Навигация
Тест перевірки окремих вузлів або пристроїв
27501
знак
0
таблиц
7
изображений
3.2 Тест перевірки окремих вузлів або пристроїв
Програма за якою працює мікропроцесор мовою асемблера АТ89С4051 має наступний вигляд:
__CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _XT_OSC
ORG 0
Goto PROGRAM
sec equ H'11' ; секунди
sec10 equ H'12' ; Десятки секунд
min equ H'13' ; минути
min10 equ H'14' ; Десятки минут
hour equ H'15' ; години
hour10 equ H'16' ; Десятки годин
Indicator equ H'17' ; 7-сегментний код для загрузки в регістр DD2
Bit_counter equ H'18' ; лічильник бітів, загруженних в регістр DD2
FLAGS equ H'19' ; різні прапорці
FLAGS_2 equ H'1F'
Fig_pointer equ H'1B' ; показник виведеної цифри
TEMP equ H'1C' ; для тимчасового збереження вмісту порту A
Ind_start equ H'1D' ; адреса комірки, яка першою виводиться на індикатор
SB_delay equ H'1E' ; часова затримка
STATUS_copy equ H'21' ; копії вмісту регістрів
W_copy equ H'22'
FSR_copy equ H'23'
min_al_1 equ H'24' ; регістри першого будильника
min10_al_1 equ H'25'
hour_al_1 equ H'26'
hour10_al_1 equ H'27'
min_al_2 equ H'28' ; регістри другого будильника
min10_al_2 equ H'29'
hour_al_2 equ H'2A'
hour10_al_2 equ H'2B'
EEP_Ind_4 equ H'2C' ; регістри для індикації
EEP_Ind_3 equ H'2D' ; режиму роботи з EEPROM
EEP_Ind_2 equ H'2E'
EEP_Ind_1 equ H'2F'
Alarm_count equ H'30' ; лічильник будильника
SB4_count equ H'31' ; лічильник часу натискання на кнопку SB2
IntCount_H equ H'32' ; лічильник переповнення таймеру номер 1
IntCount_L equ H'33' ; лічильник переповнення таймеру номер 2
MaxInt_H equ H'34' ; верхня границя лічильника переривань
MaxInt_L equ H'35' ; визначає секундну затримку
TIME_SET equ H'36' ; коефіцієнт корекції часу
; ------------- Підпрограма яка добавляє хвилини ---------------
INC_MIN macro Reg1_min,Reg2_min
movfw Reg1_min ; якщо кількість менут = 9 то
xorlw 9 ; обнуляємо менути і прибавляємо десятки менут
BZ $+3 ; інакше прибавляємо менути та виходимо з підпрограми
incf Reg1_min, f
goto Main_loop
clrf Reg1_min
movfw Reg2_min
xorlw 5 ; якщо кількість десятків менут = 5,
BZ $+3 ; обнуляємо менути та взагалі та виходимо з підпрограми
incf Reg2_min, f ; інакше прибавляємо десятки менут
goto Main_loop
clrf Reg1_min
clrf Reg2_min
goto Main_loop
endm
; ------------- Підпрограма яка прибавляє години ---------------
INC_HOUR macro Reg1_hour,Reg2_hour
movfw Reg1_hour ; якщо кількість годин = 3, то перевіряємо чи
xorlw 3 ; число десятків годин = 2, якщо так то
btfss STATUS, Z ; обнуляємо години взагалі (перехід із 23 годин в 00)
goto $+5
movfw Reg2_hour
xorlw 2
BZ $+D'14'
movfw Reg1_hour ; якщо число годин = 10, прибавляєм
xorlw 9 ; десятки годин і скидаємо одениці
BZ $+3 ; інакше прибавляєм одениці годин та виходимо із підпрограми
incf Reg1_hour, f
goto Main_loop
