Навигация
РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ
14720
знаков
2
таблицы
24
изображения
4 РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ
ПОДСИСТЕМЫ ИДЕНТИФИКАЦИИ
Изменение момента инерции нагрузки влияет на динамическую ошибку системы. Сымитировать скачкообразное изменение момента инерции нагрузки можно с помощью модели в MatLABe (см. рис 4.1):
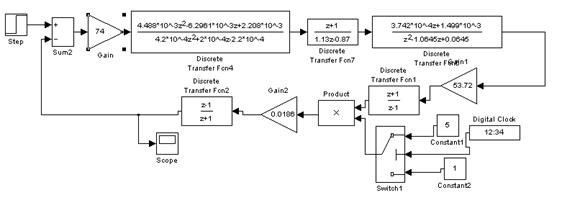
Рисунок 4.1 – Имитация изменения момента инерции нагрузки.
Подсистема идентификации момента инерции приведена на рис.4.2.
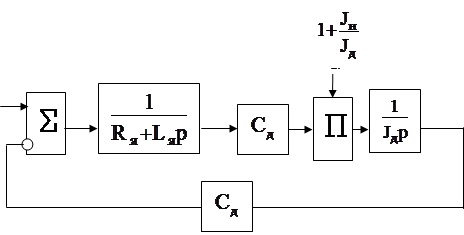
Рисунок 4.2 – подсистема идентификации.
Выведем зависимость i=f(W,Jн):
1. Найдём Jн:
![]() ;
;
![]() ;
;
![]() . (4.1)
. (4.1)
2. Но ![]() , отсюда
, отсюда ![]() . (4.2)
. (4.2)
2. Подставим значение Jн в формулу (4.1):
3.
 (4.3)
(4.3)
![]() (4.4)
(4.4)
В формулу (4.4) подставим численные значения:
![]() ,
, ![]() ,
, ![]() .
.
![]() ; (4.5)
; (4.5)
Реализуем данную функцию в MatLABe (см. рис. 4.3):
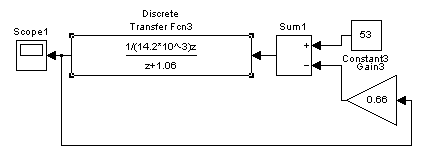
Рисунок 4.3 – Реализация подсистемы идентификации в MatLABe
Подсистема идентификации (ПИ) включается в систему управления следующим образом (см. рис. 4.4):
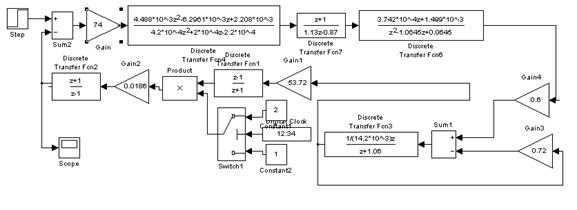
Рисунок 4.4 – Подключение ПИ в систему управления.
Исследуем переходные процессы в системах с ПИ и без нее при параметре момента инерции Jн =10Jд (см. рис. 4.5 и 4.6):
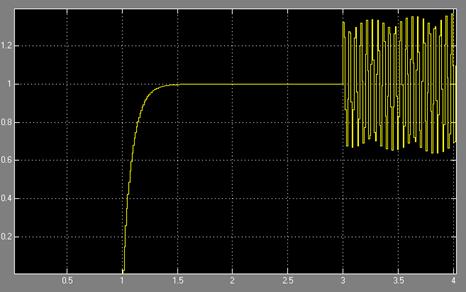
Рисунок 4.5 Переходные процессы без ПИ
|
|
|
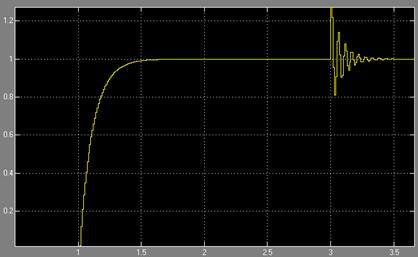
Рисунок 4.6 – Переходные процессы в системах с ПИ
Как видно из рисунка, уменьшилась колебательность системы, а также уменьшилась просадка скорости при изменении момента инерции нагрузки.
Действия ПИ аналогичны при моменте инерции нагрузки, равному 5Jд и Jд (см. рис. 4.7, 4.8):
|
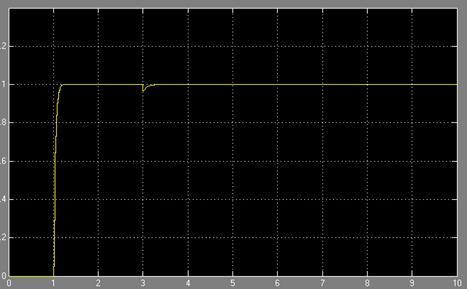
Рисунок 4.7 Переходные процессы при Jн =Jд без ПИ
|
|
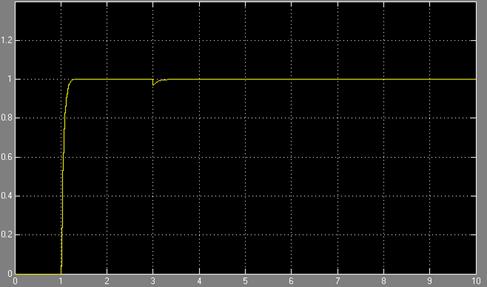
Рисунок 4.8 – переходные процессы при и Jн=Jд с ПИ
Предпримем попытку идентифицировать полученную систему, как апериодическое звено II порядка ![]() . При идентификации целесообразно использовать обратную частотную характеристику
. При идентификации целесообразно использовать обратную частотную характеристику ![]() , точнее квадрат её модуля
, точнее квадрат её модуля ![]() . Произведём замену
. Произведём замену ![]() ,
, ![]() , а коэффициенты
, а коэффициенты ![]() ,
, ![]() ,
, ![]() . В результате получим уравнение параболы
. В результате получим уравнение параболы ![]() .
