршрутных путевых углов ПУМ (CUR), то задача плавания по маршруту формулируется как задача коррекции курса следования.
При выполнении поворотов основным требованием к системе проводки судна по маршруту является точное определение времени (точки) начала поворота. Это требование может быть выполнено при использовании современных методов прогноза маневров судов.
Ряд навигационных средств позволяют с большой частотой определять отклонение судна от линии пути при плавании по маршруту. Это создает возможность практически непрерывного поправления задаваемого для стабилизации курса следования. Такую корректировку иногда считают наиболее эффективной. Но это не совсем верно по следующим причинам:
■ в районах, в которых допустимо автоматическое управление боковым смещением, для достижения требуемой точности судовождения не обязательны непрерывные корректировки курса;
■ учитывая инерционность стабилизированного по курсу судна и ограниченную точность измерения бокового отклонения, легко доказать, что дискретные корректировки по обеспечиваемой точности проводки не уступят непрерывным, если правильно выбран их интервал;
■ дискретные корректировки лучше непрерывных меньшим влиянием на качество стабилизации курса,
■ не все средства обсерваций позволяют непрерывно определять место судна.
Минимальный перечень функций ECDIS определен стандартом «Perfonnance Standards for ECDIS».
Каталог карт
Система обеспечивает возможность пополнения, проверки и просмотра каталога судовой коллекции электронных карт. Возможен просмотр, регистрация, корректура и удаление любой карты из каталога. Каталог содержит: имя электронной карты, источник карты, тип проекции оригинальный масштаб, дату последней корректуры, название географического района.
Подбор электронной карты
Работая с электронным кат&тогом, судоводитель может подобрать электронные карты всех необходимых масштабов на предстоящий переход, проверить полноту подбора карт с точки зрения, как удобства электронной прокладки, так и достаточной детальное™ изображения. На один и тот же участок маршрута можно подобрать карты разных масштабов (генеральные, путевые, крупномасштабные). Список подобранных карт хранится в памяти системы и может быть воспроизведен на экране по запросу судоводителя.
Корректура электронных карт
Система обеспечивает возможность корректуры электронных карт на с\дне:
-автоматически с использованием систем спутниковой связи:
-полуавтоматически, путем перезаписи информации с физического носителя (дискеты или компакт-диска) в картографическую базу данных системы:
-вручную, путем нанесения судоводителем на электронную карту с помощью клавиатуры дополнительной информации в виде текста и специальных символов, имеющихся в библиотеке базы данных.
Внесенная корректура отображается на экране, не затеняя картографической информации, и четко отличается на се фоне.
Сведения о внесенной корректуре сохраняются в памяти ECDIS и отображаются по запросу судоводителя.
Картографический редактор
Картографический редактор предназначен для внесения судоводителем вручную электронной корректуры на основе использования Извещений мореплавателям.
Картографический редактор это специальный объектно-ориентированный графический редактор, который решает задачи управления, позиционирования и графического представления объектов на карте.
При ручной корректуре ввод данных производится также в формате S-57/DX90.
Судоводитель должен помнить, что любые некорректные операции с оригиналом электронной карты могут повредить его. Желательно сделать копию электронной карты перед её редактированием.
Для работы с картографическим редактором судоводитель должен быть знаком с терминами и структурами S-57/DX90 и Руководством пользователя конкретной системы.
При работе с картографическим редактором нужно иметь ввиду, что КБД содержит два типа объектов: физически существующие объекты S-57/DX90 и картографические объекты (символы, точки, линии, области, тексты и т. д.) существующие только на карте. Несмотря на то, что редактирование этих типов объектов различно, все они имеют пространственную модель на поверхности Земли, которая определяет положение объекта. Это означает, что каждый объект состоит из двух частей: пространственная модель (положение на Земле) и описание (набор атрибутов).
Предварительная прокладка
В задаче производится формирование маршрута. Каждый маршрут имеет имя, номер, генеральную карту, координаты путевых точек, границы допустимых отклонений от линии маршрута, перечень путевых карт и другую информацию. Все маршруты сохраняются в базе данных маршрутов. Судоводитель может добавлять, редактировать и удалять маршруты из базы данных.
На подобранных картах выполняется предварительная злей тронная прокладка выбранного маршрута предстоящего перехода. При этом предусмотрена возможность отображения на генеральной карте рамок подобранных путевых карт. Маршрутные точки могут наноситься либо по географическим координатам (широта, долгота), либо с помощью маркера, по пеленгу и дистанции относительно выбранного ориентира. Заданные таким образом маршрутные точки соединяются линиями предварительной прокладки - локсодромиями или ортодромиями, по выбору судоводителя. В результате программа определяет протяженность маршрута перехода и его участков, продолжительность переходов и скорость на участках перехода. С целью "подъема" электронной карты в любой точке экрана судоводитель может нанести точки, линии, условные знаки, цифры, буквы.
