Навигация
Основные технические требования, предъявляемые к САР
45493
знака
0
таблиц
9
изображений
4 Основные технические требования, предъявляемые к САР
Применение САР в каждом конкретном случае зависит от того, насколько система удовлетворяет предъявляемым к ней техническим требованиям. Основное требование — сохранение заданной функциональной зависимости между управляющими и регулируемыми переменными на входе и выходе системы. Идеальных систем, которые выполняют это требование абсолютно точно, не существует. Поэтому речь может идти только о степени приближения системы к идеальной. Чем больше эта степень, тем сложнее система. При проектировании САР необходимо стремиться к разумному компромиссу между высоким качеством ее работы и простотой технических средств для достижения этого качества.
Требования, предъявляемые к поведению системы в динамике, зависят от ее назначения, характера и конкретных условий работы и т. д. Различают следующие категории технических требований: устойчивость системы (запасы устойчивости системы); значение ошибки в установившемся состоянии (статическая точность); поведение системы в переходном процессе (условия качества); динамическая точность системы (значение ошибки при непрерывно изменяющихся воздействиях).
Проектируя САР, следует учитывать и такие показатели, как расход энергии на управление, экономическая эффективность системы регулирования, стоимость и окупаемость оборудования, надежность и др.
Наиболее существенным из перечисленных требований является устойчивость системы. САР из-за наличия обратных связей склонны к колебаниям. В устойчиво работающей системе колебания с течением времени затухают, и система приходит в согласованное состояние. Устойчивость системы не должна нарушаться при изменении в определенных пределах внешних и внутренних условий (например, окружающей температуры, напряжения питающей сети и т. д.). Запасы устойчивости должны быть такими, чтобы обеспечивалась возможность изменения параметров системы во время ее работы.
Следует отметить, что принцип обратной связи САР, применяемый для подавления колебаний и уменьшения ошибки, при определенных условиях может привести не только к генерации колебаний и увеличению ошибки, но и к аварийным режимам.
В качестве примера рассмотрим автомат курса, реагирующий на отклонение самолета от требуемого направления. Пусть в начальный момент времени под действием возмущающих сил продольная ось самолета не совпадает с требуемым направлением движения. В результате чувствительный элемент автомата курса вырабатывает сигнал, который заставляет отклониться рули направления. При этом возникает вращающий момент, возвращающий самолет на заданный, курс. Однако в момент, когда продольная ось самолета совпадает с требуемым направлением движения, это возвращение не прекратится, во-первых, потому, что самолет имеет значительный момент инерции и при подходе к заданному курсу будет обладать определенным запасом кинетической энергии; во-вторых, потому что автомат курса, обладающий некоторым запаздыванием, возвратит руль в нейтральное положение лишь через некоторый промежуток времени после того, как продольная ось самолета совпадет с заданным курсом. Поэтому самолет будет отклоняться от заданного курса в направлении, противоположном первоначальному, до тех пор, пока автомат курса не произведет перекладку руля и пока не возникнет вращающий момент, достаточный для возвращения самолета к заданному курсу. Если при этом демпфирование самолета невелико, а инерция и запаздывание автомата курса значительны, то амплитуда колебаний самолета относительно заданного курса возрастет и сохранение заданного курса станет невозможным.
Таким образом, устойчивость является необходимой, но недостаточной характеристикой динамических свойств САР в реальных условиях работы при наличии различных воздействий.
Виды типовых воздействий. Поведение САР существенно зависит от величины и характера воздействий на систему. При рассмотрении конкретных условий работы системы оказывается возможным выбрать такой вид воздействий, который для данной системы был бы наиболее типичным или наиболее неблагоприятным. Изучив переходный процесс, вызванный этим видом воздействий, можно судить о динамических свойствах системы.
Так, при анализе динамики САР в качестве типового (тестового) часто выбирают ступенчатое воздействие, или единичный скачок (рис. 4, а). Примерами такого вида воздействий являются уменьшение (сброс) или увеличение нагрузки в системах регулирования угловой скорости электродвигателя, отказ двигателя в системе двухмоторный самолет — автомат курса, внезапное изменение положения задающей оси в следящих системах и т. д.