.
Произведём ряд опытов с подачей в систему синусоидального воздействия единичной амплитуды и различной частоты.
![]()
|
|
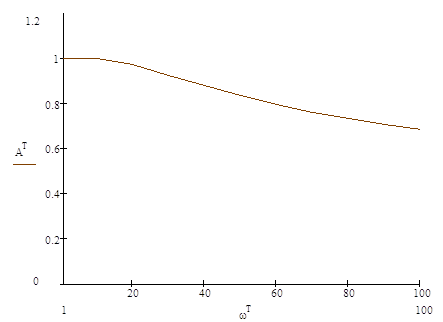
Рисунок 4.9 – Апмлитудно-частотная характеристика.
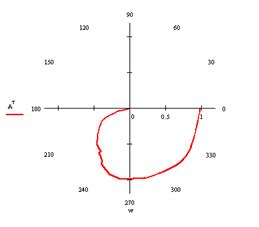
Рисунок 4.10 – Апмлитудно-фазовая характеристика.
В результате аппроксимации в параболу получили следующее уравнение:![]() .
.
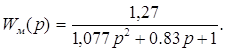
Отсюда 
Тогда передаточная функция модели будет иметь вид:
Преобразуем его в MathCADe в Z-форму
![]()
Реализуем полученную передаточную функцию в MATLAB 6
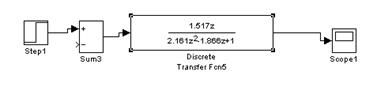
Рисунок 4.11 модель полученной передаточной функции в MATLAB
Результаты реализации представлены на рисунке 4.12:
|
|
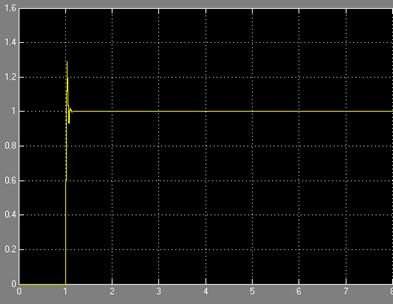
Рисунок 4.12 – Переходной процесс в объекте
Анализ графиков переходных процессов, представленных на рисунках 4.11 и 3.2 позволяет сделать вывод об их качественном сходстве, а следовательно и верности идентификации системы.
Выводы
В процессе курсовой работы были получены передаточные функции неизменяемой части, регулятора, была построена желаемая ЛАЧХ. Оценка качества регулирования была проведена на ЭВМ при помощи пакетов MatLAB b MathCAD. В результате проверки можно сделать вывод об удовлетворительной работе системы при подаче на неё различных сигналов. В соответствии с заданием была разработана подсистема идентификации изменения момента инерции нагрузки. При её подключении заметно улучшилась реакция системы на нагрузку, уменьшилась динамическая ошибка. Была проведена идентификация системы цифрового электропривода как астатического звена второго порядка. По результатам сравнения модели и объекта можно судить о достаточно высокой точности идентификации.
Перечень ссылок
1. Лебедев А.М. «Следящие электроприводы станков с ЧПУ» - Москва 2000 г.
2. Лебедев А.М. «Моделирование в научно-технических исследованиях» - Москва 1999г.
3. Сердюк А.А. Лекции по курсу «Идентификация и моделирование технологических объектов» - ДГМА 2006 г.
4. Сердюк А.А. Методические указания к курсовому проектированию по дисциплине «Программное управление станков» - ДГМА 2004 г.
