Навигация
Методы синтеза последовательных корректирующих устройств
10050
знаков
5
таблиц
16
изображений
3. Методы синтеза последовательных корректирующих устройств
При расчете параметров корректирующих устройств можно использовать любой из методов определения качества, но наиболее часто используют частотные методы, в частности, логарифмические частотные характеристики.
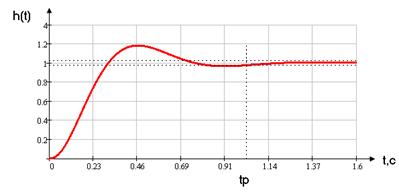
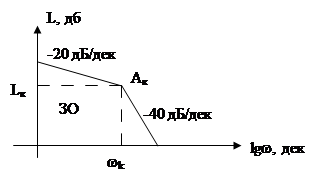
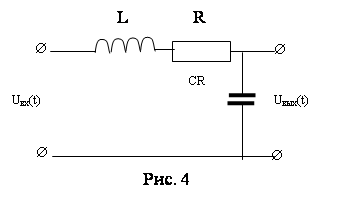
Рассмотрим, как по виду ЛАЧХ можно судить о качестве переходного процесса (рис. 4).
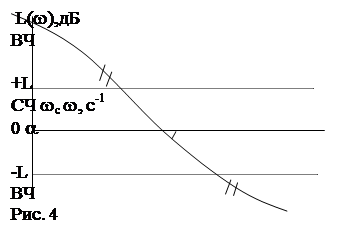
Характеристику разбивают на три части: НЧ - определяет статику; СЧ - определяет динамику; ВЧ – не играет роли.
Точка пересечения ЛАЧХ с осью абсцисс характеризует частоту среза - wс .
1. Время переходного процесса является функцией частоты среза tп = f(wс); tп = c/wс. 2. Число перерегулирований является функцией угла пересечения ЛАЧХ оси абсцисс N = f(a). Обычно N = 2¸3, при этом a »-20 дБ/дек. 3. Величина перерегулирования является функцией запаса устойчивости по амплитуде – L. s% = f(L). Обычно s% = 20¸30, при этом L »20 дБ.4. Порядок синтеза последовательного корректирующего устройства
Порядок синтеза последовательного корректирующего устройства рассмотрим на конкретном примере.
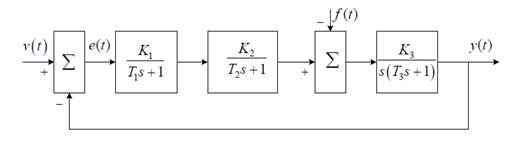
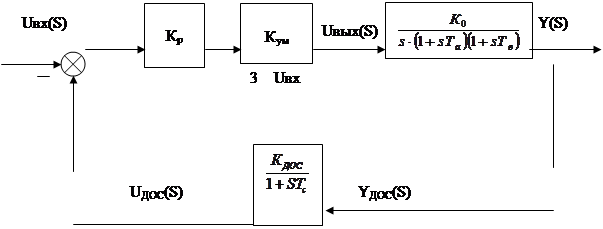
Пример 1. Дана система, схема которой приведена на рис. 5.
Пусть T1 = 1 c, T2 = 0,1 c, kv = 10 c-1. Необходимо синтезировать последовательное корректирующее устройство, обеспечивающее следующие показатели качества:
1. Величина статической ошибки eс = 0.
2. Частота среза желаемой системы wсж = 1 с-1. 3. Величина относительного перерегулирования s% = 20¸30. 4. Число перерегулирований N = 2¸3. 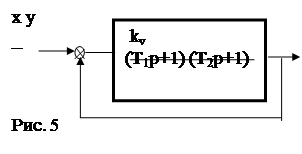
Решение:
1. Строим ЛАЧХ заданной (реальной) системы (рис. 6).
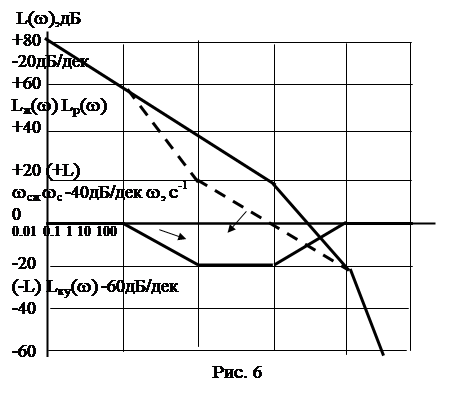
Строим ЛАЧХ желаемой системы исходя из следующего:
- для обеспечения требуемого времени переходного процесса ЛАЧХ желаемой системы должна пересекать ось абсцисс в точке wсж = 1с-1.
-для обеспечения требуемого числа перерегулирований N = 2¸3 угол пересечения ЛАЧХ оси абсцисс должен равняться a »-20 дБ/дек.- для обеспечения требуемой величины перерегулирования s% = 20¸30 запас устойчивости по амплитуде должен равняться L = ±20 дБ.
-для обеспечения требуемой величины статической ошибки eс= 0 логарифмическая характеристика желаемой системы в области низких частот должна иметь наклон –20 дБ/дек.
3. Сочленяем ЛАЧХ исходной Lр (w) и желаемой системы Lж(w) в области низких и высоких частот.
4. Вычитаем из ЛАЧХ исходной Lр (w) ЛАЧХ желаемой системы Lж(w), и получаем ЛАЧХ корректирующего устройства Lку(w).
5. По виду ЛАЧХ корректирующего устройства Lку(w) определяем его структуру и параметры.
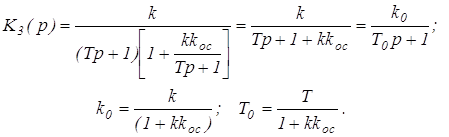
Для рассматриваемого примера, корректирующее устройство представляет собой интегро-дифференцирующее звено, передаточная функция имеет вид:

