Навигация
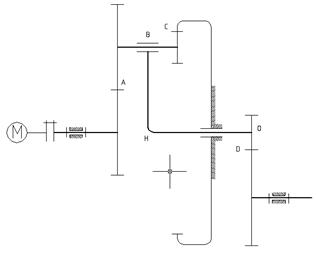
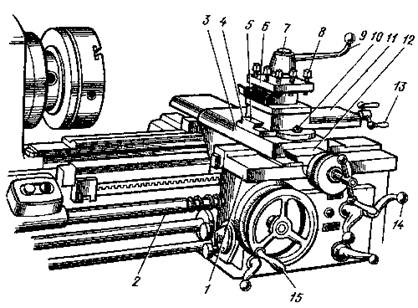
Механизм поперечно-строгального станка
25719
знаков
5
таблиц
3
изображения
Кафедра «Основы проектирования машин»
Курсовая работа
Поперечно-строгальный станок
Содержание
1. Кинематический анализ рычажного механизма
1.1 Структурный анализ механизма
1.2 Определение недостающих размеров
1.3 Определение скоростей точек механизма
1.4 Определение ускорений точек механизма
1.5 Определение угловых скоростей и ускорений звеньев
1.6 Диаграммы движения выходного звена
1.7 Аналитический метод анализа рычажного механизма
2. Силовой анализ рычажного механизма
2.1 Определение сил инерции
2.2 Расчёт диады 4-5
2.3 Расчёт диады 2-3
2.4 Расчёт кривошипа
2.5 Определение уравновешивающей силы методом рычага Жуковского
2.6 Определение мощностей
2.7 Определение кинетической энергии и приведенного момента инерции механизма
2.8 Определение сил инерции
3. Геометрический расчёт прямозубой передачи. Проектирование планетарного редуктора
3.1 Геометрический расчёт прямозубой передачи
3.2 Синтез и анализ комбинированного зубчатого механизма
3.3 Построение плана скоростей и частот вращения звеньев зубчатого механизма
Список литературы
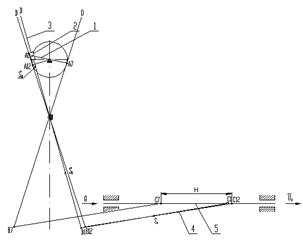
1. Кинематический анализ рычажного механизма
Исходные данные:
Ход долбяка:____________________ H=320 мм
Коэффициент производительности:_ K=1,3
Отношения длин звеньев :_________ О2О3/BO3=1,25; BC/BO3=1,8
Частота вращения кривошипа :_____ n =97 об/мин
1.1 Структурный анализ механизма
Степень подвижности механизма:
Для определения степени подвижности механизма воспользуемся формулой Чебышева.
W = 3k - 2p1 - p2
где k -число подвижных звеньев;
p1 -число одноподвижных кинематических пар;
p2 -число двухподвижных кинематических пар;
Для данного механизма: k = 5; p1 = 7; p2 = 0. Тогда
W = 3 · 5 – 2 · 7 – 0 = 1
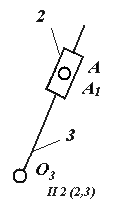
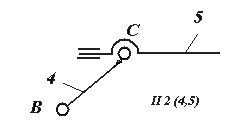
Разложение механизма на структурные группы Ассура :
Формула строения механизма : I(0,1)®II(2,3)®II(4,5)
Вывод: механизм II класса.
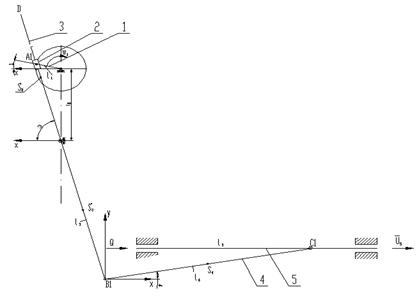
1.2 Определение недостающих размеров
Угол размаха кулисы:
β = 180˚·(k-1)/(k+1) = 180˚·(1,3-1)/(1,3+1) = 23028I
Угол рабочего хода:
φpx = β +1800 = 203º
Угол холостого хода:
φxx =1800- β = 154º
O3B=160/sin11o=786.8mm
O2O3=983.5 mm
Масштабный коэффициент построения схемы:
Kl = lO1A / O1A = 0,113 / 113 = 0,001
Строим 12 планов механизма, приняв за начало отсчёта крайнее положение, соответствующее началу рабочего хода механизма.
