Навигация
УУ может находиться в одном из состояний множества
14035
знаков
1
таблица
2
изображения
3. УУ может находиться в одном из состояний множества
Q={Q1,Q2,…,QL}
4. Множество выполняемых операций y1…ys
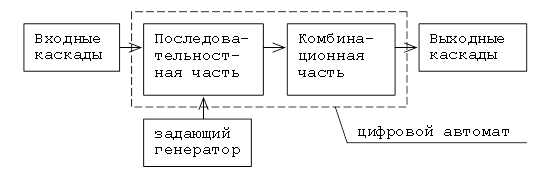
УУ можно представить некоторым конечным автоматом, соответствующим логике автомата Мура или автомата Мили.
Переход в новое состояние для автомата Мура определяется некоей функцией А от текущего состояний, выполняемой операции и значения.
Q(t+1)=A(Q(t),yi,u1…un)
вых. сигналы:
V1=F1(Q(t),yi), V2=F2(Q(t),yi), …Vm=Fm(Q(t),yi)
Т.о. значения управляющих сигналов при построении УУ как автомата Мура, зависят только от состояния УУ.
При построении УУ как автомата Мили, выработка управляющих сигналов зависит также от значений «осведомительных сигналов»
V1=f1(Q(t),yi,u1…un), V2=f2(Q(t),yi,u1…un), …Vm=fm(Q(t),yi,u1…un)
Построение автомата Мура требует большего использования компонент для отражения состояния автомата (памяти).
Построение автомата Мили снижает количество элементов памяти для отражения его состояния и требует больше сложных преобразований всех входящих аргументов, поэтому применяют оба подхода.
Каждая микрооперация имеет определенную длительность.
Для использования min количества тактовых импульсов синхросигнала все микрооперации «выравнивают» по самой долгой. Любая микрооперация может быть инициирована только на границе тактов.
Т.о. последовательность микроопераций реализуется последовательностью управляющих сигналов, подаваемых в начале каждого такта сигналов синхронизации.
Не смотря на то, что идея МПУУ была известна с 1951г. как подход к построению УУ с упорядочением формирования управляющих сигналов.
УУ состоит из памяти (матрица С), содержащей 2S различных микрокоманд, где S – код, адрес соотв-щей микрокоманды.
Если по каким-либо правилам задать адрес первой микрокоманды, выполняющей заданную операцию и разместить её в РгАдреса МикроКоманды, а затем подать на дешифратор с сигналами синхронизации, то на выходе ДШ будет активизирована одна выходная горизонтальная линия, соответствующая выполняемой микрооперации.
В таком случае на вертикальных шинах матрицы С, которые связаны с соответствующей горизонтальной линией, появятся сигналы управления.
Матрица С связана с Т, которая аналогичным образом позволяет формировать адрес следующей микрокоманды.
Использование специального триггера условий позволяет учесть значения «осведомительных сигналов» и выполнить разветвление в микропрограмме путём перехода к другой горизонтальной линии, которая задаёт другой адрес следующей микрокоманды.
Задержка сигналов нужна, чтобы формировать новые управляющие сигналы после выполнения текущей микрокоманды.
Последовательность микрокоманд должна получить естественное завершение. Практическая реализация МПУУ связана с использованием различных форматов микрокоманд и различных модулей МП-памяти.
МП-управление с одной стороны позволяет адаптировать систему команд к потребностям выполнения алгоритмов программ. С другой стороны позволяет упростить и автоматизировать процессы проектирования УУ и микропроцессоров в целом.
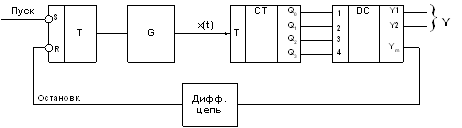
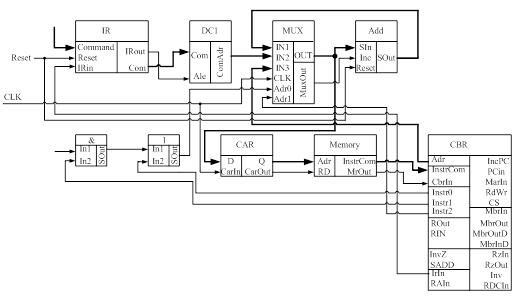
Состав: УФАМК – устройство формирования адреса микрокоманды; РгАМК – регистр адреса микрокоманды; ПМК – память микрокоманды; РгМК – регистр микрокоманды; ДШМК – дешифратор микрокоманд (дешифратор микрооперации); КОП - код операции.
Начальный источник операции – регистр команд, из которого используется код операции микрокоманды. На основании этого кода УФАМК формирует первой микрокоманды в составе МП-программы, обеспечивающей выполнение данной команды.
