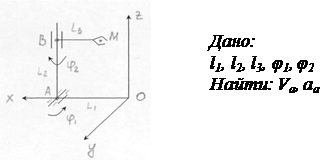
I Определить скорость и ускорение точки М методом простого движения точки
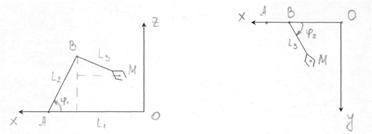
Составим уравнения точки М
![]()
![]()
![]()
Определим проекции скорости точки М на оси координат
![]()
![]()
![]()
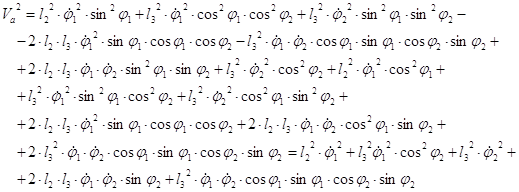
Квадрат модуля скорости точки М вычислим по формуле:
![]()
Определим проекции ускорения точки М на оси координат

![]()
![]()
Модуль ускорения точки М
![]()
II Определить скорость и ускорение точки М методом сложного движения точки
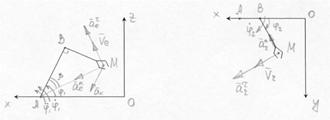
По теореме о сложении скоростей имеем:
![]()
![]()
![]()
![]() ;
; ![]() ;
; ![]()
По методу проекции имеем:
![]()
![]()
![]()
По теореме о сложении ускорений имеем:
![]()
![]()
![]()
![]()
![]()
![]()
По методу проекции имеем:

![]()

Модуль ускорения точки М
![]()
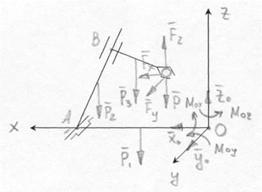
СТАТИКА
Дано:
| φ1=-30 | Fx=4 H | l1=0,6 м | S0=1 см2 |
| φ2=-75 | Fy=6 H | l2=0,6 м | ρ(стали)=7,8 г/см3 |
| Fz=2 H | l3=0,4 м | g=10 м/с2 |
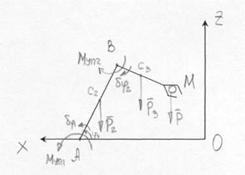
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
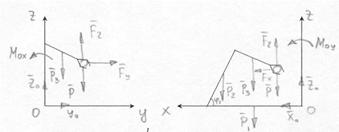
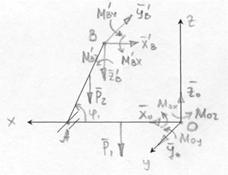
Рассмотрим равновесие всего манипулятора
![]()
![]()
![]()
![]()
![]()
![]()





![]()
![]()
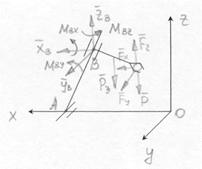
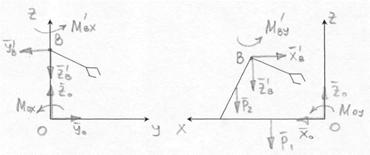
Рассмотрим равновесие руки манипулятора
![]()
![]()
![]()
![]()
![]()
![]()




![]()
![]()
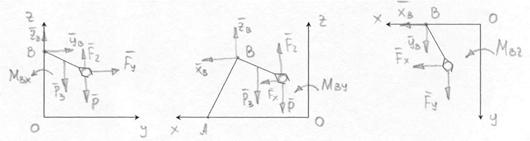
Рассмотрим равновесие без руки манипулятора
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()

![]()
![]()
ДИНАМИКА
Дано:
| l1=0,6 м | m1=0,468 кг | t=2c |
| l2=0,6 м | m2=0,468 кг |
|
| l3=0,4 м | m3=0,312 кг |
|
| g=10 м/с2 | m=0,5 кг |
![]()
![]()
![]()
![]()
n=2 – число степеней свободы
![]()
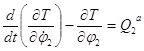
![]()
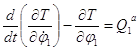 - Уравнения Лагранжа 2 рода
- Уравнения Лагранжа 2 рода
Определим кинетическую энергию манипулятора
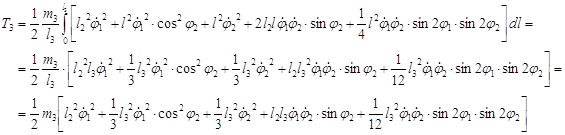
![]()
![]() , т.к. первая деталь манипулятора неподвижна
, т.к. первая деталь манипулятора неподвижна
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()

