Навигация
Метод максимальных площадей
34718
знаков
5
таблиц
0
изображений
1. Метод максимальных площадей.
2. Метод гистограмм.
Алгоритм был реализован с помощью библиотеки для обработки изображений OpenСV. При тестировании алгоритма использовались изображения игровой доски для игры в го с белыми и чёрными камнями. Пример его работы представлен на рис .
№ | Эталонное изображение | Исследуемое изображение | Разностное изображение | Бинаризированое изображение | Отфильтрованное изображение |
| 1 |
|
|
|
|
|
| 2 |
|
|
|
|
|
| 3 |
|
|
|
|
|

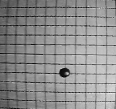

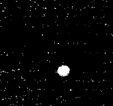

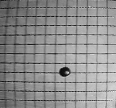
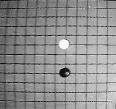



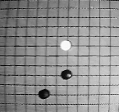

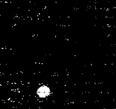

Рис. Пример работы алгоритма.
В первом столбце находятся изображения доски, являющиеся эталонными. Во втором столбце – исследуемыми. Из третьего столбца видно как изменилось положение камней на доске. В четвёртом и пятом столбцах показано соответственно результат бинаризации изображения третьего столбца и результат последовательных применений операций коррозии и эрозии к изображению в четвёртом столбце. 1.2. Метод максимальных площадейМетод приводит найденные объекты к форме, более удобной для дальнейшей обработки, и объединяет отдельные области на разностном изображении в области по признаку их близости друг другу [].
Необходимо выделить области правильной формы, являющиеся достаточно крупными объектами. Задачу можно формализовать следующим образом: необходимо разбить множество точек ![]() на максимально возможное число непересекающихся подмножеств
на максимально возможное число непересекающихся подмножеств ![]() .
.
Предложим следующий алгоритм решения:
1. На множестве ![]() конструируем подмножества
конструируем подмножества ![]() , содержащие связанные точки, выбранные как лежащие рядом друг с другом.
, содержащие связанные точки, выбранные как лежащие рядом друг с другом.
2. Конструируем новые подмножества ![]() , охватывающие те подмножества
, охватывающие те подмножества ![]() , которые лежат рядом друг с другом.
, которые лежат рядом друг с другом.
3. Повторяем пункт 2 до тех пор, пока не получим конечное количество подмножеств ![]() .
.
Метод был адаптирован и реализован функциями библиотеки OpenCV. Пример его работы представлен на рис.
| № | Разностное изображение
| Результат: области правильной формы | |
| Круг | Прямоугольник | ||
| 1 |
|
|
|
| 2 |
|
|
|
| 3 |
|
|
|
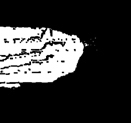
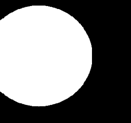





Рис. Пример работы алгоритма для разных областей правильной формы.
В первом столбце показаны изображения, полученные после алгоритма сравнения двух изображений. Во втором и третьем столбцах показаны результаты работы вышеописанного алгоритма. Во втором столбце в результате преобразований мы получаем область в виде круга, а в третьем в виде прямоугольника.
В первой и второй строке исходным является изображение руки. Как видно, область движения руки не является однородной. В результате работы алгоритма, область движения руки сводиться к однородной области правильной формы (круг, прямоугольник).
В третьей строке исходным является изображение камня на игровой доске. Аналогично, в результате работы алгоритма область движения камня сводиться к однородной области правильной формы (круг, прямоугольник). 1.3 Метод гистограммВ методе используется гистограмма изображения искомого объекта для нахождения объекта с такими же цветовыми характеристиками на серии изображений.
Нужно построить изображение в оттенках серого цвета, содержащее необходимые нам объекты.
Введём оператор, который преобразует функцию яркости изображения ![]() в функцию количественного распределения пикселей с определенным значением яркости (гистограмму)
в функцию количественного распределения пикселей с определенным значением яркости (гистограмму)![]() (где k – численное значение яркости):
(где k – численное значение яркости):
![]()
Обратный оператор ![]() преобразует гистограмму в изображение в оттенках серого.
преобразует гистограмму в изображение в оттенках серого.
Алгоритм состоит из следующих этапов:
1. Построение гистограмм искомого объекта ![]() и исходного изображения
и исходного изображения ![]()
2. Формируем новую гистограмму, как нормированное произведение ![]() и
и ![]() :
: ![]()
3. Используя обратное преобразование ![]() , получаем двумерную функцию, которая является искомым изображением в оттенках серого:
, получаем двумерную функцию, которая является искомым изображением в оттенках серого: ![]()
Метод был адаптирован и реализован функциями библиотеки OpenCV. Результаты применения метода приведены на рис.
| Доска | Черный камень | Белый камень | ||
| Искомое изображение |
|
|
| |
| Гистограмма искомого изображения |
|
|
| |
| Исходное изображение | По гистограмме доски | По гистограмме черного камня | По гистограмме белого камня | |
| № |
|
|
|
|
| 1 | ||||
| 2 |
|
|
|
|
| 3 |
|
|
|
|