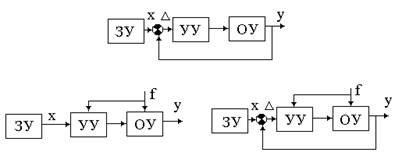
В зависимости от величин постоянных времени схемная реализация корректирующего устройства может быть различной:
- при 0 £ Ti £ 10 c-1 можно использовать пассивный RC –четырех-полюсник (рис. 3б);
- при 10 c-1 £ Ti £ 100 c-1 можно использовать активный фильтр (рис. 7);
- при Ti > 100 c-1 можно использовать цифровой фильтр.

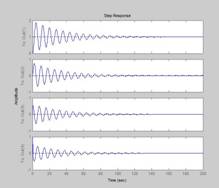
6. Записываем передаточную функцию скорректированной системы, строим переходный процесс и определяем показатели качества, если они удовлетворяют необходимым показателям, то процесс синтеза окончен.
5. Параллельные корректирующие устройства
Параллельные корректирующие устройства используются в виде местных, охватывающих отдельные элементы систем, и главных обратных связей. При этом в основном используются отрицательные обратные связи (ООС), повышающие устойчивость систем. Положительные обратные (ПОС) связи иногда используют как местную обратную связь для повышения коэффициента усиления на каком-либо участке системы.
Корректирующие обратные связи бывают гибкие и жесткие.
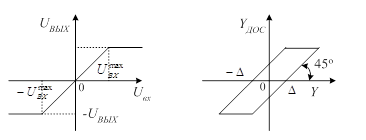
Жесткие ООС (ЖООС) действуют как в переходном, так и установившемся режиме. В качестве ЖООС используются следующие звенья:

Гибкие ООС (ГООС) действуют только в переходном режиме (пропускают высокочастотные составляющие сигнала и не пропускают низкочастотных).
В качестве ГООС используются следующие звенья:

Рассмотрим влияние обратной связи на параметры звеньев (к и Т).
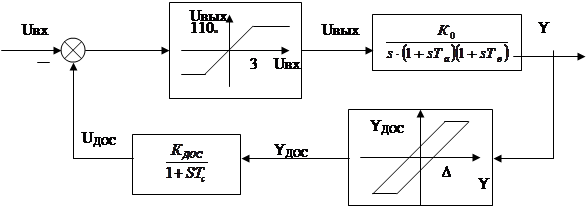
Пример 2. Для заданной системы (рис.8). Определить влияние ЖООС на параметры звеньев.
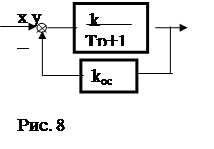
Решение: Передаточная функция замкнутой системы равна:
Охват инерционного звена ЖООС уменьшает постоянную времени звена и его коэффициент усиления.
Литература
1. Бронштейн И.Н., Семендяев К.Н. Справочник по математике для инженеров и учащихся вузов. — М.: Наука,1986.
2. Егоров А.И., Ким Дмитрий Теория автоматического управления. Том 1. Линейные системы. ФИЗМАТЛИТ®, 2007. – 312с.
3. Ким Д.П. Теория автоматического управления. Том 2. Многомерные, нелинейные, оптимальные и адаптивные системы. ФИЗМАТЛИТ®, 2004.
4. Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза систем. БХВ-Петербург, 2004. – 640с.
Похожие работы
... записи в Zam_ck=inv(l+sysl)*sysl можно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck. 2.Исследование линейной импульсной системы автоматического управления Задание: 1) Найти передаточные функции импульсной САУ: W*(z) разомкнутой системы, Ф*(z) – замкнутой системы, Фе*(z) – системы по ошибке. Параметры Т, Т1, τ1, К0, ...
... устройства, которое нужно добавить к некоторой неизменяемой части системы, чтобы обеспечит требуемое качество системы в установившемся и переходном режимах. Наиболее приемлемым для решения задачи динамического синтеза является метод логарифмических амплитудных характеристик (метод ЛАХ). [1, § 12.5] Стадии синтеза по методу ЛАХ включают: 1. построение располагаемой ЛАХ, т.е. ЛАХ исходной ...
... значениях функции. Начальное значение функции:. (2.10) Конечное значение функции: . (2.11) 7. Теорема запаздывания . (2.12) 4. Дифференциальные уравнения САУ При математическом описании систем автоматического управления составляют уравнения статики и динамики. Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими. Уравнения динамики ...



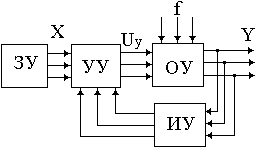
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
0 комментариев