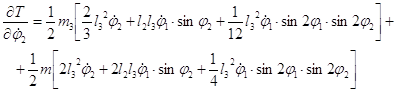
Вычисляем частные производные



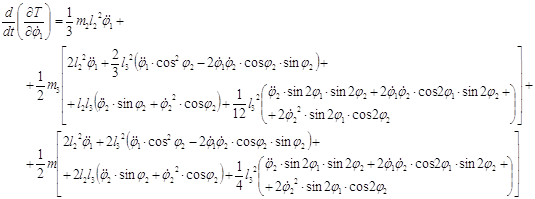
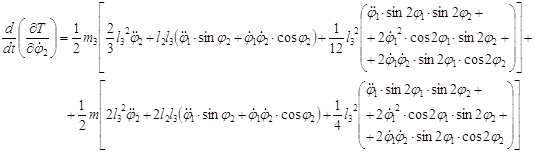
Вычисляем обыкновенные производные по времени
Для определения обобщенных сил сообщаем системе возможные перемещения
Активные силы: МУП1, МУП2, Р1, Р2, Р3, РМ.
![]()
![]()
1) ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
2) ![]()
![]()
![]()
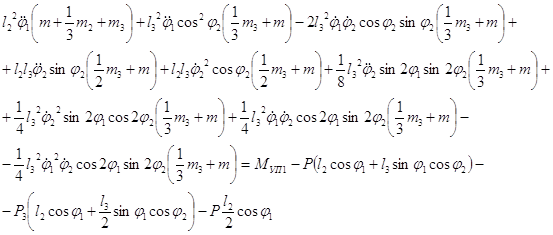
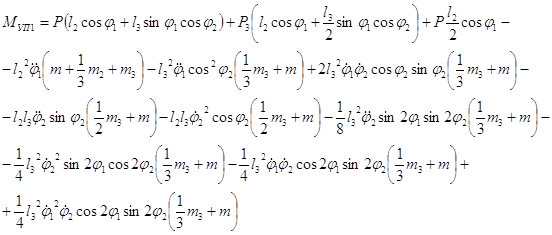
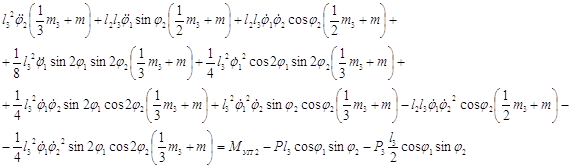
Подставляем преобразованные выражения в уравнения Лагранжа 2 рода
Похожие работы
... к точности, хотя это уменьшение весьма не значительное. 4.Программные средства для исследования динамической модели портального манипулятора 4.1 Программа для вычисления параметров переходного процесса портального манипулятора Для исследования полученной динамической модели, построения графиков приведенных в работе, использовалась программа “Модель портального манипулятора МРЛ-901П в момент ...
... уменьшение времени перемещения, что можно использовать на операциях с низким требованием к точности, хотя это уменьшение весьма не значительное. 4. Программные средства для исследования динамической модели портального манипулятора 4.1 Программа для вычисления параметров переходного процесса портального манипулятора Для исследования полученной динамической модели, построения графиков приведенных в ...
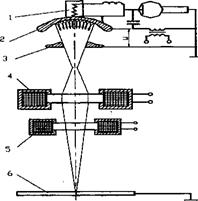
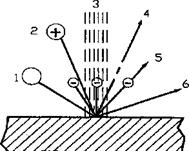
... -лучевое оборудование и разрабатывается аппаратура для наблюдения, контроля и регулирования процесса электронно-лучевого воздействия. Интенсивный обмен информацией в области достижений электронно-лучевой технологии привел к тому, что электронный луч стал заурядным технологическим инструментом для нагрева, плавки, зонной очистки, сварки металлов больших толщин, микросварки, макро- ...

... всех колёс : d1 = m·Z1 = 6·32 = 192 мм ; d2 = m·Z2 = 6·16 = 96 мм ; d3 = m·Z3 = 6·18 = 108 мм d4 = m·Z4 = 6·30 = 180 мм d5 = m·Z5 = 6·12 = 72 мм d6 = m·Z6 = 6·30 = 180 мм Принимаем масштабный коэффициент построения схемы механизма : КL = 0,001 м/мм ; Определяем скорость точки, принадлежащей ведущему звену (точка А): Va = ω1 · d = 24 м/с ; Принимаем масштабный ...
0 комментариев