Навигация
Системы автоматического управления. Цель управления
45493
знака
0
таблиц
9
изображений
5 Системы автоматического управления. Цель управления
Основная проблема ТАР (см. подразд. «Принципы и основы построения систем автоматического регулирования») в векторной форме ставится так: заданы воздействия на входе системы, т. е. уставки, или управляющие воздействия ![]() , зависящие от технологии процесса. Необходимо их наиболее качественное воспроизведение, т. е. сведение к минимуму функционала от ошибки
, зависящие от технологии процесса. Необходимо их наиболее качественное воспроизведение, т. е. сведение к минимуму функционала от ошибки ![]() между векторами входа и выхода САР:
между векторами входа и выхода САР:
![]() (4)
(4)
Система автоматического управления (САУ) представляет собой совокупность объекта управления и управляющей подсистемы (системы), подчиненных общей цели управления. Однако САУ могут состоять из нескольких объектов, объединенных единством цели управления (рис. 6). В качестве таковых можно рассматривать, например, участок производства, цех завода или даже сам завод.
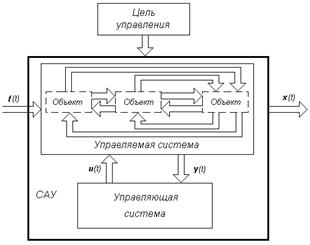
Рис. 6. Общая функциональная схема САУ
Поведение САУ в процессе нормальной эксплуатации определяется целью управления, внешней средой или внешними условиями, а также внутренними свойствами управляемой и управляющей подсистем.
Система управления называется автоматизированной, если основные функции, необходимые в процессе ее работы для достижения цели управления, осуществляются в ней с участием человека-оператора.
Системы автоматического управления функционируют без непосредственного участия человека. Для того чтобы перейти к рассмотрению проблемы ТАУ и ее отличия от проблемы ТАР, дадим математическое описание САУ.
САУ характеризуется следующими основными переменными, которые являются функциями времени:
q переменные состояния ![]() , представляющие собой обобщенные координаты;
, представляющие собой обобщенные координаты;
q управляющие переменные ![]() , формируемые управляющей системой и представляющие собой воздействия на управляемый объект;
, формируемые управляющей системой и представляющие собой воздействия на управляемый объект;
q внешние переменные или возмущающие воздействия ![]() , создаваемые внешней средой и являющиеся, вообще говоря, случайными переменными;
, создаваемые внешней средой и являющиеся, вообще говоря, случайными переменными;
q наблюдаемые переменные ![]() , представляющие собой те из обобщенных координат
, представляющие собой те из обобщенных координат ![]() управляемой системы, информация об изменении которых поступает на управляющую систему.
управляемой системы, информация об изменении которых поступает на управляющую систему.
Переменные ![]() считают выходными переменными системы управления.
считают выходными переменными системы управления.
Будем рассматривать эти переменные как компоненты многомерных векторных функций (см. рис. 7):
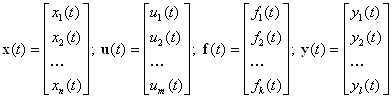
и называть векторы x(t), u(t), f(t), y(t) векторами состояния, управления, возмущения, наблюдения (выхода) соответственно.
В любой момент времени t состояние управляемой системы является функцией начального состояния ![]() и векторов
и векторов ![]() , т.е.
, т.е.
![]() (5)
(5)
Векторное уравнение (5) эквивалентно системе из п скалярных уравнений
![]() (6)
(6)
Уравнения (5) и (6) можно рассматривать как математическую модель управляемой системы в общем случае. Для САУ, описываемых дифференциальными уравнениями, уравнения (5) и (6) можно привести к следующему виду:
![]() (7)
(7)
Уравнение (7) — стохастическое векторное уравнение системы, где f(t) —вектор возмущений и помех, имеющий случайный характер.
Часто на изменение вектора состояния x(t) (или его производных) и вектора управления и u(t) накладываются ограничения вида
![]() (8)
(8)
которые означают, что изменения векторов x(t) и u(t) должны быть ограничены замкнутыми областями А(t) и В (t) векторных пространств состояний и управлений соответственно.
Пусть цель управления как конечный результат функционирования САУ определяется экстремумом некоторого функционала Е, называемого показателем цели управления:
![]() (9)
(9)
Решение задачи управления состоит в том, чтобы найти вектор управления u(t), обеспечивающий экстремум функционала (9)
![]() (10)
(10)
и одновременно удовлетворяющий ограничениям и связям, налагаемым внутренними (собственными) свойствами системы и внешними возмущениями и помехами.