Один из вариантов формата микрокоманды следующий: код МО из РгМК попадает в ДшМК, который используется для образования управляющих сигналов.
| код МО | адрес след. МК |
Управляющие сигналы идут на операционное устройство и совместно с сигналами синхронизации обеспечивают (синхронизируют) выполнение одной или нескольких микроопераций в составе операционного устройства (АЛУ).
Адресная часть микрокоманды идет в УФАМК для выбора следующей микрокоманды.
На выбор следующей микрокоманды влияют результаты выполнения предыдущей микрооперации, поступающей из операционного блока. Процесс идет до выполнения всех операций в составе команды.
Для кодирования микрокоманд используется несколько форматов:
1. Горизонтальное кодирование: поле команды, соответствующее коду микрооперации представлялось в виде
V1|V2|…|Vn|Адрес.
2. Каждый разряд поля соответствует одному функциональному сигналу УУ, соответствующему некоторой микрооперации операционного устройства. Если в этом поле - «1» то это значит, что соответствующая микрооперация будет инициализирована независимо от содержания других рядов этого поля. В таком случае каждой микрокоманде единичные разряды поля микрооперации обеспечивают выполнение соответствующих функций операционного устройства.
Недостаток - длина микрокоманды, учитывая, что количество микроопераций может составлять несколько сот. С другой стороны, учитывая, что многие микрокоманды несовместимы, соответствующее поле микрокоманды будет состоять практически из нулей.
3. Вертикальное кодирование. В поле микрооперации находится код микрооперации, который для дальнейшего использования требует дешифратора. Недостаток – «длинный» микропрограммы, т.к. в каждом такте сигналов синхронизации может быть активизирована только одна микрооперация.
4. На практике распространено смешанное кодирование в 2-х вариантах: вертикально-горизонтальное и горизонтально-вертикальное.
Ветртикално-горизонтальное: всё множество операций V разбивается на k подмножеств Vi. Каждое подмножество размещается в составе поля микрооперации, занимая фиксированный размер в составе поля.
Такие микрокоманды называют микрокоманды с полевой структурой. Каждое такое выделенной поле управляет некоторым подмножеством микроопераций, задавая код данной микрооперации. В результате требуется k дешифраторов.
Данный подход позволяет объединять в одном такте выполнение k микроопераций.
Горизонтально-вертикальное содержит поле микрооперации из двух частей:
V1|V2|…|Vk| l
Первая область содержит некоторые управляющие сигналы, содержание и значение которых зависит от кода во второй области.
Если нужно совместить в одном такте сигналов синхронизации принципиально несовместимые микрооперации, то используют т.н. многофазные микрокоманды, в которых период сигналов синхронизации делится на фазы, в течении которых выполняются определённые компоненты микрокоманды.
Все форматы микрокоманд обеспечивают одни цели: увеличение производительности, уменьшение времени выполнения, уменьшение требуемых объемов памяти для хранения микрокоманд.
Если микропроцессор предназначен для выполнения строго очерченного множества операций с максимально высокой производительностью, то УУ строится как автомат с жесткой логикой.
Похожие работы


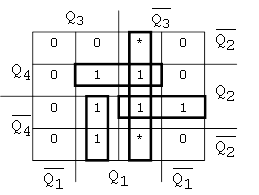
... состояний триггеров. Рис.3.5. Карта Карно, описывающая зависимость состояния входа D4 от состояний триггеров. Рис.3.6. Схема последовательностной части цифрового управляющего устройства Рис.3.7. 3.1.4 Синтез комбинационной части цифрового управляющего устройства 3.1.4.1Определение зависимости выходных сигналов цифрового управляющего устройства от входных сигналов и внутренних ...
... входов для каждого триггера: МДНФ счётчика: ; ; ; . · Синтезируем счётчик. Структурную схему: Принципиальную схему: Временные диаграммы счётчика: Синтез дешифратора Мы должны получить неполный ...
... в 60-х годах разрабатывались новые модели машин серии М для управляющих применений в различных отраслях народного хозяйства. В 70-х ИНЭУМ стал головной организацией по созданию серии малых управляющих ЭВМ — СМ ЭВМ. И.С. Брук был человеком выдающимся и весьма своеобразным. По стилю своей деятельности это был, скорее, ученый-одиночка, генератор идей, которые подхватывали и реализовывали его ...
... начинается фаза интерпретации команды. В зависимости от команды эта фаза может представлять собой, например, извлечение из памяти константы, необходимой для выполнения команды или извлечение из памяти номера регистра. В конце этой фазы процессор готов к выполнению команды. На этом начинается фаза выполнения. Фаза извлечения данных из памяти присутствует у команды занесения данных в аккумулятор, в ...
0 комментариев