clrf Reg1_hour
movfw Reg2_hour
xorlw 2
BZ $+3
incf Reg2_hour, f
goto Main_loop
clrf Reg1_hour
clrf Reg2_hour
goto Main_loop
endm
; ------------- Підпрограма зменшення хвилин ---------------
DEC_MIN macro Reg1_min,Reg2_min
local DEC_min10,Clr
movfw Reg1_min ; зменшуєм хвилини
xorlw 0
BZ DEC_min10
decf Reg1_min,f
goto Main_loop
DEC_min10 movlw 9 ; установлюєм число хвилин = 9
movwf Reg1_min ; і зменшуєм десятки хвилин
movfw Reg2_min
xorlw 0
BZ Clr
decf Reg2_min, f
goto Main_loop
movlw 5
movwf Reg2_min
goto Main_loop
endm
; ------------- Підпрограма зменшення годин ---------------
DEC_HOUR macro Reg1_hour,Reg2_hour
local Set_hour,Clr,If_hour10_1,If_hour10_2,Dec_hour10
movfw Reg1_hour ; зменшуєм години
xorlw 0
BZ Set_hour
decf Reg1_hour, f
goto Main_loop
movfw Reg2_hour ; якщо десятки годин = 0,
xorlw 0 ; установлюємо години рівні 3
btfss STATUS, Z
goto If_hour10_1
movlw 3
movwf Reg1_hour
goto Dec_hour10
If_hour10_1 movfw Reg2_hour ; якщо десятки годин = 1,
xorlw 1 ; установлюєм число годин = 9
btfss STATUS, Z
goto If_hour10_2
movlw 9
movwf Reg1_hour
goto Dec_hour10
If_hour10_2 movlw 9 ; якщо десятки годин = 2,
movwf Reg1_hour ; установлюємо години рівні 9
Dec_hour10 movfw Reg2_hour ; зменшуєм десятки годин
xorlw 0
BZ Clr
decf Reg2_hour, f
goto Main_loop
Clr movlw 2
movwf Reg2_hour
goto Main_loop
endm
; ------------- Підпрограма запису в EEPROM ---------------
EE_write macro Adress,Data
movlw Adress
movwf EEADR
movfw Data
movwf EEDATA
call Write_to_EEPROM
endm
; ------------- Підпрограма читання EEPROM ---------------
EE_read macro Adress,Destination
movlw Adress
movwf EEADR
call Read_from_EEPROM
movfw EEDATA
movwf Destination
endm
; ------------------- ІНІЦІАЛІЗАЦІЯ ----------------------
PROGRAM
bsf STATUS,RP0 ; банк 1
clrf TRISA ; порт А на вихід
movlw B'11110000' ; RB7..RB4 - на вхід, RB3..RB0 - на вихід
movwf TRISB
movlw B'00001000' ; відключений від таймеру
movwf OPTION_REG
bcf STATUS, RP0 ; банк 0
clrf TIME_SET
clrf FLAGS
clrf FLAGS_2
clrf sec
clrf sec10
clrf min
clrf min10
clrf hour
clrf hour10
clrf SB_delay
clrf Bit_counter
clrf Alarm_count
clrf PORTB
clrf SB4_count
clrf IntCount_H
clrf IntCount_L
movlw B'00010001'
movwf PORTA
movlw H'16' ; починаєм індикацію з десятків годин
movwf Ind_start
movfw Ind_start
movwf Fig_pointer
bsf FLAGS,PT ; ввімкнення крапок на індикаторі
bsf FLAGS_2, HL1
movlw D'16' ; запускаємо таймер номер 0
movwf TMR0
EE_read 1, TIME_SET ; читаємо значення коэфіціэнту
movwf TIME_SET ; корекції часу
EE_read 2, min_al_1 ; читаєм показпоказники обох
EE_read 3, min10_al_1 ; будильників з EEPROM
EE_read 4, hour_al_1
EE_read 5, hour10_al_1
EE_read 6, min_al_2
EE_read 7, min10_al_2
EE_read 8, hour_al_2
EE_read 9, hour10_al_2
movfw min_al_1 ; якщо в регістрах будильника
