Навигация
Мікроконтролери RISC архітектури
22460
знаков
0
таблиц
9
изображений
Полтавський Військовий Інститут Зв’язку
Кафедра схемотехніки радіоелектронних систем
ЛЕКЦІЯ
ОБЧИСЛЮВАЛЬНА ТЕХНІКА ТА МІКРОПРОЦЕСОРИ
Мікропроцесорні системи.
Контролери в телекомунікаціях.
Мікроконтролери RISC архітектури.
Полтава – 2006
Навчальна література:
1. Мікропроцесорна техніка: Підручник/ Ю.І. Якименко та інш. – К.: ІВЦ Політехніка; Кондор, 2004. с. 379-395.
2. Схемотехніка електронних систем: У з кн. Кн. 3. Мікропроцесори та мікро контролери: Підручник/ В.І. Бойко, А.М. Гуржій, В.Я. Жуйков та ін. – 2-е вид. – К: Вища шк., 2004. с. 338 – 356 с.
ВСТУП
CISC МК характеризуються досить розвиненою системою команд, наприклад, МК серії і80х51 мають 111 команд. Однак аналіз програм показав, що 20% з них використовується в 80% випадків, а дешифратор команд займає більше 70% площі кристалу. Команди достатньо складні і виконуються за різний час. Тому у розробників виникла ідея скоротити кількість команд, надати їм єдиний формат і зменшити площу кристала, тобто використати RISC (Reduced Instruction Set Computer) архітектуру.
Особливістю МК, виконаних за RISC архітектурою, є те, що всі команди виконуються за один-три такти, тоді як у CISC контролерах – за один-три машинних цикли, кожний з яких складається з кількох тактів, наприклад для і80х51 – з 12 тактів. Тому RISC контролері мають значно більшу швидкодію. Однак повніша система команд CISC контролерів у деяких випадках сприяє економії часу виконання певних фрагментів програми та економії пам’яті програм.
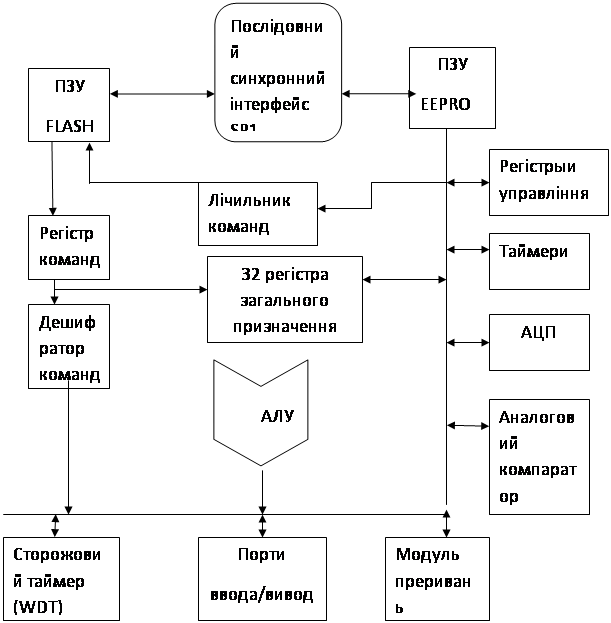
1. Особливості МК RISC архітектури
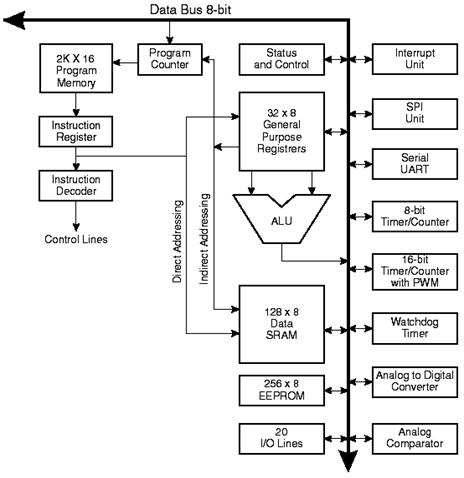
У процесорах з RISC-архітектурою набір команд, що виконуються, скорочений до мінімуму. До МК із RISC-процесором відносяться МК AVR фірми Atmel, МК PIC16 і PIC17 (Peripheral Interface Controller) фірми Microchip і інші.
RISC МК мають наступні характерні риси.
1. Всі команди мають формат фіксованої довжини (наприклад, 12, 14 або 16 біт).
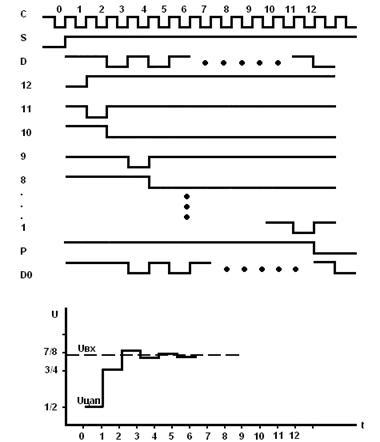
2. Вибірка команди з пам'яті і її виконання здійснюється за один цикл (такт) синхронізації, що ілюструється рис. 1.
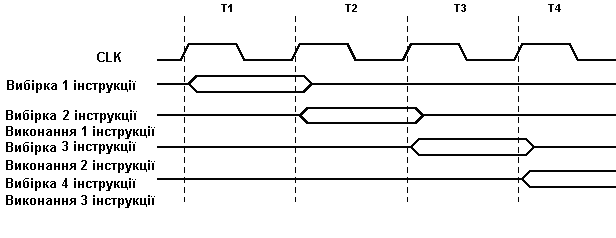
Рис. 1. Паралельні вибірки і виконання інструкцій.
