Навигация
Разработка алгоритма управляющей программы
21496
знаков
1
таблица
3
изображения
4 Разработка алгоритма управляющей программы
Вне зависимости от задач, выполняемых микроконтроллером, алгоритм управляющей программы, как правило, состоит из двух частей:
- начальная загрузка регистров и значений переменных, инициализация внешних устройств;
- бесконечный цикл, в котором обычно происходит опрос внешних сигналов и обновление информации как для внутренних регистров, так и для внешних устройств.
У электронных весов должно быть два режима работы: режим взвешивания и режим редактирования цены за единицу продукции. Чтобы их различать, введен специальный байт status. При сбросе весы должны находиться в режиме редактирования, контроллер в этом режиме, ожидает ввода значения цены или ее подтверждения путем нажатия клавиши ввода. В режиме взвешивания контроллер пересчитывает значение стоимости взвешенной продукции в зависимости от веса и цены.
Для отображения чисел на экране необходима специальная подпрограмма, преобразующая число в последовательность выводимых символов.
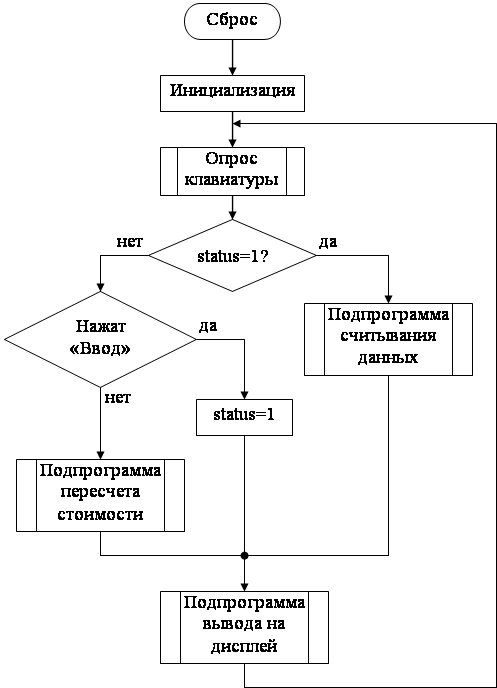
Рисунок 4.1 – Схема алгоритма прикладной программы
5 РАЗРАБОТКА СХЕМЫ ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ
Схема электрическая принципиальная полностью приведена в приложении.
При использовании контроллера Atmega16 фирмой-производителем рекомендовано использовать параллельно каждой паре выводов питания подсоединять помехозащищающий конденсатор емкостью не менее 1мкФ. На схеме эти конденсаторы обозначены C1 и C2, выбран тип К10-17–10В–1мкФ±10%. Между линией RESET и плюсом питания подключается резистор с типовым значением 10 кОм (на схеме – R1), между линией RESET и минусом питания – конденсатор емкостью 1мкФ (на схеме – C4). Такая схема позволяет избежать ложного сброса микроконтроллера.
Параллельно линиям XTAL1 и XTAL2 подсоединяется кварцевый резонатор, частота которого для данного микроконтроллера обычно равна 16МГц. Между минусом питания и линиями XTAL1 и XTAL2 ставятся конденсаторы емкостью (20..30) пФ (на схеме – C3 и C5).
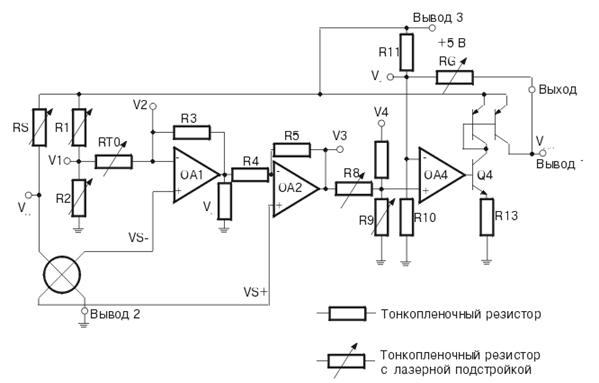
Для усиления сигнала с датчика веса следует применить измерительный усилитель. Схема такого устройства часто включает в себя несколько операционных усилителей, но может выпускаться в интегральном исполнении. В качестве измерительного усилителя выбрана микросхема INA128, которая в качестве дополнительных пассивных элементов требует только резистор для регулирования коэффициента усиления (на схеме – R2), определяемый по формуле:
![]() , (5.1)
, (5.1)
где K – требуемый коэффициент усиления.
Например, при K=100 рассчитанное по формуле значение RG равно 505 Ом, оно округляется до значения из ряда номиналов E6, равное 510 Ом. Лучше применять подстроечный резистор с целью калибровки коэффициента усиления.