xorlw H'11' ; були числа 0х11, тоді,
btfss STATUS,Z ; він був вімкнений при останньому
bsf FLAGS, Al_on ; записі в EEPROM
movfw min_al_2
xorlw H'11'
btfss STATUS, Z
bsf FLAGS_2, Al_on2
bsf PORTB, 3 ; вмикаєм світлодіод
btfsc FLAGS, Al_on
bcf PORTB, 3
btfsc FLAGS_2, Al_on2
bcf PORTB, 3
bsf INTCON, T0IE ; дозволяєм переривання
bsf INTCON, GIE
movlw H'E' ; ініціалізація регістрів для правельної індикації
movwf EEP_Ind_1 ; режим роботи EEPROM
movlw H'E'
movwf EEP_Ind_2
movfw TIME_SET ; розбиваємо змінну TIME_SET
andlw B'00001111' ; на 16-розрядні десятки та одениці
movwf EEP_Ind_4 ; одениці
movfw TIME_SET
movwf EEP_Ind_3 ; десятки
swapf EEP_Ind_3, f
movlw B'00001111'
andwf EEP_Ind_3, f
;******************************************************************
; ГОЛОВНИЙ ЦИКЛ ПРОГРАМИ
******************************************************************
movlw H'21' ; задаємо верхню границю
movwf MaxInt_L ; лічби переривань = 3873
movlw H'F'
movwf MaxInt_H
movfw TIME_SET ; добавляєм TIME_SET до границі
bcf STATUS, C ; лічби переповнення таймера
addwf MaxInt_L, f
btfsc STATUS, C
incf MaxInt_H, f
movfw IntCount_H ; порівнюєм старший байт
xorwf MaxInt_H, w
btfss STATUS, Z
goto Main_loop
movfw IntCount_L ; порівнюєм молотший байт
xorwf MaxInt_L, w
btfss STATUS, Z
goto Main_loop
goto ADD1s ; секунда пройшла
; ------- Процедура перекодування числа в семисегментний код --------
Table
addwf PCL,f
retlw B'00000010' ; цифра 0
retlw B'10011110' ; цифра 1
retlw B'00100100' ; цифра 2
retlw B'00001100' ; цифра 3
retlw B'10011000' ; цифра 4
retlw B'01001000' ; цифра 5
retlw B'01000000' ; цифра 6
retlw B'00011110' ; цифра 7
retlw B'00000000' ; цифра 8
retlw B'00001000' ; цифра 9
retlw B'11111110' ; пусте місце (код 10h)
retlw B'11111100' ; тире (код 11h)
;********************* Режим індикації секунд ***********************
Show_seconds
clrf SB4_count
btfsc FLAGS,Sec ; якщо на індикаторі показані секунди
goto Show_hour ; повертаємся до нормального вигляду
movlw H'14'
movwf Ind_start
bsf FLAGS, Sec
movwf SB_delay
goto Main_loop
Show_hour
movlw H'16'
movwf Ind_start
bcf FLAGS,Sec
movwf SB_delay
goto Main_loop
;***************** Добавляєм менути реального часу ******************
ADDmin_button
clrf sec
clrf sec10
INC_MIN min, min10
goto Main_loop
;******************Добавляєм години реального часу ******************
ADDh_button
clrf sec
clrf sec10
INC_HOUR hour, hour10
goto Main_loop
END ; кінець програми
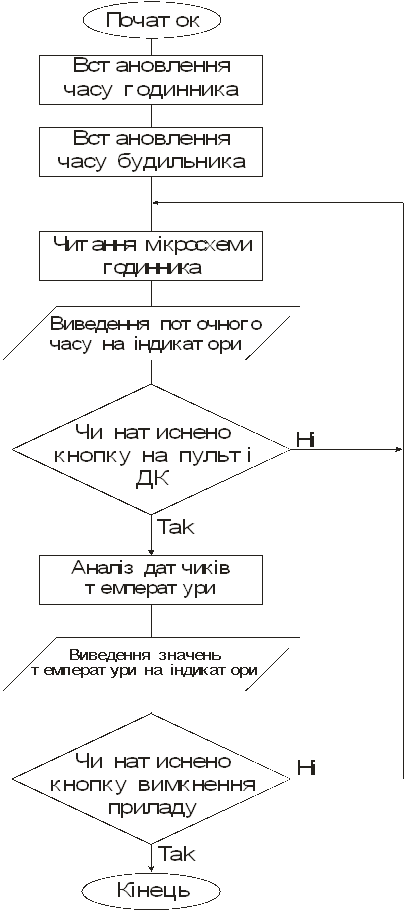
Рисунок 3.2.1 - Блок-схема роботи пристрою
3.3 Розрахунок надійності пристрою
Надійність – властивість пристрою виконувати задані функції в заданих режимах і умовах застосування, обслуговування, ремонту, збереження, транспортування на протязі необхідного інтервалу часу.
Показники надійності:
1. Безвідмовність.