Искомыми изображениями являются изображения игровой доски, чёрного и белого камня. В таблице представлены их гистограммы.
Во всех трёх опытах к исходному изображению, содержащему область движения, применялся вышеописанный метод. В результате в каждом из опытов были получены три изображения. Каждое из изображений содержит область, в которой нахождение искомого объекта максимально, т.е. максимально количество белых пикселей в этой области 1.4. Подготовка изображения к распознаваниюС точки зрения задачи распознавания, более удобно использовать изображения объектов, имеющие одинаковый размер и приблизительно одинаковую ориентацию в пространстве. Однако, алгоритмы выделения объектов, возвращают объекты, искаженные перспективой – различных размеров и произвольно ориентированных на изображении.
Для приведения изображения найденного объекта к общему виду, необходимо повернуть его на нужный угол. В эталонных и исследуемых изображениях объектов находятся две контрольные точки, после чего изображения разворачивают, так чтобы вектора, соединяющие эти точки, совпали.
Контрольными точками могут быть, например:
1. Видимый центр изображения.
2. Центр масс изображения.
3. Точка, заметно отличающаяся от остальных по цвету.
4. Центр маркера, поставленного на объекте
и др.
Также, необходимо, привести эталонные и исследуемые изображения к одному размеру.
Перечисленные выше операции выполняются аффинными преобразованиями над матрицами изображений, общий вид которых:
Используются частные случаи аффинных преобразованияй:
1. Растяжение (сжатие) вдоль координатных осей, задаваемое в виде:
Растяжению вдоль соответствующей оси соответствует значение масштабного множителя большего единицы. В однородных координатах матрица растяжения (сжатия) имеет вид
 .
.
2. Поворот вокруг начальной точки на угол ![]() , описываемый формулой:
, описываемый формулой:
Матрица вращения (для однородных координат)
 .
.
3. Перенос, задаваемый простейшими соотношениями:

