Навигация
Мікроконтролери CISC архітектури
26897
знаков
1
таблица
5
изображений
Полтавський Військовий Інститут Зв’язку
Кафедра схемотехніки радіоелектронних систем
ОБЧИСЛЮВАЛЬНА ТЕХНІКА ТА МІКРОПРОЦЕСОРИнапрям підготовки 0924 «Телекомунікації»
Мікропроцесорні системи.
Контролери в телекомунікаціях.
Мікроконтролери CISC архітектури.
Полтава – 2006
Навчальна література:
1. Мікропроцесорна техніка: Підручник/ Ю.І. Якименко та інш. – К.: ІВЦ Політехніка; Кондор, 2004. с. 323-352.
2. Схемотехніка електронних систем: У з кн. Кн. 3. Мікропроцесори та мікро контролери: Підручник/ В.І. Бойко, А.М. Гуржій, В.Я. Жуйков та ін. – 2-е вид. – К: Вища шк., 2004. – 399 с.
ВСТУП
У дійсний час діапазон застосування мікропроцесорної техніки постійно поширюється, до МПС різноманітного призначення типів пред'являються самі різні вимоги. Тому сформувалося кілька типів МПС, що розрізняються потужністю, універсальністю, швидкодією і структурними відмінностями. Основні типи МПС наступні:
- МК – найбільш простий тип МПС, у яких всі або більшість вузлів системи (процесор, пам’ять даних і програм, програмовані інтерфейси) виконані у вигляді однієї великої інтегральної мікросхеми (ВІС). Системна шина МК «схована» від користувача усередині мікросхеми. Можливості підключення зовнішніх пристроїв до МК обмежені. МК – це пристрої, що практично завжди використовуються не самі по собі, а в складі більш складних пристроїв (наприклад, контролерів). Пристрої на МК звичайно призначені для рішення однієї конкретної задачі або обмеженого кола задач – як правило, керування і регулювання;
- контролери – керуючі МПС, звичайно будуються на основі МК; створюються для рішення якоїсь окремої задачі або групи близьких задач. Структура контролера проста й оптимизована для досягнення максимальної швидкодії. Конструктивно контролери випускаються в одноплатному (модульному) виконанні.
- мікрокомп'ютери – більш потужні МПС з розвитими засобами сполучення з зовнішніми пристроями. Вони відрізняються від контролерів більш відкритою структурою, допускають підключення до системної шини декількох додаткових пристроїв. Мікрокомп'ютери можуть маті засоби збереження інформації на магнітних носіях і засоби зв'язку з користувачем (монітор, клавіатура). Мікрокомп'ютер розрахований на вирішення широкого кола задач, але до нової задачі його треба «пристосовувати» заново;
- комп'ютери – найбільш універсальні МПС. Вони обов'язково передбачають можливість модернізації, а також широкі можливості підключення нових пристроїв. Їхня системна шина звичайно доступна користувачеві. Крім того, зовнішні пристрої можуть підключатися до комп'ютера через кілька вбудованих портів зв'язку. Комп'ютер завжди має розвинуті засоби: зв'язку з користувачем, збереження інформації великого обсягу, зв'язку з іншими комп'ютерами.
Будь-яку задачу в принципі можна виконати за допомогою кожного з перерахованих типів МПС. Але при виборі типу МПС необхідно, з одного боку, уникнути надмірності, з другого – забезпечити необхідну для даної задачі гнучкість системи.
В дійсний час при розробці нових МПС найчастіше вибирають шлях використання МК (приблизно в 80% випадків). Однокристальні МК (ОМК) є зручним інструментом для створення сучасних вбудованих пристроїв керування різним обладнанням, наприклад, автомобільною електронікою, побутовою технікою, мобільними телефонами тощо.
Класичні МПС на базі мікросхем мікропроцесорних комплектів випускаються зараз досить рідко, через складність розробки і налагодження цих систем. Даний тип МПС вибирають в основному тоді, коли МК не можуть забезпечити необхідних характеристик.