В клавиатурной матрице опрашиваемые линии должны быть подтянуты к плюсу питания через резисторы, типовое значение которых равно 10кОм (на схеме – R4–R6).
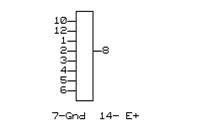
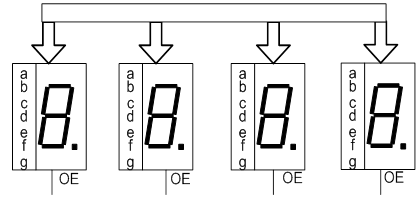
Для отображения информации выбраны семисегментные индикаторы SA04-11 с общим анодом, каждый из которых потребляет максимальный ток 160мА, каждый сегмент потребляет ток Iсег=20мА. Сопротивление, ограничивающее ток линии PD7, рассчитывается по формуле:
 , (5.2)
, (5.2)
Округляя значение сопротивления до стандартного, получаем R3=130Ом.
Выход дешифратора К1564ИД5, разрешающий работу отдельно взятого индикатора, не обеспечивает такого тока, поэтому следует применить схему с усилительным каскадом, изображенную на рис. 5.1. Работа семисегментного индикатора разрешена, когда с выхода дешифратора приходит низкий уровень. При этом между базой и эмиттером транзистора подается смещение, задаваемое делителем напряжения, состоящим из резисторов R1 и R3, включенного параллельно с сопротивлением эмиттерного перехода со стороны базы. Резистор R2 ограничивает ток.
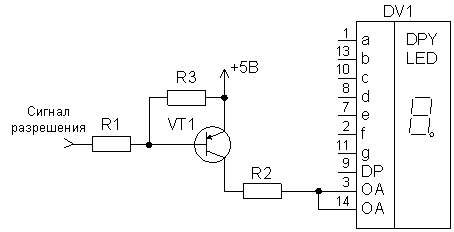
Рис. 5.1 – Схема согласования по току дешифратора с семисегментным индикатором.
Для данной схемы можно выбрать транзистор К501 с максимальным током коллектора 300мА.
Если принять ток через R3 равным току базы, то величина этого сопротивление определиться по формуле:
 (5.3)
(5.3)
где b – коэффициент передачи по току в схеме с общим эмиттером, для К501 можно принять равным 50;
Uбэ – напряжение, необходимое для открытия транзистора, обычно равно (0,8..0,9)В;
Iк – ток коллектора, в данном случае равен току, потребляемому индикатором;
Rбэ – сопротивление эмиттерного перехода со стороны базы.
 .
.
Округляя значение сопротивления до стандартного, получаем R3=300Ом.
R1 рассчитывается по формуле:
 , (5.4)
, (5.4)
где Uп – напряжение питания.

Округляя значение сопротивления до стандартного, получаем R1=680Ом
R2 рассчитывается по формуле:
 , (5.5)
, (5.5)
где Uд – падение напряжение на индикаторе, равно 2,5В.
Выводы 4 микросхемы К514ИД1, 18 и 19 микросхемы К1564ИД5 подсоединяются к минусу питания для разрешения их работы.
Извне на устройство управления через разъем XP1 подаются: сигнал датчика, напряжение питания +5В, -5В (для усилителя), общий провод питания.
Похожие работы
... условия на модуль МПС16 инструкции по эксплуатации или технические описания средств измерений и контроля. Перечень средств измерения и контроля, инструмента, применяемых при проведении настройки субблока модуля управления МПС, приведен в таблице 6. Таблица 6 Наименование Тип или обозначение Количество Технологический модуль МПС16-01 (без ячейки ЯМ101) АГКР.465653.001 1 Источник ...
... их на соответствующий порт, также необходимо вывести десятичную точку P2.7. Заключение В результате проделанной работы были разработаны электронные весы с диапазоном измерения от 0 до 250 килограмм, с точностью измерения 500 грамм, с микропроцессорным управлением. Точность измерения не зависит от положения объекта на весах. Габаритные размеры весов 5000x5000 мм. Электронные весы работают от ...
... показана на рисунке 8.4 Величина резистора R выбирается из условия [12] 240 Ом < R < 1,5 кОм.(8.5) Рисунок 8.4 Период генерируемых импульсов (8.6) 9. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА КОМПЬЮТЕРНОЙ (ЦИФРОВОЙ) ЭЛЕКТРОНИКИ 9.1 Комбинационные цифровые устройства (КЦУ) Логические устройства, выходные сигналы которых однозначно определяются комбинацией входных логических ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
0 комментариев