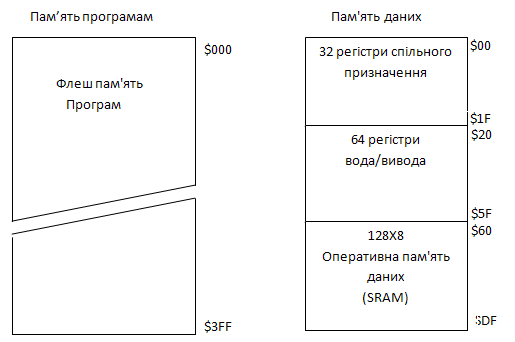
3.Система команд процесора припускає можливість рівноправного використання всіх регістрів процесора. У МК із RISC-процесором усі регістри (часто й акумулятор) розташовуються по адресах, що явно задаються. Це забезпечує додаткову гнучкість при виконанні ряду операцій.
На перший погляд, МК із RISC-процесором повинні мати більш високу продуктивність у порівнянні з CISC МК при одній і тій же тактовій частоті внутрішньої магістралі ВКМ. Однак на практиці питання про продуктивність більш складне і неоднозначне.
По-перше, оцінка продуктивності МК за часом виконання команд різних систем (RISC і CISC) не зовсім коректна. Звичайно продуктивність МП і МК прийнято оцінювати числом операцій пересилання «регістр-регістр», що можуть бути виконані протягом однієї секунди. У МК із CISC-процесором час виконання операції «регістр-регістр» складає від 1 до 3 циклів, що, здавалося б, уступає продуктивності МК із RISC-процесором. Однак прагнення до скорочення формату команд RISC-процесора приводить до змушеного обмеження числа доступних в одній команді регістрів. Так, наприклад, системою команд МК PIC16 передбачена можливість пересилання результату операції тільки в один із двох регістрів — регістр-джерело операнда або робочий регістр. Таким чином, операція пересилання вмісту одного з доступних регістрів в іншій (не джерело операнда і не робочий) потребує використання двох команд. Така необхідність часто виникає при пересиланні вмісту одного з регістрів загального призначення (РЗП) в один з портів МК. У той же час, у системі команд більшості CISC-процесорів присутні команди пересилання вмісту РЗП в один з портів введення-виведення. Тобто більш складна система команд іноді дозволяє реалізувати більш ефективний спосіб виконання операції.
По-друге, оцінка продуктивності МК по швидкості пересилання «регістр-регістр» не враховує особливостей конкретного реалізованого алгоритму керування. Так, при розробці швидкодіючих пристроїв автоматизованого керування основну увагу варто приділяти часу виконання операцій множення і розподілу при реалізації рівнянь різних передаточних функцій. А при реалізації пульта дистанційного керування побутовою технікою варто оцінювати час виконання логічних функцій, що використовуються при опитуванні клавіатури і генерації послідовної кодової посилки керування. Тому в критичних ситуаціях, що вимагають високої швидкодії, варто оцінювати продуктивність на множині тих операцій, що переважно використовуються в алгоритмі керування і мають обмеження за часом виконання.
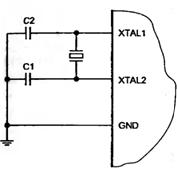
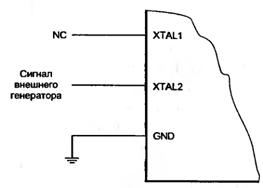
По-третє, необхідно ще враховувати, що зазначені в довідкових даних на МК частоти синхронізації звичайно відповідають частоті кварцового резонатора, що підключається, у той час як тривалість циклу центрального процесора визначається частотою обміну по ВКМ. Співвідношення цих частот індивідуально для кожного МК і повинно бути прийняте в розрахунок при порівнянні продуктивності різних моделей контролерів.
Похожие работы
... команду для виконання необхідної операції. Вибірка команди на виконання здійснюється побайтно протягом декількох циклів роботи МК. Час виконання команди може складати від 1 до 12 циклів. До МК із CISC-архітектурою відносяться МК фірми Intel з ядром MCS-51, що підтримуються в даний час великою кількістю виробників. Схема синхронізації МК забезпечує формування сигналів синхронізації, необхідних ...
... вводу-виводу, блок спряження із ПЕОМ та інші пристрої, що забезпечують роботу того чи іншого модулю. 1. Розробка структурної схеми МПС В даній курсовій роботі розробляється система управління та керування об’єктом на базі одно кристального RISK AVR-мікроконтролера (МК) ATMega1281V-8AU , що складається з: - Системи аналогового вводу інформації; - Системи аналогового виводу інформації; - ...

... і і вибір апаратних засобів; 2) розробка прикладного програмного забезпечення; 3) комплексування апаратних засобів і програмного забезпечення; Дана робота присвячена розробці мікропроцесорного АЦП порозрядного врівноваження із ваговою надлишковістю, що калібрується. 1. Аналіз технічного завдання Для з’ясування вимог до технічного завдання, доцільно навести структуру АЦП порозрядного врі ...
... дображення стану систем і т. п. В курсовому проекті я розробляю лічильник, який рахує число людей. 1.Основна частина 1.1 Розробка технічного завдання Загальні відомості: Мікропроцесорній пристрій, який рахує число імпульсів готової продукції. Призначення розробки: розробка МПС з навчальною метою. Вимоги до МПС: Тип МК ATtiny2313, індикація на 2 розряда, число імпульсів – 10, індикац ...
0 комментариев