Навигация
Характеристики систем автоматического управления
11849
знаков
3
таблицы
14
изображений
Теория автоматического управления
Тема:
"Характеристики систем автоматического управления"
1. Статические характеристики САУ
Статические характеристики определяют статику системы, т.е. ее поведение в установившемся режиме.
Статической характеристикой называется отношение выходной величины к входной величине в установившемся режиме.
Статические характеристики позволяют: определить коэффициент усиления системы; степень ее нелинейности; величину статизма; произвести согласование рабочих точек системы.
2. Динамические характеристики САУ
Динамические характеристики определяют динамику системы, т.е. ее поведение в неустановившемся (переходном) режиме. При этом используют следующие основные динамические характеристики:
– передаточная функция;
– временные характеристики;
– частотные характеристики.
2.1 Передаточная функция системы и ее свойства
Дифференциальное уравнение линейной системы имеет вид:
 (1)
(1)
где аi и bi – параметры системы, n-порядок системы.
Если применим теоремы Лапласа при нулевых начальных условиях, то дифференциальное уравнение в операторной форме запишется следующим образом
![]()
где ![]()
Физически нулевые начальные условия обозначают, что до приложения воздействия система находилась в покое.
Передаточная функция системы есть отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях
 (2)
(2)
Основные свойства передаточной функции:
1. Передаточная функция является полной характеристикой системы.
Она полностью характеризует статические и динамические свойства системы.
2. Статический коэффициент усиления, т.е. коэффициент усиления в установившемся режиме (при t®¥ или p®0) равен
 .
.
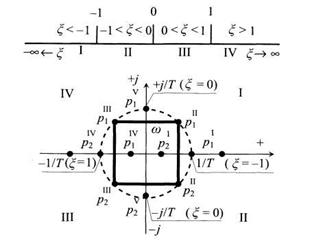
3. Полином знаменателя называется характеристическим, а A(p) = 0 называется характеристическим уравнением. Корни полинома знаменателя называются полюсами, а числителя нулями.
Степень полинома числителя не превышает степени полинома знаменателя (n³m), в противном случае система является физически нереализуемой.
5. Коэффициенты полиномов aiи biобусловлены реальными физическими параметрами системы.
6. Передаточная функция может быть задана в виде нулей и полюсов в графическом виде.
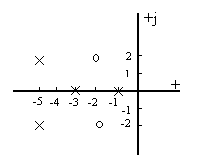
Рис. 1
Например, для приведенного на рис. 1 расположения нулей (0) и полюсов (х) передаточная функция имеет вид:
 .
.
2.2 Временные характеристики САУ
Временной характеристикой системы называется закон изменения выходной величины в функции времени при изменении входного воздействия по определенному закону и при условии, что до приложения воздействия система находилась в покое. Временные характеристики определяются как реакция системы на типовые воздействия при нулевых начальных условиях.
К основным временным характеристикам относятся переходная функция и функция веса.
Типовые воздействия. В качестве типовых воздействий при исследовании систем используются:
– единичная функция;
– единичный импульс;
– линейно – растущее воздействие;
– квадратичное воздействие;
– гармоническое воздействие;
– «белый шум» (используется при исследовании стохастических систем).
Единичная функция. Единичная функция – воздействие, амплитуда которого равна 0 при t < 0 и равна 1 при t ³ 0.
Свойства единичной функции и единичной функции со сдвигом определяются соотношениями:
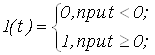 или
или  (3)
(3)
а их графическое изображение имеет вид, приведенный на рис. 2а, б.
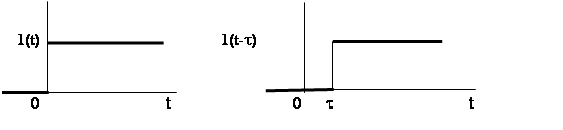
а) б)
Рис. 2
При этом изображение единичного воздействия имеет вид:
 (4)
(4)
Единичный импульс. Единичный импульс (d – функция) – это идеализированный сигнал, который характеризуется бесконечно малой длительностью, бесконечно большим уровнем (амплитудой) и площадью равной единице.
Единичный импульс и импульс со сдвигом описываются соотношениями:
 или
или  (5)
(5)
а их графическое изображение имеет вид, приведенный на рис. 3а, б.
а) б)
Рис. 3
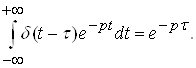
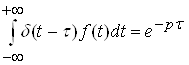
При этом изображение единичного импульса имеет вид
![]() (6)
(6)
Основные свойства дельта – функции
1. – площадь или интенсивность d – функции;
– площадь или интенсивность d – функции;
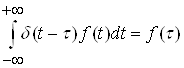
2. ![]() -фильтрующее свойство;
-фильтрующее свойство;
3.  ;
;
![]() - связь d – функции с единичной функцией;
- связь d – функции с единичной функцией;
5. 
 .
.
Свойства дельта – функции широко используются в методах исследования САУ.
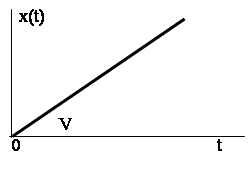
Линейно-растущее воздействие. Линейно-растущее воздействие – это воздействие с постоянной скоростью изменения сигнала. Такое воздействие чаще всего используется для определения точности систем и описывается соотношением:
![]() . (7)
. (7)
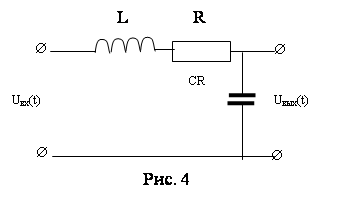
Графическое изображение линейно – растущего воздействия имеет вид, приведенный на рис. 4а.
