Классификация систем реального времени
Основные свойства задач
Минимальные размеры кода и данных. Кроме того, в отличие от алгоритмов с вытеснением, для всех задач необходим только один стек
Связанные задачи
Запретить прерывания на время доступа к разделяемым данным. Кардинальное решение, которое, впрочем, не приветствуется в системах реального времени
Стремление обеспечить максимально быструю и детерминированную реакцию системы на внешнее событие
Навигация
Классификация систем реального времени
Основные понятия и программное обеспечение систем реального времени
47787
знаков
0
таблиц
3
изображения
2. Классификация систем реального времени
Принято различать системы «жесткого» и «мягкого» реального времени.
1. Системой «жесткого» реального времени называется система, где неспособность обеспечить реакцию на какие-либо события в заданное время является отказом и ведет к невозможности решения поставленной задачи. Последствия таких отказов могут быть разные, от пролива драгоценной влаги на линии по розливу алкогольных напитков до более крупных неприятностей, если, например, вовремя не сработала система аварийных блокировок атомного реактора. Многие теоретики ставят здесь точку, из чего следует, что время реакции в «жестких» системах может составлять и секунды, и часы, и недели. Однако большинство практиков считают, что время реакции в системах «жесткого» реального времени должно быть все-таки минимальным. Идя на поводу у практиков, так и будем считать. Разумеется, однозначного мнения о том, какое время реакции свойственно «жестким» системам, нет. Более того, с увеличением быстродействия микропроцессоров это время имеет тенденцию к уменьшению, и если раньше в качестве границы называлось значение 1 мс, то сейчас, как правило, называется время порядка 100 мкс.
2. Точного определения для «мягкого» реального времени не существует, поэтому будем считать, что сюда относятся все системы реального времени, не попадающие в категорию «жестких». Так как система «мягкого» реального времени может не успевать ВСЁ делать ВСЕГДА в заданное время, возникает проблема определения критериев успешности (нормальности) ее функционирования. Вопрос этот совсем не простой, так как в зависимости от функций системы это может быть максимальная задержка в выполнении каких-либо операций, средняя своевременность отработки событий и т. п. Более того, эти критерии влияют на то, какой алгоритм планирования задач является оптимальным. Вообще говоря, системы «мягкого» реального времени проработаны теоретически далеко не до конца.
3. Ядра и операционные системы реального времени
Чтобы быстрее перейти к делу, примем как очевидные следующие моменты:
1. Когда-то операционных систем совсем не было.
2. Через некоторое время после их появления возникло направление ОС РВ.
3. Все ОС РВ являются многозадачными операционными системами. Задачи делят между собой ресурсы вычислительной системы, в том числе и процессорное время.
Четкой границы между ядром (Kernel) и операционной системой нет. Различают их, как правило, по набору функциональных возможностей. Ядра предоставляют пользователю такие базовые функции, как планирование и синхронизация задач, межзадачная коммуникация, управление памятью и т. п. Операционные системы в дополнение к этому имеют файловую систему, сетевую поддержку, интерфейс с оператором и другие средства высокого уровня.
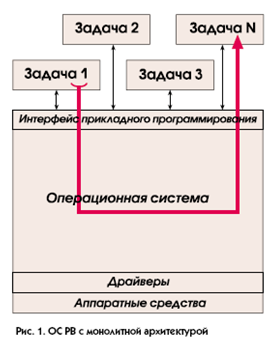
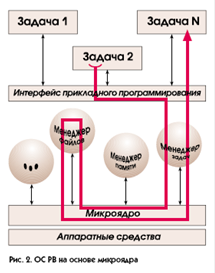
По своей внутренней архитектуре ОС РВ можно условно разделить на монолитные ОС, ОС на основе микроядра и объектно-ориентированные ОС. Графически различия в этих подходах иллюстрируются рисунками 1, 2, 3. Преимущества и недостатки различных архитектур достаточно очевидны, поэтому подробно мы на них останавливаться не будем.
Пользователь, напуганный перспективой изучать новую операционную систему, может здесь вполне резонно спросить: «А нельзя ли вообще обойтись без всех этих заумных вещей?»
Если отвечать на этот вопрос односложно, то да, МОЖНО. Однако ответ на вопрос о том, когда это НУЖНО делать, остается, конечно, за пользователем. Материалы этого реферата, возможно, дадут некоторую пищу к размышлениям на эту тему.