1.3 Определение скоростей точек механизма
Определим угловую скорость ω1 кривошипа по формуле :
ω1 = (π · nкр) / 30º = (3,14 · 132) / 30º = 13,816 рад/с
Определяем скорость точки А :
VA = ω1 · lO1A = 13,816 · 0,113 = 1,561 m/c
Масштабный коэффициент для плана скоростей :
KV = VA / PVA =1,561 / 50 = 0,003 m/c·mm
Для точки А’ (внутренней пары диады) напишем систему уравнений :
VA’ = VA + VA’A
VA’ = VO2 + VA’O2
Эту систему решаем графически:
VA’ = KV · PVA = 0,003 · 50 = 1,5 m/c
Скорость точки В находим методом подобия. Для этого составляем пропорцию :
PVB / PVA’ = O2B / O2A’
PVB = (O2B / O2A’) · PVA’ = (70 / 147) · 50 = 23,8 mm
Абсолютная величина скорости точки B:
VB = KV · PVB = 0,003 · 23,8 = 0,0714 m/c
Скорость точки С определяем графически, решая систему уравнений :
![]() VC = VB + VBC
VC = VB + VBC
VC =VO2 + VO2B
VC = KV · PVC = 0,003 · 24 = 0,072 m/c
1.4 Определение ускорений точек механизма
Ускорение точки А :
aA = an = ω12 · lO1A = 13,8162 · 0,113 = 0,2157 m/c2
aA направлен по кривошипу к центру вращения O1
Масштабный коэффициент для плана ускорений :
KA = aA / PAA = 0,2157 / 50 = 0,004 m/c2mm
Для точки А’ напишем систему уравнений :
![]()
![]()
![]()
![]()
![]() aA’ = aA + akA’A + aτA’A
aA’ = aA + akA’A + aτA’A
![]()
![]()
![]()
![]() aA’ = aO2 + anA’O2 + aτA’O2
aA’ = aO2 + anA’O2 + aτA’O2
Ускорения aA’A и aA’O2 раскладываем на составляющие :
akA’A = 2VA’A · ω3 = 2 · 0,15 · 1,02 = 0,306 m/c2
anA’O2 = V2A’O2 / lA’O2 = 0,153 m/c2
aτA’A = 0 (так как движение камня по кулисе прямолинейное);
Величина
PaakA’A = akA’A / KA = 0,0306 / 0,004 = 7,7 mm
PaanA’O2 = anA’O2 / KA = 0,153 / 0,004 = 38,25 mm
Далее ускорение точки А’ находим графически:
aA’ = PAA’ · KA = 50 · 0,004 = 0,2 m/c2
Ускорение точки В находим методом подобия: PAB / PAA’ = O2B / O2A’
PAB = (O2B / O2A’) · PAA’ = (70 / 147) · 50 = 23,8 mm
Абсолютная величина ускорения точки B:
aB = PAB · KA =23,8 · 0,004 = 0,095 m/c2
Ускорение точки С определяем графически, решая систему уравнений :
![]() aC = aB + aBC + aτB
aC = aB + aBC + aτB
aC = aO2 + aO2C + anB
anB = V2B / lO2B = 0,07142 / 0,07 = 0,0728 m/c2
aτB = PτAB · KA = 40 · 0,004 = 0,16 m/c2
Абсолютная величина ускорения точки С равна:
aC = PAC · KA = 58 · 0,004 = 0,232 m/c2
Похожие работы
... на VBA Ускорения Величина ускорения, м/с^2 0 1 2 3 4 5 6 7 8 9 10 11 12 Расчётные 4.4 2.54 1,50 -0,351 -0.99 -1.19 -3,80 -3.91 -6.8 -6.31 1,28 6.99 4.4 Графические 4.36 2.41 1,60 -0.324 -0.96 -1.09 -3,90 -3.88 -6.7 -6.161 1,30 6.924 4.36 2. Силовой анализ механизма Исходные данные: масса кулисы ; масса шатуна ; масса ползуна . сила полезного ...





... расчет На рисунке 25 представлен результат термодеформационного расчета. Рисунок 25 – Контурное представление результата термодеформационного расчета 5. Расчет экономического эффекта от модернизации поперечно – строгального станка мод. 7307 5.1 Исходные данные для расчета экономического эффекта от модернизации Проведенная модернизация поперечно-строгального станка мод. 7307 ...
... канавок, отрезки и других работ, которые могут быть выполнены перемещением поперечного суппорта, а также кронштейн 3 с щитком 4, защищающим рабочего от попадания стружки и смазочно-охлаждающей жидкости. Токарный станок имеет весьма древнюю историю, причем с годами его конструкция менялась очень незначительно. Приводя во вращение кусок дерева, мастер с помощью долота мог придать ему самую ...
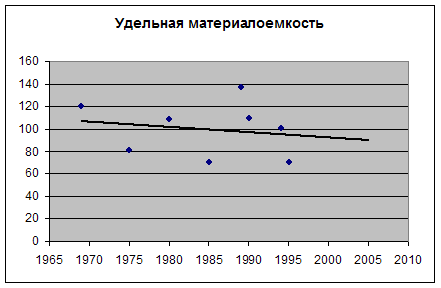
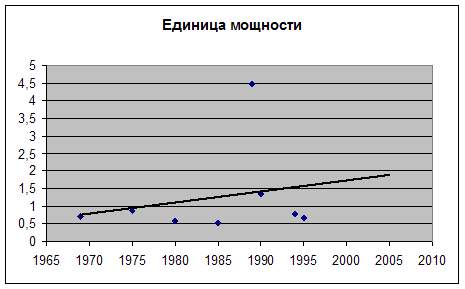
... . С определенной долей вероятности мы можем утверждать, что значение критерия снизится и составит 90 кг/мм. Полученная кривая свидетельствует об очевидном росте единицы мощности, приходящейся на единицу массы зубострогального станка. Прибегая к помощи метода аппроксимации, можно предположить возможное значение данного параметра в 2005 году, которое составит 1,9 Вт/кг. С помощью метода ...
0 комментариев