При этом,
 . (8)
. (8)
 | |||
 | |||
а) б)
Рис. 4
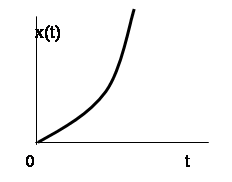
Квадратичное воздействие. Квадратичное воздействие – это воздей-ствие с постоянным ускорением изменения сигнала. Такое воздействие чаще всего используется для определения точности систем и описывается соотношением:
 . (9)
. (9)
Графическое изображение квадратичного воздействия имеет вид, приведенный на рис. 5.
При этом, . (10)
. (10)
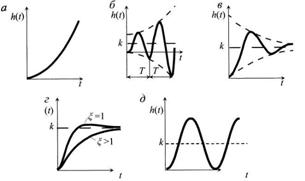
Переходная функция. Переходная функция h(t) – реакция системы на единичное воздействие при нулевых начальных условиях.
Пусть задана система (рис. 5) с передаточной функцией K(p)
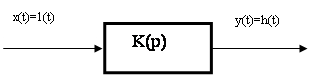
Рис. 5
В изображениях выходная величина равна ![]() .
.
Так как  , то изображение выходной величины равно
, то изображение выходной величины равно
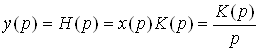 .
.
При этом связь между передаточной и переходной функцией имеет вид:
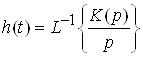 . (11)
. (11)
Начальное значение переходной функции равно нулю, а установившееся значение определяется с помощью теоремы о конечном значении функции
![]() . (12)
. (12)
Весовая функция. Весовая функция k(t) – реакция системы на единичный импульс при нулевых начальных условиях.
Пусть задана система (рис. 6) с передаточной функцией K(p)
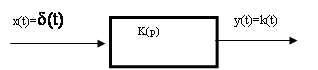
Рис. 6
В изображениях выходная величина равна ![]() , а в оригиналах определяется с помощью интеграла свертки
, а в оригиналах определяется с помощью интеграла свертки
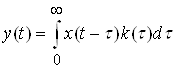 . (13)
. (13)
Так как ![]() , то
, то ![]() .
.
При этом связь между передаточной и весовой функцией имеет вид:
![]() , (14)
, (14)
т.е. весовая функция представляет оригинал передаточной функции.
Установившееся значение весовой функции определяется с помощью теоремы о конечном значении функции
![]() . (15)
. (15)
Связь между переходной и весовой функцией имеет вид:
![]() . (16)
. (16)
Методы определения временных характеристик
Существуют различные методы расчета переходных процессов, при этом наиболее часто используются следующие методы:
1. Классический метод.
2. Операторный метод, использующий разложение на простые дроби.
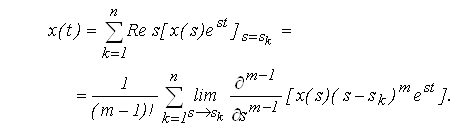
3. Операторный метод, использующий вычеты.
Метод аналогового и цифрового моделирования.
5. Метод трапеций.
Рассмотрим некоторые методы определения временных характеристик на конкретных примерах.
Классический метод расчета временных характеристик
Классический метод расчета временных характеристик основан на решении дифференциальных уравнений.
Пример 1. Пусть дана передаточная функция: ![]()

Определить: переходную функцию – h(t) и функцию веса – k(t).
Решение
1. Запишем дифференциальное уравнение в соответствии с заданной передаточной функцией
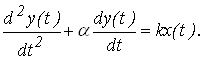
При единичном воздействии, т.е. x(t)=1(t) дифференциальное уравнение имеет вид
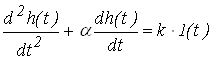 .
.
Похожие работы



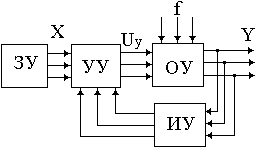
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... значениях функции. Начальное значение функции:. (2.10) Конечное значение функции: . (2.11) 7. Теорема запаздывания . (2.12) 4. Дифференциальные уравнения САУ При математическом описании систем автоматического управления составляют уравнения статики и динамики. Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими. Уравнения динамики ...
... записи в Zam_ck=inv(l+sysl)*sysl можно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck. 2.Исследование линейной импульсной системы автоматического управления Задание: 1) Найти передаточные функции импульсной САУ: W*(z) разомкнутой системы, Ф*(z) – замкнутой системы, Фе*(z) – системы по ошибке. Параметры Т, Т1, τ1, К0, ...
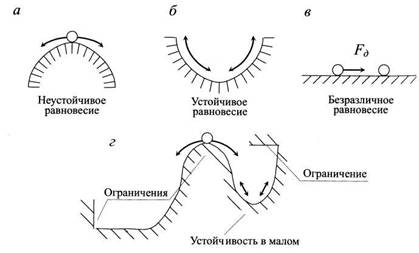
... можно судить, если в пространстве изменяемых параметров построить область устойчивости, т.е. выделить область значений параметров, при которых система сохраняет устойчивость. Область устойчивости в теории автоматического управления принято называть D – областью, а представление области параметров в виде областей устойчивости и неустойчивости называют D – разбиением. Построение области ...
0 комментариев