3.1. Задачи, процессы, потоки
Существуют различные определения термина «задача» для многозадачной ОС РВ. Мы будем считать задачей набор операций (машинных инструкций), предназначенный для выполнения логически законченной функции системы. При этом задача конкурирует с другими задачами за получение контроля над ресурсами вычислительной системы. Принято различать две разновидности задач: процессы и потоки. Процесс представляет собой отдельный загружаемый программный модуль (файл), который, как правило, во время исполнения имеет в памяти свои независимые области для кода и данных. В отличие от этого потоки могут пользоваться общими участками кода и данных в рамках единого программного модуля.
Хорошим примером многопоточной программы является редактор текста WORD, где в рамках одного приложения может одновременно происходить и набор текста, и проверка правописания.
3.1.1. Преимущества потоков
1. Так как множество потоков способно размещаться внутри одного ЕХЕ модуля, это позволяет экономить ресурсы как внешней, так и внутренней памяти.
2. Использование потоками общей области памяти позволяет эффективно организовать межзадачный обмен сообщениями (достаточно передать указатель на сообщение). Процессы не имеют общей области памяти, поэтому ОС должна либо целиком скопировать сообщение из области памяти одной задачи в область памяти другой (что для больших сообщений весьма накладно), либо предусмотреть специальные механизмы, которые позволили бы одной задаче получить доступ к сообщению из области памяти другой задачи.
3. Как правило, контекст потоков меньше, чем контекст процессов, а значит, время переключения между задачами-потоками меньше, чем между задачами-процессами.
4. Так как все потоки, а иногда и само ядро РВ размещаются в одном ЕХЕмодуле, значительно упрощается использование программ-отладчиков (debugger).
3.1.2. Недостатки потоков
1. Как правило, потоки не могут быть подгружены динамически. Чтобы добавить новый поток, необходимо провести соответствующие изменения в исходных текстах и перекомпилировать приложение. Процессы, в отличие от потоков, подгружаемы, что позволяет динамически изменять функции системы в процессе ее работы. Кроме того, так как процессам соответствуют отдельные программные модули, они могут быть разработаны различными компаниями, чем достигается дополнительная гибкость и возможность использования ранее наработанного ПО.
2. То, что потоки имеют доступ к областям данных друг друга, может привести к ситуации, когда некорректно работающий поток способен испортить данные другого потока. В отличие от этого процессы защищены от взаимного влияния, а попытка записи в «не свою» память приводит, как правило, к возникновению специального прерывания по обработке «исключительных ситуаций». Реализация механизмов управления процессами и потоками, возможность их взаимного сосуществования и взаимодействия определяются конкретным ПО РВ.
Похожие работы
... ресурсов компьютера между пользователями и задачами (система разделения времени) будет создана программная разработка планировщика задач, в котором главной целью является успеть среагировать на происходящие события в жестко заданный интервал времени (система реального времени). На основе планировщика будет реализован протокол, требующий поддержки реального времени. Для проектирования его ...
... . Объясните, для чего служат разрешения и привилегии в Windows NT. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету СИСТЕМНОЕ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ Билет № 22 Перечислите возможности и инструменты системы программирования Microsoft Developer Studio. Укажите для чего предназначается буфер в системах ввода-вывода, ...

... также невысока и обычно составляет около 100 кбайт/с. НКМЛ могут использовать локальные интерфейсы SCSI. Лекция 3. Программное обеспечение ПЭВМ 3.1 Общая характеристика и состав программного обеспечения 3.1.1 Состав и назначение программного обеспечения Процесс взаимодействия человека с компьютером организуется устройством управления в соответствии с той программой, которую пользователь ...


... реализации заложена в основу написания данной программы. В ходе выполнения данного дипломного проекта была разработана программа управления автоматизированным комплексом многоканальной связи. Предъявленные в техническом задании к проекту требования выполнены полностью: программное обеспечение для процессора АТ89С51 разработано в соответствии с общим алгоритмом ПО изделия ТС16Е1, ОЗУ данных ...
0 комментариев