Навигация
Общее решение неоднородного дифференциального уравнения состоит из свободной и вынужденной составляющей
11849
знаков
3
таблицы
14
изображений
2. Общее решение неоднородного дифференциального уравнения состоит из свободной и вынужденной составляющей
![]() .
.
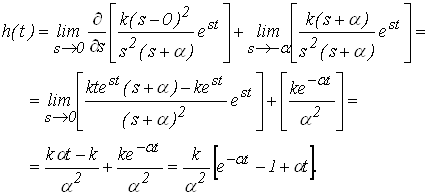
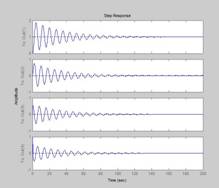
3. Переходная функция может быть определена из соотношения
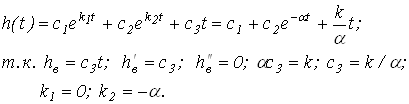
При нулевых начальных условиях
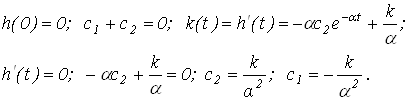
При этом выражения для переходной функции и функции веса имеют вид:

Метод разложение на простые дроби
Рассмотрим алгоритм использования метода на предыдущем примере. Определим функцию веса для заданной системы.
Исходную передаточную функцию можно представить в виде:

![]() Значения параметров А и В находим методом неопределенных коэффициентов
Значения параметров А и В находим методом неопределенных коэффициентов
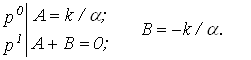
Функция веса равна: ![]()
Определим переходную функцию.
Изображение переходной функции можно представить в виде:
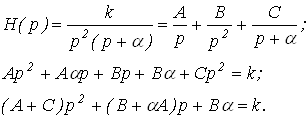
Значения параметров А, В и С находим методом неопределенных коэффициентов.
Переходная функция равна: 
Определение временных характеристик с использованием вычетов
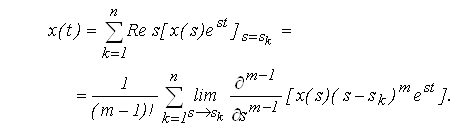
Рассмотрим алгоритм использования метода на предыдущем примере. Определим функцию веса для заданной выше системы. В соответствии с теоремой разложения:
если
 где
где  ,
,
то
 .
.
Таким образом, используя теорему Коши о вычетах, оригинал можно определить как сумму вычетов по полюсам подынтегральной функции.
Рассмотрим изображение переходной функции:
Запишем характеристическое уравнение, определим значения полюсов их количество и кратность
![]()
При этом переходную функцию определяем, используя вычеты по полюсам подынтегральной функции
Функция веса определяем аналогично, либо через производную от переходной функции
![]()
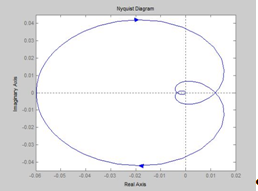
2.3 Частотные характеристики САУ
Частотные характеристики определяются, как реакция системы на гармоническое типовое воздействие при нулевых начальных условиях.
Пусть задана система (рис. 7) с передаточной функцией K(p).
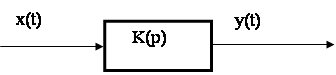
Рис. 7
При подаче на вход системы гармонического воздействия
![]() , (17)
, (17)
на выходе получим ![]() (18)
(18)
Если использовать формулы Эйлера, эти соотношения можно представить в комплексном виде:
![]() (19)
(19)
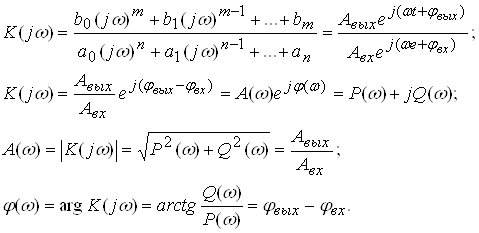
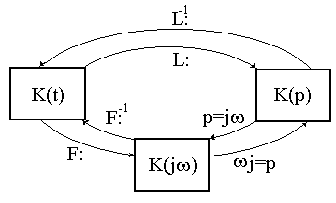
Если выполнить подстановку p = jw в передаточной функции системы, то получим комплексную передаточную функцию
 (20)
(20)
![]() АФХ – амплитудно-фазовая частотная характеристика;
АФХ – амплитудно-фазовая частотная характеристика;
![]() ВЧХ – вещественная частотная характеристика;
ВЧХ – вещественная частотная характеристика;
![]() МЧХ – мнимая частотная характеристика;
МЧХ – мнимая частотная характеристика;
![]() АЧХ – амплитудно-частотная характеристика;
АЧХ – амплитудно-частотная характеристика;
![]() ФЧХ – фазовая частотная характеристика.
