От постановки задачи к исходной программе;
Адресные пространства АТ89С51
Характеристики средств языка ассемблера
Основы асинхронной последовательной связи
Общие методы ввода / вывода через коммуникационный порт
Составляющие программы
Тестирование и отладка программы
Этапы решения задачи на ЭВМ
Программирование
Отчет о работе
Реализация и испытания
Необходимость тестирования программных продуктов
Модульное тестирование
Диагностика функционирования комплексов программ
Организационно-экономическая часть
Затраты на изготовление опытного образца как продукции производственно-технического назначения
Составляющие затрат на сопровождение программ
Навигация
Программное обеспечение управления автоматизированным комплексом многоканальной связи
Программное обеспечение управления автоматизированным комплексом многоканальной связи
149178
знаков
9
таблиц
8
изображений
Введение
Данный дипломный проект выполнен на актуальную для предприятий-производителей устройств связи тему, тесно связанную с реальными планами исследований и производства, решая практическую задачу по разработке и внедрению программного обеспечения управления автоматизированным комплексом многоканальной связи. По своему характеру проект является опытно-конструкторским. Разработанное обеспечение для изделия ТС16Е1 полностью удовлетворяет техническому заданию. По своему содержанию дипломный проект соответствует современному уровню науки и техники. В процессе решения задачи создания программного продукта детально были рассмотрены особенности разработки программного обеспечения для микропроцессорных систем, устройство и принципы работы микропроцессоров серии МК51 вообще, интерфейсы в системах связи, основы асинхронной последовательной связи, общие методы ввода / вывода через коммуникационный порт и изучен информационный обмен контроллер-ЭВМ с использованием интерфейса RS‑232. Подробное описание структуры программы, алгоритмов построения и работы всех трех ее частей дает полное представление о ее создании, использовании и принципах работы. В технологической части разработки программных систем и программной документации освещены этапы решения задачи на ЭВМ, принципы тестирования программ и их отладка. Целый раздел посвящен вопросам надежности программного обеспечения. В организационно-экономической части расчета затрат на разработку программного продукта после подробного анализа составляющих затрат приведен расчет конкретно для этого программного продукта.1. Специальная часть
1.1 Постановка задачи проекта
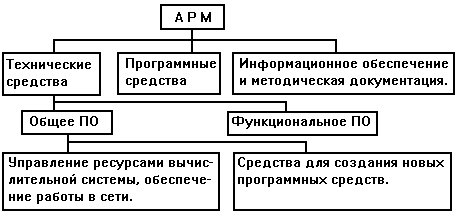
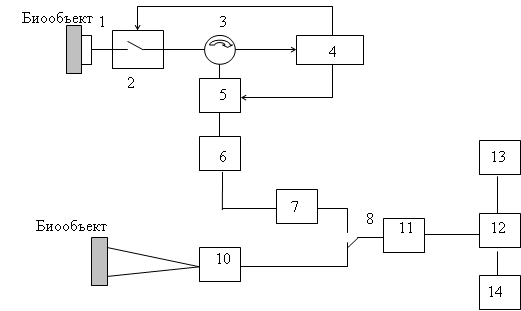
Целью представленного дипломного проекта является разработка программного обеспечения управления автоматизированным комплексом многоканальной связи, построенного на базе микроконтроллера AT89C51, представляющего собой высокопроизводительный микропроцессор, особенности которого будут рассмотрены ниже. Комплекс представляет собой 16 линейных интерфейсов, обеспечивающих связь через мультиплексор на входе и демультиплексор на выходе общего высокоскоростного канала связи. Каждый интерфейс является коммутатором связи еще нескольких десятков устройств связи. Структурная схема основных частей автоматизированного комплекса многоканальной связи представлена на рисунке 1.1.

|
|
|
![]()
![]()
![]()
![]() Е1
Е3, Е4
Е1
Е3, Е4
Рис. 1.1. Структурная схема основных частей комплекса
Блок линейных интерфейсов состоит из 16 независимых коммутаторных устройств, работающих с сигналами на скорости Е1. Каждый интерфейс имеет в своем составе 8 управляющих регистров, которые отображают состояние его работы. При изменении условий работы интерфейса, состояния линии связи или неполадок в самом устройстве регистры изменяют свое содержимое, благодаря чему можно однозначно определить причину неисправности.
Блок управления обеспечивает передачу данных регистров линейных интерфейсов на внешнюю ПЭВМ. Основной частью блока управления является микроконтроллер АТ89С51. Связь организуется через последовательный порт процессора Р3 по RS‑232‑му интерфейсу.