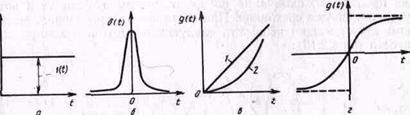
Рис. 4. Виды типовых воздействий
Типовое воздействие может быть в виде d-функции (рис. 4, б), т. е. иметь форму импульса весьма малой продолжительности по сравнению с ожидаемым временем переходного процесса. В реальных условиях такой вид воздействия имеет место, например, в случае внезапного вхождения самолета в струю воздуха, движущегося перпендикулярно траектории движения самолета. При этом d-функцию можно рассматривать как производную от единичной ступенчатой функции.
При исследовании следящих систем типовым управляющим воздействием является, например,
g(t) = g0 + g1t+g2t2+…+grtr, t>0 (1)
Частными случаями такого вида воздействий являются:
 (2)
(2)
 (3)
(3)
Выражения (2) соответствуют изменению управляющего сигнала с постоянной скоростью (кривая 1, рис. 4, в), а выражение (3) – изменению управляющего сигнала с постоянным ускорением (кривая 2, рис. 4, в). Однако, при исследовании следящих систем управления антенной радиолокационной станции используют функцию g(t) = arctg bt, которая отражает собой закон изменения азимутального угла между направлением на цель и некоторым фиксированным направлением в случае прямолинейного и непрерывного движения сопровождаемого объекта (рис. 4, г).
В отдельных случаях типовое воздействие может быть сложной формы, которая определяется экспериментальным путём. Переходные процессы удовлетворяют т.н. первичным показателям качества, когда при единичном ступенчатом воздействии время переходного процесса ![]() , перерегулирование (xmax – x0)/x0 * 100%, статическое отклонение
, перерегулирование (xmax – x0)/x0 * 100%, статическое отклонение ![]() , число колебаний
, число колебаний ![]() за время
за время ![]() . Здесь
. Здесь ![]() - заданные величины, а
- заданные величины, а ![]() - установившееся значение регулируемой величины x(t).
- установившееся значение регулируемой величины x(t).
Переходные процессы. Любое воздействие вызывает в системе процесс, по окончании которого система переходит в новое установившееся состояние. При статическом отклонении, не равном нулю можно выделить следующие типы переходных процессов (рис. 5):
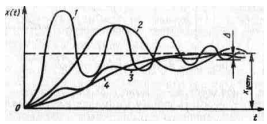
Рис. 5. Основные типы переходных процессов в САР
q колебательные (кривая 1), характеризующиеся наличием двух или большего числа перерегулирований;
q малоколебательные (кривая 2), характеризующиеся наличием только одного перерегулирования;
q без перерегулирования (кривая 3), характеризующиеся тем, что значение отклонения регулируемой величины остаётся в переходном процессе меньше установившегося значения, т. е. выполняется условие ![]() при всех t (с точностью до D);
при всех t (с точностью до D);
q монотонные (кривая 4), характеризующиеся тем, что скорость изменения регулируемой величины не меняет знака в течение переходного процесса, т. е. выполняются условия
![]() ,
,
где ![]() - время переходного процесса.
- время переходного процесса.
В случае воздействий, интенсивность которых неограниченно возрастает с течением времени, отклонение значения регулируемой переменной также неограниченно возрастает. Поэтому будем рассматривать не установившиеся и максимальные значения отклонения, а установившиеся и максимальные ошибки регулируемой переменной от установившегося её значения.