Так как в правую часть уравнения (7) системы (объекта) входят случайные переменные f(t), то и процесс изменения вектора состояния x(t) или вектора выхода y(t) оказывается случайным.
Таким образом, общей задачей теории управления является управление случайным (стохастическим) процессом. Эта задача в общей постановке представляет собой математически почти непреодолимые трудности. Поэтому решение оптимальной задачи управления (10) обычно основывают на методе последовательных приближений, причем первую и вторую итерации определяют поэтапно:
1) этап первичной оптимизации—состоит в нахождении оптимального вектора управления ![]() без учета влияния возмущающих воздействий и помех, характеризуемых вектором f(t). Экстремальная задача решается в упрощенной детерминированной постановке, учитывающей лишь основные свойства системы, т. е. без учета влияния случайных переменных или помех f(t);
без учета влияния возмущающих воздействий и помех, характеризуемых вектором f(t). Экстремальная задача решается в упрощенной детерминированной постановке, учитывающей лишь основные свойства системы, т. е. без учета влияния случайных переменных или помех f(t);
2) этап вторичной оптимизации, или оптимизации качества управления, — состоит в определении минимума функционала (называемого показателем качества САУ)
![]() (11)
(11)
где Ео — экстремум показателя цели управления, вычисленный согласно этапу первичной оптимизации; Едейст — действительный показатель цели управления, учитывающий влияние внешних возмущений и помех.
Из сравнения следует, что функционал (4) является частным случаем общего функционала (11).
Поясним, почему проблема ТАУ более общая и сложная, чем проблема ТАР.
Во-первых, необходимо сформировать управляющее воздействие или вектор u(t) на основании цели управления Е объектом, представляющей собой, в достаточно общем случае, конечный технический или экономический результат, который может быть достигнут САУ на определенном временном интервале ее функционирования. Функционал ![]() , характеризующий цель управления, может представлять собой сложную функцию, которую трудно формализовать (представить в аналитической форме), так как этот функционал зависит, например, от эффективности, производительности, прибыли, стоимости, вероятности выполнения некоторого события и т. д. Кроме того, решение задачи затруднено ввиду значительной неопределенности при описании модели объекта, требуемых ограничений, случайного характера приложенных к нему возмущений и помех и т. д. Очевидно, что цель управления гораздо сложнее, чем цель регулирования, которая состоит лишь в нахождении минимума функционала от ошибки между входом и выходом согласно (4).
, характеризующий цель управления, может представлять собой сложную функцию, которую трудно формализовать (представить в аналитической форме), так как этот функционал зависит, например, от эффективности, производительности, прибыли, стоимости, вероятности выполнения некоторого события и т. д. Кроме того, решение задачи затруднено ввиду значительной неопределенности при описании модели объекта, требуемых ограничений, случайного характера приложенных к нему возмущений и помех и т. д. Очевидно, что цель управления гораздо сложнее, чем цель регулирования, которая состоит лишь в нахождении минимума функционала от ошибки между входом и выходом согласно (4).
Во-вторых, сложность проблемы управления состоит в аналитическом решении задачи определения оптимального значения ![]() , придающего экстремум функционалу цели управления Ео. Кроме того, необходимо усилить управляющий сигнал до уровня, достаточного для воздействия на объект управления т. е. решить собственно задачу регулирования, так как технически управляющий сигнал обычно формируется при помощи ЭВМ на низком уровне мощности.
, придающего экстремум функционалу цели управления Ео. Кроме того, необходимо усилить управляющий сигнал до уровня, достаточного для воздействия на объект управления т. е. решить собственно задачу регулирования, так как технически управляющий сигнал обычно формируется при помощи ЭВМ на низком уровне мощности.
Таким образом, необходимо сформировать показатель качества управления в виде функционала (11)
![]() (12)
(12)
и решить эту задачу уже в стохастической постановке.
Один из вариантов решения проблемы управления приведен рис. 7, где ![]() —случайные воздействия.
—случайные воздействия.
Итак, поставлена проблема, которая сводится к решению задачи двух зависимых друг от друга функционалов (11) и (12), между тем как в математике не существует регулярных средств для решения задач такого рода.