Мультиплексор и демультиплексор являются блоками передачи сгруппированного сигнала со скоростью Е3, Е4, работая в режиме дуплекса. На принимающей стороне стоят зеркально такие же демультиплексор и мультиплексор соответственно.
Внешняя ПЭВМ, общаясь через последовательный порт микроконтроллера АТ89С51 с блоком управления, получает необходимую информацию о состоянии работы всех 16‑ти линейных интерфейсов, контролируя таким образом весь комплекс удаленно. Для самой ПЭВМ таких комплексов может быть несколько.
Разработанное программное обеспечение позволит контролировать нормальную работу комплекса, взаимодействуя с внешней ПЭВМ по RS‑232‑му интерфейсу. К данному программному продукту предъявляются следующие требования:
1. Программное обеспечение для процессора АТ89С51 должно быть разработано в соответствии с общим алгоритмом ПО изделия ТС16Е1;
2. Использовать ОЗУ данных процессора АТ89С51 для хранения карты памяти состояний части битов регистров CR1, CR2, TSR и PSR 16‑ти линейных интерфейсов по заданным адресам в заданном порядке;
3. Обеспечить своевременное обновление карты памяти состояний части битов регистров CR1, CR2, TSR и PSR всех интерфейсов;
4. Обеспечить передачу карты памяти состояний оговоренных регистров, взаимодействуя с внешней ПЭВМ, используя интерфейс RS‑232, через последовательный порт Р3.
1.2 Особенности разработки программного обеспечения для микропроцессорных систем
В устройствах управления объектами на основе МП аппаратные средства и программное обеспечение существуют в форме неделимого аппаратно-программного комплекса. При проектировании контроллеров приходится решать одну из самых сложных задач разработки, а именно задачу оптимального распределения функций контроллера между аппаратными средствами и программным обеспечением. Решение этой задачи осложняется тем, что взаимосвязь и взаимовлияние аппаратных средств и программного обеспечения в микропроцессорной технике претерпевают динамичные изменения. Если в начале развития МП – техники определяющим было правило, в соответствии с которым аппаратные средства обеспечивают производительность, а программное обеспечение – дешевизну изделия, то в настоящее время это правило нуждается в серьёзной корректировке. Так как МП представляет собой стандартный массовый логический блок, конкретное назначение которого определяет пользователь с помощью программного обеспечения, то с ростом степени интеграции и, следовательно, функционально-логических возможностей МП резко понижается стоимость изделия в пересчёте на выполняемую функцию, что в конечном итоге и обеспечивает достижение высоких технико-экономических показателей изделий на МП. При этом затраты на разработку программного обеспечения изделия в 2 – 10 раз превышают затраты на приобретение и изготовление аппаратных средств.
В настоящее время наибольшее распространение получил методологический приём, при котором весь цикл разработки контроллеров рассматривается как последовательность трёх фаз проектирования:
1. Анализ задачи и выбора аппаратных средств контроллера;
2. Разработка прикладного программного обеспечения;
3. Комплексирование аппаратных средств и программного обеспечения в прототипе контроллера и его отладки.
Фаза разработки программного обеспечения, т.е. Фаза прикладных программ, в свою очередь, разбивается на два существенно различных этапа:
Похожие работы

... также невысока и обычно составляет около 100 кбайт/с. НКМЛ могут использовать локальные интерфейсы SCSI. Лекция 3. Программное обеспечение ПЭВМ 3.1 Общая характеристика и состав программного обеспечения 3.1.1 Состав и назначение программного обеспечения Процесс взаимодействия человека с компьютером организуется устройством управления в соответствии с той программой, которую пользователь ...
... первичной или первичной вместе со вторичной или только вторичной И. Если это - итог обработки информации, решения задачи, то такая информация называется результативной, результирующей. В процессе решения задач возникает промежуточная информация, которая часто в автоматизированных системах играет самостоятельную роль, определения направления путей завершения решения задачи. Результатная информация ...
еоценить значение МП и микроЭВМ при создании автоматизированных средств измерений, предназначенных для управления, исследования, контроля и испытаний сложных объектов. Развитие науки и техники требует постоянного совершенствования средств измерительной техники, роль которой неуклонно возрастает. Основные понятия и определения Понятия и определения, используемые в измерительной технике, ...
... питания, блока сопряжения с компьютером, компьютер, индикатор. Блок – схема радиоприемника представлена на рисунке.2.1. Рисунок 2.1 - Структурная схема дистанционного комплекса контроля функционального состояния 1 – приемник; 2 – дешифратора; 3 – детектора; 4 – усилителя; 5 – усилителя вертикального отклонения; 6 – электронно-лучевой трубки; 7 – задающего генератора ...
0 комментариев