1. Загальні відомості про МК 1.1. Класифікація і загальні архітектурні риси МК
Основні вимоги, що споживачі пред'являють до ОМК можна сформулювати в такий спосіб:
- низька вартість,
- висока надійність,
- високий ступінь мініатюризації,
- мале енергоспоживання,
- працездатність у жорстких умовах експлуатації;
- достатня продуктивність для виконання всіх необхідних функцій.
Виконання всіх цих суперечливих умов одночасно важко, тому розвиток і удосконалення ОМК пішло шляхом спеціалізації, і в даний час кількість моделей ОМК надзвичайно велика. Однак можна виділити деякі архітектурні риси, які є загальними практично для всіх сучасних МК:
- система команд ОМК зорієнтована на виконання задач керування і регулювання;
- алгоритми, що реалізуються на ОМК, мають багато розгалужень залежно від зовнішніх сигналів (подій);
- дані, з якими оперують ОМК, мають невелику розрядність;
- універсальність і можливість розширення функцій керування значно нижчі, ніж у системах з МП;
- інтеграція в одному корпусі мікросхеми (на одному кристалі) практично всіх блоків МПС – ПЗП, ОЗП, пристроїв введення-виведення, тактового генератора, контролера переривань і т.д. Тому в вітчизняної літературі МК часто називають однокристальними ЕОМ.
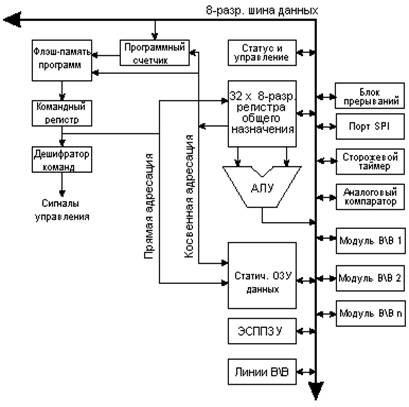
- побудова більшості МК на основі гарвардської архітектури (використання роздільних областей пам’яті та шин для збереження і передавання даних та команд).
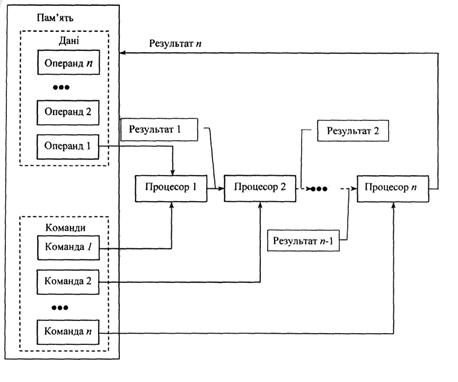
Взагалі, сучасні МК, як і інші МПС, будуються на основі однієї з двох базових архітектур: фон-нейманівської або гарвардської.
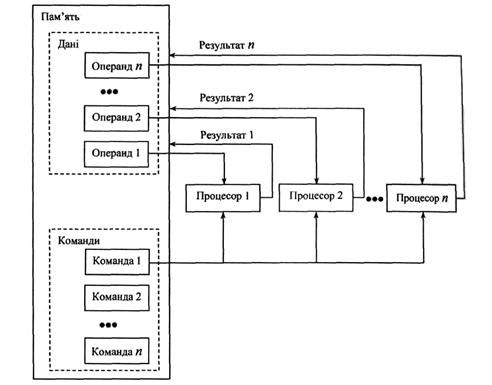
В архітектурі фон-Неймана використання єдиної області пам'яті дозволяє оперативно перерозподіляти ресурси між областями програм і даних, що істотно підвищує гнучкість МПС із точки зору розроблювача програмного забезпечення. Розміщення стека в загальній пам'яті полегшує доступ до його вмісту. Невипадково тому фон-нейманівська архітектура стала основною архітектурою універсальних комп'ютерів.