Похожие работы
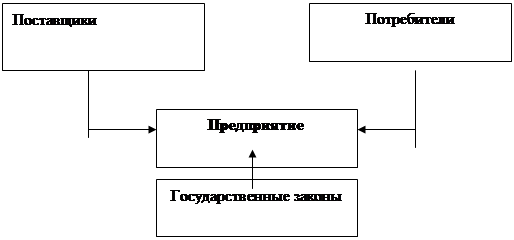
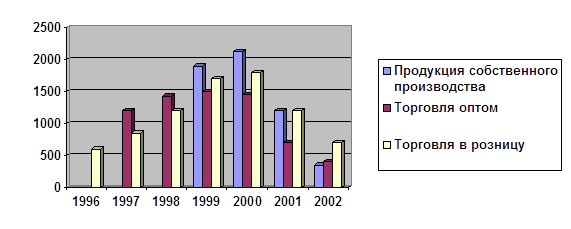
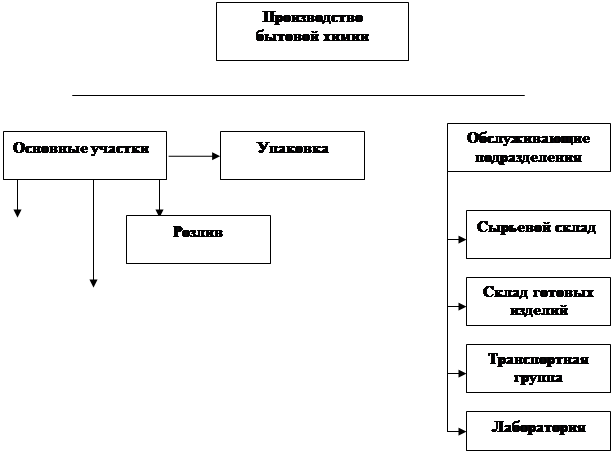
... и отстаивание; разлив; прикручивание пробки; наклеивание этикетки; упаковка и маркировка; хранение и транспортирование. Рис.1 Анализ продаж 2.2. Анализ и совершенствование системы организации и управления 2.2.1. Производственная структура Производственная структура предприятия – состав отделов, служб, их размещение и взаимосвязь, которые обеспечивают рациональное выполнение ...
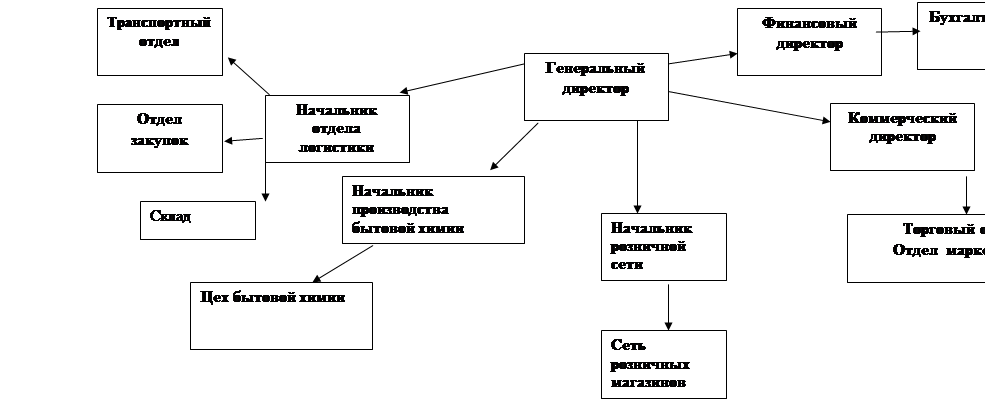
... механизма координации функциональных и межфункциональных связей по достижению изменяющихся целей—с другой. Особенно важное значение при этом имеет разработка не только организационной структуры, но и организационных процессов управления. ГЛАВА 3. ТИПЫ ОРГАНИЗАЦИОННЫХ СТРУКТУР УПРАВЛЕНИЯ И УСЛОВИЯ ИХ ПРИМЕНЕНИЯ. 3.1. ТИПЫ СИСТЕМ УПРАВЛЕНИЯ (механистические и органические). Весьма важной для ...
... , многие считают, что практика опровергает ее. Они указывают на то, что менеджмент в 80-е годы часто отождествлялся с компаниями, в которых доминировала сильная личность. 5. Реализация принципов управления в современном менеджменте Время, в которое мы живем, - эпоха перемен. Наше общество осуществляет исключительно трудную, во многом противоречивую, но исторически неизбежную и необходимую ...

... БИОРЕАКТОРА Лист 90 Доклад. Уважаемые члены государственной экзаменационной комиссии разрешите представить вашему вниманию дипломный проект на тему: «Система автоматизированного управления процесса стерилизации биореактора» Процесс стерилизации биореактора (или ферментера) является важной стадией процесса биосинтеза антибиотика эритромицина. Суть процесса стерилизации состоит в ...
0 комментариев