В процессе выполнения предварительной прокладки можно при необходимости корректировать выбранный маршрут, например, добавляя и убирая маршрутные точки либо изменяя их положение. Уже на стадии планирования перехода система способна выдавать предупредительный сигнал, если электронная линия предварительной прокладки проходит по опасным глубинам либо в недопустимой близости от навигационных опасностей.
При выполнении предварительной прокладки на картах могут выполняться измерения координат, пеленгов и дистанций на выбранные с помощью маркера объекты. Выполненная предварительная прокладка заносится в память ECDIS.
Судоводитель имеет возможность выбирать маршрут из хранящихся в базе данных маршрутов. При этом имеется возможность редактирования выбранного маршрута: добавление, удаление, перенос маршрутных точек или реверсирование маршрут
При выполнении предварительной прокладки на картах может отображаться линия большого круга между маршрутными точками,
При планировании маршрута судоводитель может ввести пределы отклонения от заданного маршрута. В этом случае система выдаст предупредительный сигнал во время плавания в случае превышения фактического отклонения судна заданных пределов.
Выбор карты производится автоматически по месту судна или вручную судоводителем. Судоводитель выбирает из списка стандартных масштабов и устанавливает масштаб карты. В процессе плавания система отображает электронную карту и меркаторской проекции с ориентацией "север" в масштабе адекватном стандартным масштабам морских навигационных карт. При этом судоводитель имеет возможность изменять масштаб карты, как в сторону увеличения, так и в сторону уменьшения. При таких изменениях масштаба размеры отображаемых символов, цифр и букв не изменяются, а увеличение изображения не обеспечивает улучшения детальности отображаемого участка. Для более детального отображения данного участка необходимо подобрать по электронному каталогу другую электронную карту с нужным масштабом. Смена отображаемого участка электронной карты на соседний участок производится автоматически (а при необходимости - и вручную) при приближении символа судна на установленное судоводителем предельное расстояние к краю экрана. Смена электронной карты также производиться автоматически в соответствии со списком подобранных на переход карт или по указанию судоводителя.
Иногда полное отображение всех объектов на экране затрудняет чтение карты. Поэтому в ECDIS предусмотрены три уровня информационной плотности электронной карты:
-базовый уровень отображения, который отображает объекты базового уровня, а также все навигационные объекты и некоторую дополнительную информацию;
-стандартный уровень отображения, который отображает объекты базового уровня, а также вес навигационные объекты и некоторую дополнительную информацию;
-полный уровень представления является полной копией бумажной карты.
В зависимости от решаемых задач судоводитель выбирает один из трех возможных уровней отображения электронной карты - базовый, стандартный или полный.
Расчет текущих координат и отображение символа судна на карте
На экране отображается отметка собственного судна, перемещающаяся в реальном масштабе времени в соответствии с данными, полученными от выбранных судоводителем источников информации (автономных: гироскопического курсоуказателя и лага или введенных вручную или же от ПИ КНС (ПИ РНС) в режиме непрерывной обсервации). При этом функция привязки электронной карты к месту судна находится в положении <включено> (ship on (position on)). Для просмотра любого другого района карты или другой карты судоводитель устанавливает переключатель функции привязки электронной карты к месту судна в положение <выключсно> (ship off (position off)).
Таким образом, обеспечивается режим истинного движения символа собственного судна на неподвижной электронной карте. Размер символа судна можно изменять.
На экране отображаются:
-отметка собственного судна;
-планируемый и запасной маршруты;
-пройденный путь с отметками времени;
-дистанцию и пеленг на очередную маршрутную точку (DIST TO WR, BRG TO WR) и время плавания до нее (TIME TO WR);
-боковое уклонение судна от линии заданного пути (cross track error-CTE) с указанием стороны (знака) уклонения;
-географические координаты любого объекта на экране, на который судоводитель установил маркер;
или
-текущая дистанция и пеленг на любой объект на экране, на который судоводитель установил маркер (CURSOR RNG, CURSOR BRG);
-оригинальный масштаб карты;
-установленный масштаб карты;
-признак режима отображения ("привязан/отвязан");
-предупредительные сигналы и информация;
-положение маркера (координаты или пеленг и дистанция). При выполнении исполнительной прокладки судоводитель
может вызывать на экран дополнительную информацию, имеющуюся в картографической базе данных.