Гарвардська архітектура майже не використовувалася до кінця 70-х років, поки виробники МК не зрозуміли, що вона дає суттєві переваги розроблювачам систем керування.
Справа в тому, що для реалізації більшості алгоритмів керування такі переваги фон-нейманівської архітектури як гнучкість і універсальність не мають великого значення. Аналіз реальних програм керування показав, що необхідний обсяг пам'яті даних МК, використовуваний для збереження проміжних результатів, як правило, на порядок менше необхідного обсягу пам'яті програм. У цих умовах використання єдиного адресного простору приводить до збільшення формату команд за рахунок збільшення числа розрядів для адресації операндів. Застосування окремої, невеликої за обсягом пам'яті даних сприяло скороченню довжини команд і прискоренню пошуку інформації в пам'яті даних.
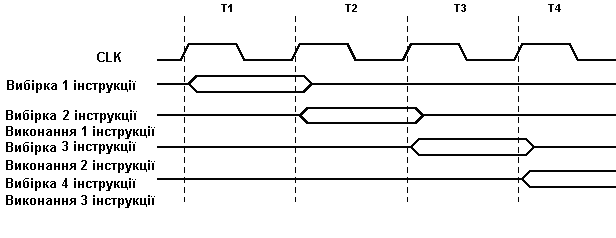
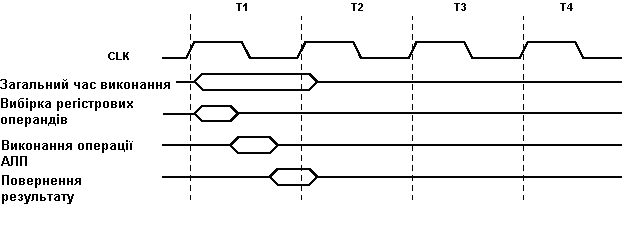
Гарвардська архітектура забезпечує потенційно більш високу швидкість виконання програми в порівнянні з фон-нейманівською за рахунок паралельної реалізації деяких операцій. Наприклад, вибірка наступної команди може відбуватися одночасно з вибіркою операндів для виконанням попередньої, і немає необхідності «зупиняти» АЛП процесора на час вибірки команди. Це надає можливость забезпечувати виконання різних команд за однакове число тактів.
Однак, гарвардська архітектура є недостатньо гнучкою для реалізації деяких програмних процедур. Тому порівняння МК, виконаних на основі різних архітектур, варто проводити стосовно до конкретних задач.
МК звичайно класифікують по розрядності оброблюваних чисел:
- чотирирозрядні – найпростіші і найдешевші;
- восьмирозрядні – найбільш чисельна група, що забезпечує оптимальне співвідношення вартості і можливостей; до цієї групи відносяться МК серії MCS-51 (Intel) і сумісні з ними, PIC (MicroChip), HC68 (Motorola), Z8 (Zilog) та ін.;
- шістнадцатирозрядні – MCS-96 (Іntel) та ін. – більш високопродуктивні;
- тридцатидворозрядні – звичайно є модифікаціями універсальних мікропроцесорів, використовуються для вирішення найбільш складних задач (наприклад, адаптивного керування).
Найбільш розповсюджені у дійсний час восьмирозрядні ОМК, широко використовувані в промисловості, побутовій і комп'ютерній техніці. Причиною життєздатності 8-розрядних МК є використання їх для керування реальними об'єктами, де застосовуються, в основному, алгоритми з переважно логічними (побітовими) операціями, швидкість виконання яких практично не залежить від розрядності процесора.