2. Довговічність.
3. Ремонтопридатність.
4. Збереження.
Безвідмовність – властивість безупинно зберігати працездатність до граничного стану, після настання, якого подальша експлуатація виробу економічно недоцільна.
Ремонтопридатність – пристосованість пристрою до попередження відмовлень, до можливості виявлення та усунення несправностей шляхом проведення ремонту і технічного обслуговування.
До термінів ремонтопридатності відносяться: відмовлення, збереження.
Відмовлення – подія, що полягає в повній або частковій утраті працездатності пристрою.
Відмовлення бувають:
Раптові (катастрофічні) – стрибкоподібна зміна параметрів робочого виробу.
Поступові (параметричні) – постійна зміна одного або декількох параметрів з часом, що виходять за припустимі межі.
Збереження – термін, протягом якого при дотриманні режимів збереження виріб зберігає працездатний стан.
Розрахунок надійності поділяється на три розділи:
1. Визначення значення інтенсивності відмовлення всіх елементів за принциповою схемою вузла пристрою.
2. Визначення значення імовірності безвідмовної роботи всієї схеми.
Визначення середнього наробітку до першого відмовлення.
Виконання розрахунків проходить наступним чином:
1. Інтенсивність відмовлення всіх елементів визначається за формулою:
![]() (3.3.1)
(3.3.1)
де:
ni– кількість елементів у схемі;
li– інтенсивність відмовлень і-го елемента;
m – кількість типів елементів.
При розрахунку також потрібно враховувати інтенсивність відмовлень через пайки радіоелементів на друкованій платі.
Інтенсивність відмовлень елементів розраховуємо за формулою:
![]() (3.3.2)
(3.3.2)
де:
lо – інтенсивність відмовлень елементів у режимі номінального навантаження;
Кe – експлуатаційний коефіцієнт;
Кр – коефіцієнт навантаження.
Усі ці параметри беруться з довідника з розрахунку надійності.
2. Ймовірністю безвідмовної роботи називається ймовірність того, що за певних умов експлуатації в заданому інтервалі часу не відбудеться жодного відмовлення.
Ймовірність безвідмовної роботи визначається за формулою:
![]() (3.3.3)
(3.3.3)
де:
![]() - інтенсивність відмов всіх елементів;
- інтенсивність відмов всіх елементів;
t – час, (год).
За результатами розрахунків складається таблиця і графік.
3. Середній наробіток до першого відмовлення – це час роботи пристрою до першої відмови.
Середній наробіток на відмовлення визначається за формулою:
![]() (3.3.4)
(3.3.4)
Розрахунок надійності пристрою приведено далі.
Анотація
Завданням даної курсової роботи є створення схеми електричної принципової годинника-будильника-термометра з ІЧ ПК. В ході виконання курсової роботи розроблено структурну та електричну принципову схему пристрою та програму тестування роботи пристрою, та проведено розрахунок надійності його роботи.
Виконання даної курсової роботи змусило повторити та закріпити вивчений протягом навчального року матеріал з предмету «Мікропроцесорні системи», а також звернутися до додаткової літератури та вивчити багато нового.
Література
1. Бороволоков Э.П. Фролов В.В. «Радиолюбительские схемы» // К.: Кондор – 1995 – 6 с.
2. Якименко Ю.І. Терещенко Т.О. Сокол Є.І. «Мікропроцесорна техніка» // К.: Кондор – 2004 – 24 с.
3. Методичні вказівки щодо виконання курсової роботи.
4. Вершинин О.Е. «Применение микропроцессоров для автоматизации технологических процессов» // Л.: Энергоатомиздат, 1986.
5. Самофалов К.Г., Викторов О.В., Кузняк А.К. «Микропроцессоры» // К.: Техника, 1986.
Похожие работы
... . Варять не більше 20 хв. М'ясний порошок — однорідна маса, отримана подрібненням сухого м'яса, колір світло-коричневий. Варять не більше 5 хв. Волога в порошку не більше 10%, упаковка герметична. ЛЕКЦІЯ ПО ТОВАРОЗНАВСТВУ РИБИ 1.Характеристика сімейств риб Промислові риби класифікують по декількох ознаках. По способу і місцю життя риби ділять на морських, прісноводих, напівпрохідні і прох ...
0 комментариев