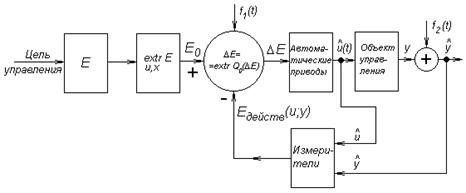
Рис. 7. Вариант построения САУ
Похожие работы
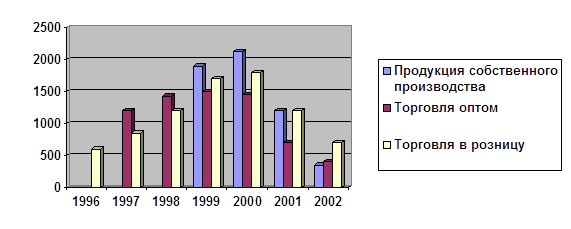
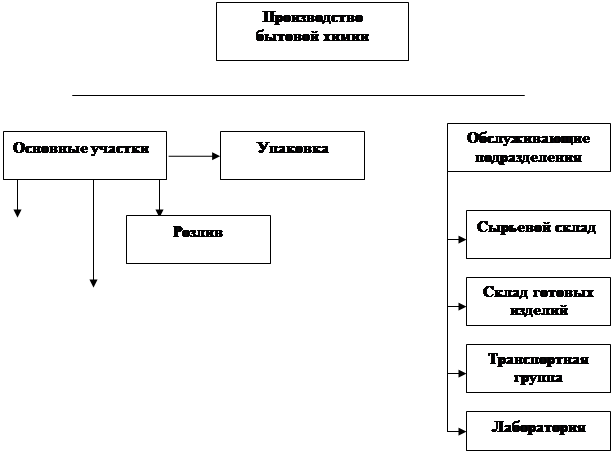
... и отстаивание; разлив; прикручивание пробки; наклеивание этикетки; упаковка и маркировка; хранение и транспортирование. Рис.1 Анализ продаж 2.2. Анализ и совершенствование системы организации и управления 2.2.1. Производственная структура Производственная структура предприятия – состав отделов, служб, их размещение и взаимосвязь, которые обеспечивают рациональное выполнение ...
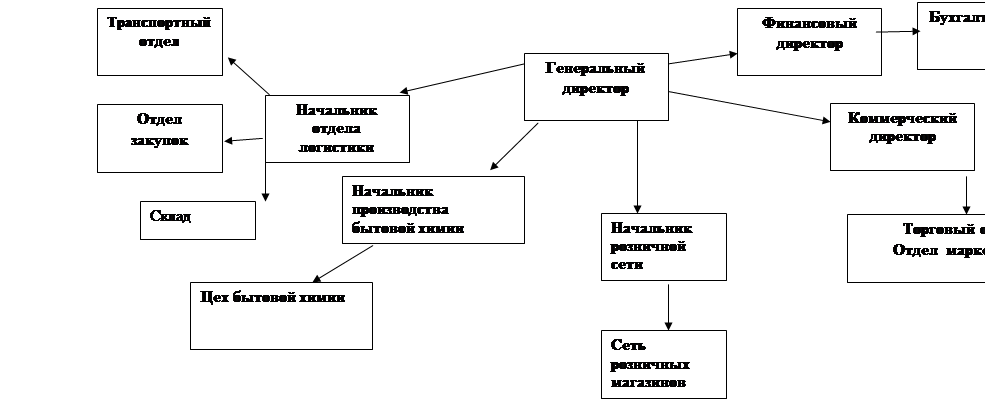
... механизма координации функциональных и межфункциональных связей по достижению изменяющихся целей—с другой. Особенно важное значение при этом имеет разработка не только организационной структуры, но и организационных процессов управления. ГЛАВА 3. ТИПЫ ОРГАНИЗАЦИОННЫХ СТРУКТУР УПРАВЛЕНИЯ И УСЛОВИЯ ИХ ПРИМЕНЕНИЯ. 3.1. ТИПЫ СИСТЕМ УПРАВЛЕНИЯ (механистические и органические). Весьма важной для ...
... , многие считают, что практика опровергает ее. Они указывают на то, что менеджмент в 80-е годы часто отождествлялся с компаниями, в которых доминировала сильная личность. 5. Реализация принципов управления в современном менеджменте Время, в которое мы живем, - эпоха перемен. Наше общество осуществляет исключительно трудную, во многом противоречивую, но исторически неизбежную и необходимую ...

... БИОРЕАКТОРА Лист 90 Доклад. Уважаемые члены государственной экзаменационной комиссии разрешите представить вашему вниманию дипломный проект на тему: «Система автоматизированного управления процесса стерилизации биореактора» Процесс стерилизации биореактора (или ферментера) является важной стадией процесса биосинтеза антибиотика эритромицина. Суть процесса стерилизации состоит в ...
0 комментариев