Навигация
3.3 Выбор датчика скорости
Для измерения частоты вращения двигателя используем тахогенератор ТМГ-30П («Микротех») с номинальной частотой вращения 4000 об/мин. Выбор данного устройства обусловлен его высокой надежностью, работоспособностью в жестких условиях эксплуатации. Схема устройства приведена на рис. 11.
3.4 Выбор датчика температуры
В процессе эксплуатации двигателя необходимо контролировать температуру корпуса, чтобы фиксировать перегревание корпуса.
Для контроля температуры выберем датчик ТСМ МЕТРАН-243 фирмы «Метран», работающий в диапазоне -50…+120оС, содержащий один чувствительный элемент и предназначенный для измерения температуры поверхности твердых тел. Схема датчика ТСМ МЕТРАН-243 с удлинительными проводами приведена на рис. 12.
3.5Выбор АЦП
В качестве аналого-цифрового преобразователя будем использовать 8-разрядный АЦП типа К1107ПВ4 («Симметрон»). Микросхема данного типа предназначена для преобразования входного сигнала в параллельный двоичный прямой код. Содержит 6000 интегральных элементов. Масса не более 22 г. Структурная схема АЦП и описание выводов приведены, соответственно, на рис. 13 и в табл. 1.
Предельно допустимые режимы эксплуатации микросхемы допускают: UП1=4.75…5.25 В; UП2= –5.46…–4.94 В; Uвх= –2. 6…2.6 В.
3.6Выбор ЦАП
Выберем в качестве ЦАП микросхему К572ПА1, которая находит широкое применение в различной аппаратуре благодаря малой потребляемой мощности, высокому быстродействию и небольшим габаритам. Микросхема используется для преобразования прямого параллельного двоичного кода на цифровых входах в ток на аналоговом выходе, который пропорционален значениям кода и опорного напряжения. На рис. 14 числами обозначены: 1 – аналоговый вход 1; 2 – аналоговый вход 2; 5-12 – цифровые входы 2-9; 13, 14 – напряжение источника питания; 15 – опорное напряжение; 16 – вывод резистора обратной связи. Число разрядов К572ПА1 – 8.
3.7Выбор остальных элементов системы
Будем также использовать операционные усилители типа 553УД2, тиристоры КУ101А отечественного производства, руководствуясь невысокой стоимостью указанных элементов и возможностью применения в условиях поставленной в курсовом проекте задачи. Выбранные составные части элементной базы обладают достаточной производительностью для выполнения требуемых функций.
4 Разработка функциональной схемы
Система управления скоростью вращения асинхронного двигателя построена на базе микроконтроллера КР1816ВЕ51. Функциональная схема системы приведена на рис. 15.
5 Разработка алгоритма работы и программы
Реализация алгоритма работы (рис. 16) предполагает уменьшение скорости вращения двигателя до заданного значения в случае его перегрева и отклонения от заданного значения скорости. Параметры, снимаемые с датчиков, поступают в АЦП, преобразуются в двоичный код и сравниваются с заданными значениями. Если значения не попадают в заданный интервал, выполняется подпрограмма корректировки скорости вращения с целью перехода в нормальный режим работы.
Для реализации выбранного алгоритма регулирования с помощью микроконтроллера была составлена программа на языке Ассемблер. Подобная программа может быть написана в среде ProView фирмы Franklin Software Inc, предназначенной для разработки программного обеспечения для однокристальных микроконтроллеров семейства Intel 8051. Текст программы приведен в Приложении.
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте была разработана система регулирования скорости вращения асинхронного двигателя на основе однокристального микроконтроллера 51-го семейства. Была разработана структурная схема, где в качестве отдельных блоков были выделены блок управления, асинхронный двигатель, датчик температуры, датчик скорости, а также регулятор скорости. В качестве объекта управления был выбран трехфазный асинхронный двигатель общепромышленного назначения. В качестве метода управления был выбран способ тиристорного регулирования скорости вращения двигателя (управления с помощью тиристорной пары) как наиболее простой и наименее дорогостоящий из применяющихся в подобных системах способов регулирования. В ходе выбора датчиков, АЦП, ЦАП, в основном, ставка делалась на недорогую отечественную продукцию, поскольку реализация любого проекта всегда требует серьезных материальных затрат. При этом выбранная элементная база удовлетворяет техническим концепциям построения системы. Была построена функциональная схема и блок-схема алгоритма функционирования, отображающие принцип работы всей системы в целом. Была написана программа реализации алгоритма на языке Ассемблер.
В настоящее время существуют множество разработок, посвященных решению поставленной в данном проекте задачи. Однако существующие жесткие стандарты требуют следования современным тенденциям, поэтому необходимы наиболее простые и эффективные пути решения при небольших материальных затратах. Спроектированная система представляет одно из многих конструктивных решений, выбранное в силу причин, описанных выше.
Похожие работы
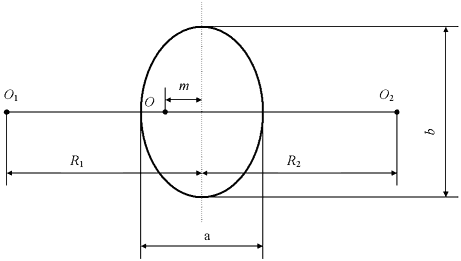
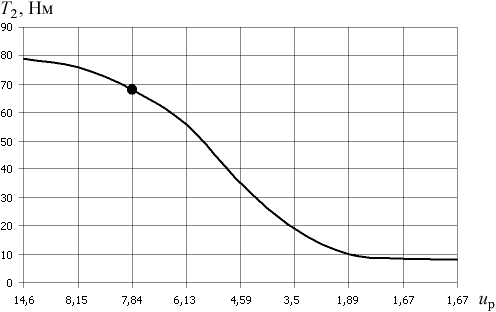
... [1], при фиксированных Fn (нажим в контакте) и f, именно значение β определяет величину Ft, а, следовательно, и момент на выходном валу. Влияние пассивной адаптивности можно определить из рассмотрения зоны фрикционного контакта ведущего и ведомого тел качения вариатора (рис.1). Рис. 1. Зона фрикционного контакта ведущего и ведомого тел качения вариатора Центры О1 и О2 а также, радиусы ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
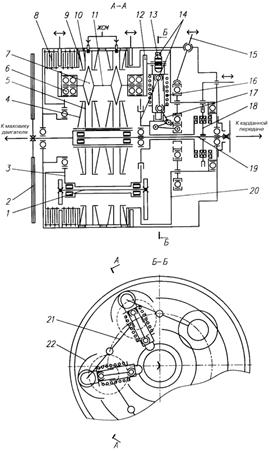
... передача» и заявке на международный патент РСТ/RU99/00162 (автор – Н.В. Гулиа). Принципиальная схема автоматической бесступенчатой коробки передач автомобиля на основе нового адаптивного вариатора представлена на рис. 1. На этой схеме вариатор включает всего два ряда центральных фрикционных дисков – внешних 10 и внутренних 5 с зажатыми между ними сателлитами 7 при помощи тарельчатых (или просто ...
... и с помощью усилителей, имеющих упругую характеристику (например, пневмокамер, управляемых от пневмосистемы). Следует отметить, что вариатор является прогрессивным и без механизма изменения усилия пружин. Но тогда он будет иметь всего одну «мягкую» рабочую характеристику, например, как у гидротрансформатора или электродвигателя постоянного тока с последовательным возбуждением. Описанный механизм ...
0 комментариев