Навигационные расчеты и измерения Система по указанию судоводителя выполняют расчет времени прибытия или скорости в любую маршрутную точку. Система позволяет измерять текущий пеленг, дистанцию, траверзное расстояние на любой объект или место на карте, на которые судоводитель установил маркер; координаты любого объекта, на который установлен маркер; пеленг и расстояние между любыми точками на карте. Система выполняет и отображает прогноз возможной траектории маневра, прогноз положения судна при заданных условиях плавания. Система выполняет расчеты для плавания по ортодромии. В зависимости от освещения рабочего места судоводитель может выбрать палитру цветов отображаемой карты: день (daylight), сумерки (twilight), лунная ночь (dusk), безлунная ночь (night).
Литература
1. А.И. Родионов, А.Е. Сазонов «Автоматизация судовождения», М., 1983
2. Л.Л. Вагущенко, Н.Н. Цымбал «Системы автоматического управления движением судна», Одесса, 2002
3. Л.Л. Вагущенко «Интегрированные системы ходового мостика», Одесса, 2003.
4. Н.И. Буров «Электронные навигационные карты», Одесса, ОГМА, 2000
Похожие работы

... информации. Набираемая информация отображается на дисплее, что позволяет контролировать ее правильность. Клавиатура и дисплей АИС должны быть независимыми от других навигационных устройств. Судовыми системами отображения АИС могут быть система отображения электронных карт (ECDIS, ECS, RCDS), РЛС, САРП или дисплей персонального компьютера. АИС и связанные с ней датчики информации питаются от ...
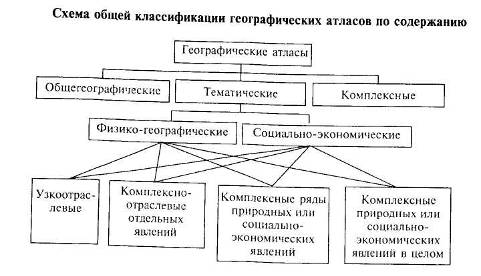
... данных, созданы группы поиска, добавлена информация о проекте и его технической составляющей. 2.2 Перспективы атласного картографирования административных районов Калужской области Будущее атласного картирования в создании районных географических атласов как краеведческо-справочных так и научно-справочных имеет хорошие перспективы. Интересно направление в создании серии туристских карт по ...
... . Для одного пользователя, используется для ведения настольной БД или как клиент для подключения к серверу БД. Оценка современных СУБД на соответствие требованиям, предъявляемым к автоматизированным информационным системам кадастра. Рассмотрим стандартные современные реляционные СУБД по каждому классу продуктов, основные возможности, которые они предоставляют. Произведем оценку их, в соответствии ...
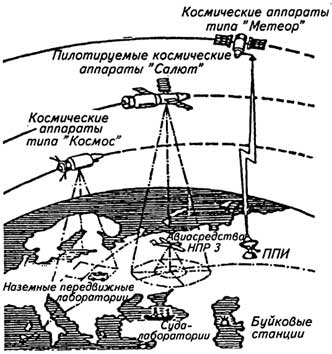
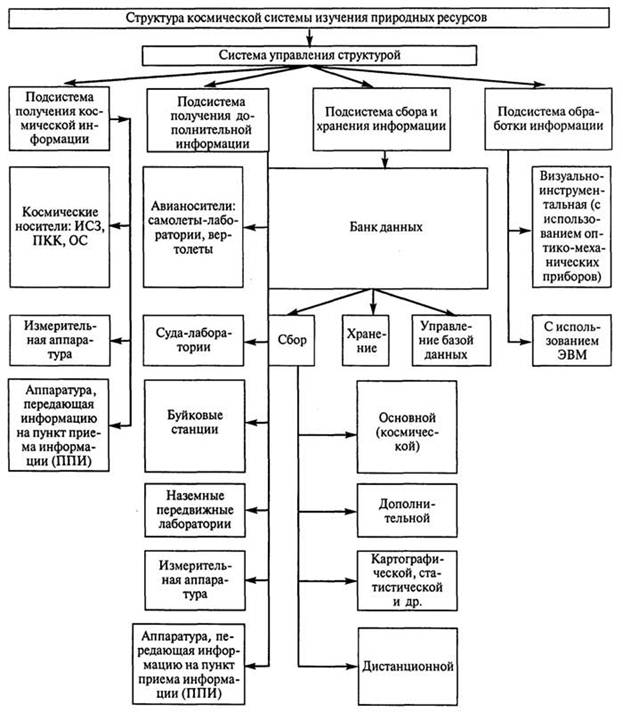
... и другими элементами ландшафта, для разработки и совершенствования методов региональных комплексных исследований, оценки природно-экологических и антропогенных условий территории при проектировании и проведении землеустроительных мероприятий с целью сохранения экологического равновесия. Аэрокосмический мониторинг позволяет одновременно получать объективную информацию и оперативно выполнять ...
0 комментариев