Сучасні 8-розрядні МК мають наступні особливості:
- модульна організація, при якій на базі одного процесорного ядра проектується ряд (лінійка) МК, що розрізняються обсягом і типом пам'яті програм, обсягом пам'яті даних, набором периферійних модулів, частотою синхронізації;
- використання закритої архітектури МК. Тобто МК являє собою закінчену систему обробки даних, нарощування можливостей якої з використанням паралельних магістралей адреси і даних не передбачається;
- використання типових функціональних периферійних модулів (таймери, процесори подій, контролери послідовних інтерфейсів, АЦП й ін.), що мають незначні відмінності в алгоритмах роботи в МК різних виробників;
- декілька режимів функціонування периферійних модулів, що задаються в процесі ініціалізації регістрів спеціальних функцій МК.
Похожие работы
... повинно бути прийняте в розрахунок при порівнянні продуктивності різних моделей контролерів. 2. Однокристальні AVR-мікроконтролери Архітектуру RISC МК розглянемо на прикладі AT90S 2313. Це малопотужний восьмирозрядний КМОП МК, заснований на розширеній AVR RISC-архітектурі. Він належить до сім’ї AVR-МК загального призначення і створений дослідницьким центром фірми Atmel Corp. (Норвег ...
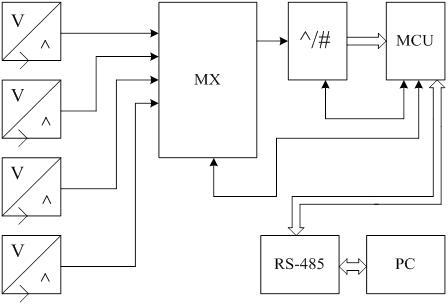

... габаритність та точність. Розглянемо першу структурну схему, яка приведена на рисунку 2.1. Рисунок 2.1 – Перший варіант реалізації структурної схеми системи для визначення складу вихлопних газів автомобілів Позначення на схемі: V/ – датчик концентрації, який використовується для визначення концентрації вихлопних газів автомобілів; МХ – мультиплексор; – аналого-цифровий перетворювач; ...
... для розв'язання особливо складних науково-технічних задач, оброблення великих обсягів даних у реальному масштабі часу, моделювання складних систем, автоматизованого проектування складних об'єктів, а також у системах керування (промислових і військових). Макет найпотужнішого суперкомп'ютера ES (Earth Simulator) Центра моделювання Землі (Earth Simulator Center) у Йокогамі (Японія) показаний рис. ...
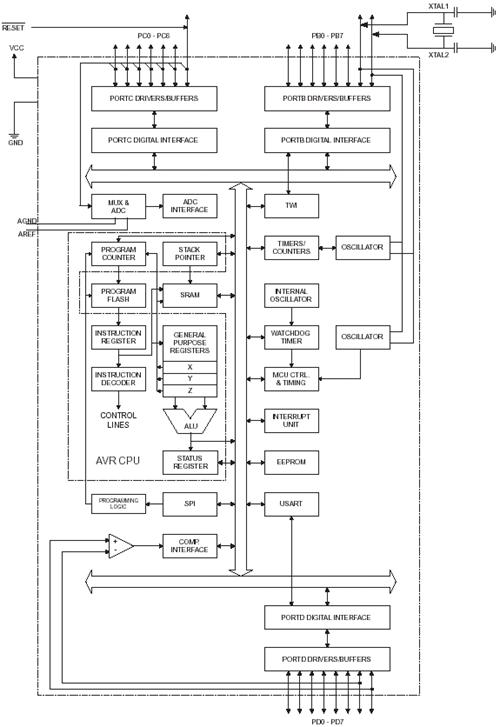
... вводу-виводу, блок спряження із ПЕОМ та інші пристрої, що забезпечують роботу того чи іншого модулю. 1. Розробка структурної схеми МПС В даній курсовій роботі розробляється система управління та керування об’єктом на базі одно кристального RISK AVR-мікроконтролера (МК) ATMega1281V-8AU , що складається з: - Системи аналогового вводу інформації; - Системи аналогового виводу інформації; - ...
0 комментариев