Матрица переноса имеет вид
 .
.
2. Задача распознавание объекта
Данное раздел включает в себя широкий класс задач, различающихся в основном тем, каким образом задаются характеристики объекта и в как требуется его классифицировать.
Методы, применяемые для решения поставленной задачи, во многом зависят от особенностей объекта, который требуется локализовать. Зачастую, постановка задачи неформальна – описать свойства нужного объекта в математических терминах бывает достаточно сложно, поэтому задание часто звучит, например, так - нужно найти на изображении все, похожее вот на "это" (картинка с примером). Или, даже просто словами – найти на изображении всех, скажем, божьих коровок. Соответственно, решение задачи заключается в формулировке свойств распознаваемого объекта и конструировании устойчивого метода нахождения объектов, отвечающих указанным свойствам.
В числе основных сложностей при решении данной задачи – большое разнообразие входных данных и трудность выделения общих свойств внешнего вида для объектов естественного происхождения. Объекты искусственного происхождения обычно распознавать значительно легче.
В методах описания свойств объекта для нахождения можно выделить два крайних направления:
Обобщение и использование эмпирических данных и правил об объекте (top-down, bottom-up)
Идея заключается в нахождении, обобщении и формулировке в математических терминах эмпирических наблюдений и правил о том, как на изображениях обычно выглядит интересующий нас объект. Продолжая пример с божьей коровкой, можно подметить следующее:
1. Божьи коровки обычно рыжего или красного цвета;
2. На спине у них обычно присутствует некоторое количество черных пятнен (можно также посчитать примерное соотношения размера пятен с размером насекомого);
3. Спина у них разделена на две половинки темной линией, обычно видимой. С одной из сторон этой линии у божьей коровки голова – темная, соотносящаяся по размерам с телом в некоторой пропорции;
4. Сверху божья коровка выглядит примерно как эллипс;
Хорошо, если известны дополнительные условия задачи и получения входных изображений, например:
1. Приблизительно известны ожидаемые размеры божьих коровок (то есть известно увеличение камеры и расстояние до снимаемого объекта);
2. Нас интересуют только божьи коровки, сидящие на листьях (значит, если принять, что листья зеленые, можно рассматривать только объекты, находящиеся на зеленом фоне);
Опираясь на перечисленные правила можно построить некий алгоритм их проверки и нахождения объектов на изображении, отвечающих этим правилам. Сложность заключается в том, что, во-первых, правила могут не описывать всех свойств объекта, во-вторых, правила могут выполняться не всегда, в-третьих, в процессе нахождения правил и их математической формулировке происходит ряд упрощений, уводя все дальше от вида реального объекта. Понятно, что успешность описанного метод напрямую зависит от фантазии и наблюдательности разработчика.
Моделирование внешнего вида объекта, использование инструментария распознавания образов (pattern recognition) .
Суть этого подхода заключается в вычислении некоторых числовых характеристик изображения моделируемого объекта (вектора признаков) и применение различных математических методов для определения "похожести" тестовых изображений на изображение объекта, основываясь на этих характеристиках.
Например, само изображение требуемого объекта можно напрямую представить как вектор в многомерном пространстве и натренировать некоторый классификатор с помощью набора примеров изображений объектов. Классификатор в данном случае означает некоторый инструмент, принимающий на вход изображение, представленное в виде вектора в многомерном пространстве, и выдающего на выходе некую информацию, классифицирующую входное изображение относительно некоторого признака.
Примеры часто используемых классификаторов:
1. Метод наименьших квадратов;
2. Прямое сравнение по какой-либо метрике пространства векторов признаков (например, сумме разности каждого элемента вектора) тестового изображения с изображениями-шаблонами (template-matching);
3. Нейросети (обычно для черно-белых изображений) – на входы нейросети подаются значения элементов вектора, на выходах формируется сигнал, классифицирующий объект на изображении;
4. Метод опорных векторов (support vector machines) – для распознавания изображений;
5. Моделирование многомерной функции распределения векторов признаков изображений объекта, оценка вероятности принадлежности тестового изображению к смоделированному распределению (факторный анализ, метод главных компонент, анализ независимых компонент, линейный дискриминантный анализ);
6. Деформируемые модели;
Прямое представление черно-белого изображения размера m*n в качестве вектора порождает пространство размерности m*n (яркость каждого пикселя – значение элемента вектора в таком пространстве). То есть изображение сравнительно небольшого разрешения (100x100) порождает пространство размерности 10,000. Работать в таком пространстве непросто, поэтому применяются различные методики снижения размерности, например метод главных компонент (principal components analysis, PCA)
Другие примеры характеристик (признаков) изображений, используемых для их классификации и распознавания:
Похожие работы
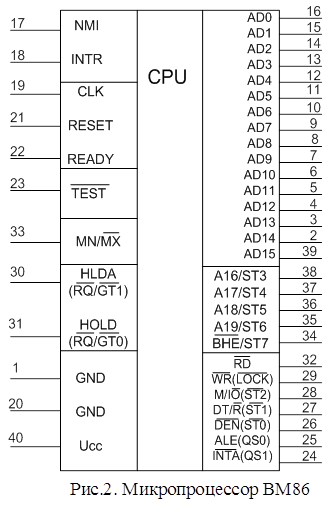
... и описание выводов которых приведено в следующем пункте курсовой работы. Выбор элементной базы Микросхема К1810ВМ86 Микропроцессор К1810ВМ86 представляет собой однокристальный 16-битовый МП работающий в данной вычислительной системе в минимальном режиме. Этот модуль производит чтение ПЗУ, а также чтение и запись в порты ввода-вывода. Условное графическое обозначение МП К1810ВМ86 ...

... также невысока и обычно составляет около 100 кбайт/с. НКМЛ могут использовать локальные интерфейсы SCSI. Лекция 3. Программное обеспечение ПЭВМ 3.1 Общая характеристика и состав программного обеспечения 3.1.1 Состав и назначение программного обеспечения Процесс взаимодействия человека с компьютером организуется устройством управления в соответствии с той программой, которую пользователь ...

... (САПР) и пр.; - ПС, используемые в обучении – электронные учебники, тренажеры, тесты и пр.; - игровые программы; - программы, созданные пользователем с помощью сред программирования. Еще один класс программного обеспечения – специальное ПО. Основное его отличие от системного ПО в том, что пользователь сам решает, будет ли он использовать эти ПС или нет, а отличие ...

... продукт предназначается для передачи информации о конструкции печатной платы из пакета PCAD в T-FLEX по сквозному маршруту проектирования для выработки дальнейших конструкционных решений и разработки деталей оснастки. 1. Состав программного обеспечения: · p-flex.exe : основной файл, осуществляющий всю работу; · gabarits.dbf : база данных в виде таблицы, куда заносятся все найденные ...
0 комментариев