Похожие работы

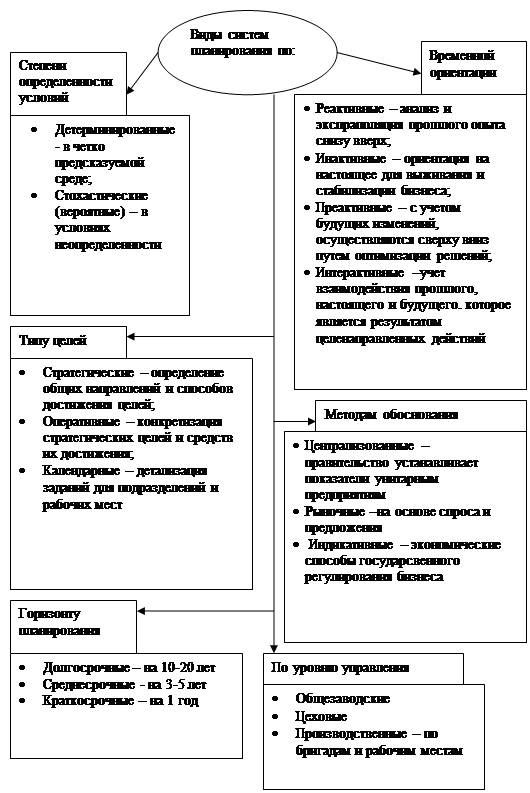


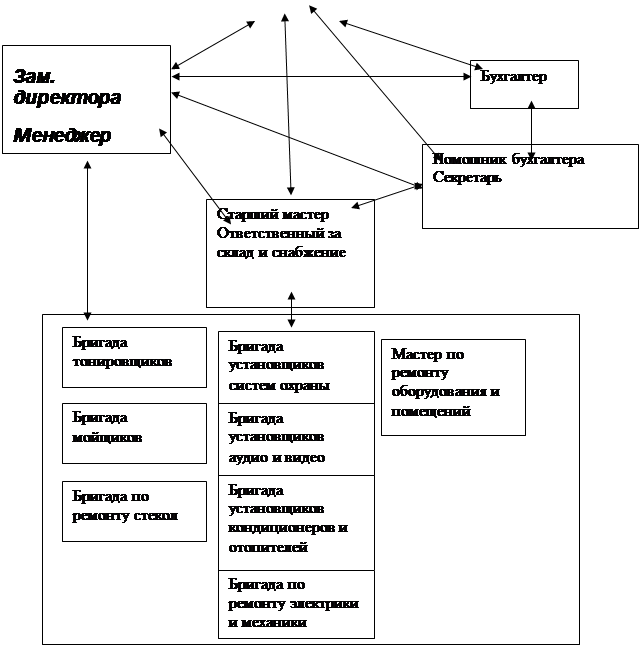
... рынке для выживания в конкурентной среде и успешного развития предприятию необходим четко разработанный план как на длительную перспективу, так и на текущий период. ГЛАВА 2. АНАЛИЗ ПОЛОЖЕНИЯ ПРЕДПРИЯТИЯ ООО «АВТОДОМ-АТЭКС» НА РЫНКЕ УСЛУГ АВТОСЕРВИСА 2.1 Краткая технико-экономическая характеристика предприятия Предприятие «Автодом–Атэкс» учреждено на основании решения участников от 23 ...
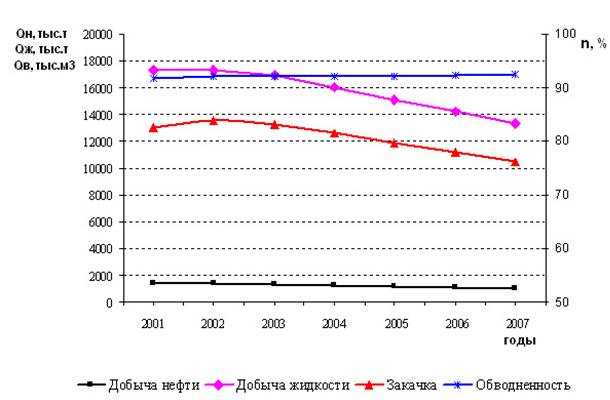
... изоляции. Однако из них широкое применение нашли только методы, в которых закачивание водоизолирующих материалов производится с использованием пакеров. 2.4 Применение новых технологий при проведении ремонтно-изоляционных работ Необходимость проведения мероприятий на нефтяных залежах по ограничению притока попутно добываемой воды не вызывает сомнений. Обычно темп роста обводненности скважин ...
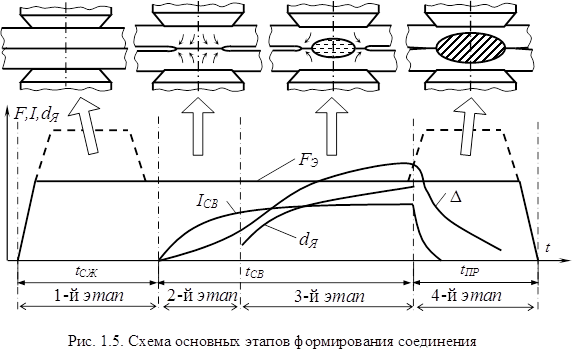
... , при обработке металлов давлением. Экспериментальные исследования процессов пластической деформации металла в зоне формирования соединения при контактной точечной сварке по этой методике проводятся на натурных образцах с предварительно нанесенной координатной сеткой, технология изготовления которых предложена и описана в работе [128]. При исследованиях пластических деформаций в плоскостях ...
... и обеспечение готовности этих объектов к локализации и ликвидации последствий этих аварий. Промышленная безопасность технологических операций на опо обеспечивается следующим комплексом мероприятий: -наличием и функционированием необходимых приборов и систем контроля за производственными процессами, а так же аппаратуры наблюдения, оповещения, связи и поддержки неотложных действий ...
0 комментариев