ФЧХ – фазовая частотная характеристика.
Частотные характеристики могут быть выражены через коэффициенты полиномов передаточной функции
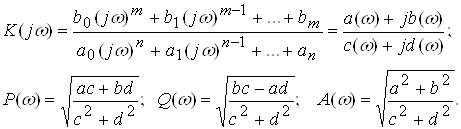 (21)
(21)
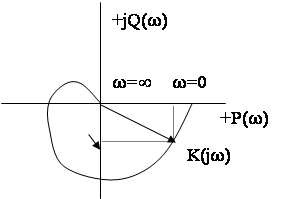
Графически характеристики можно представить в виде рис. 8а.
Связь между временными и частотными характеристиками.Рассмотрим связь между частотными характеристиками и переходной функцией системы (рис. 8б).
 | |||
 | |||
а) б)
Рис. 8
Для выходной величины можно записать .
. Используя преобразование Фурье, получим выражение для переходной функции
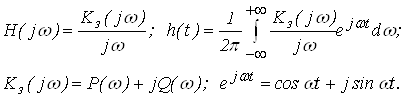 (22)
(22)
Подставив эти выражения в формулу для h(t) и выполнив преобразования, получим связь между переходной функцией и ВЧХ:
 (23)
(23)
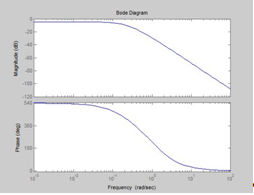
Логарифмические частотные характеристики САУ
Исследование систем существенно упрощается при использовании не обычных, а логарифмических частотных характеристик. При этом натуральная логарифмическая амплитудная и фазовая частотные характеристики определяются из соотношений
![]() . (24)
. (24)
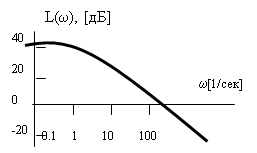
На практике обычно используют десятичные логарифмы. При этом логарифмическая амплитудно-частотная характеристика (ЛАЧХ) строится в логарифмическом масштабе частот и определяется соотношением
![]() .
.
Единицей измерения ЛАЧХ является децибел (дБ), 1дБ = 1/10 [Бел].
Так как 1 Бел соответствует увеличению мощности в 10 раз, то
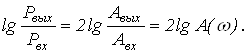 (25)
(25)
Амплитуда сигнала откладывается по оси ординат (рис. 9а), при этом ось абсцисс соответствует значению амплитуды равной единице, верхняя полуплоскость соответствует усилению сигнала (A > 1), а нижняя – ослаблению (A < 1).
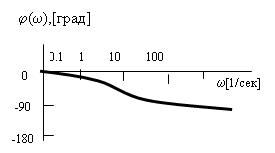
Логарифмическая фазовая частотная характеристика (ЛФЧХ) строится в логарифмическом масштабе частот, при этом частоты откладываются по оси абсцисс по декадам (рис. 9б). Декада – отрезок, на котором частота увеличивается в десять раз.
 | |||
 | |||
а) б)
Рис. 9Начало оси координат, в зависимости от диапазона частот, на котором строится логарифмическая характеристика, может быть помещено в любую точку (w = 0,01; w = 0,1; w = 1 и т.д.).
Логарифмические характеристики имеют ряд преимуществ перед обычными частотными характеристиками. Основным преимуществом логарифмических характеристик является возможность оценки влияния отдельных параметров системы без необходимости повторного проведения расчета.
Литература
1. Автоматизированное проектирование систем автоматического управления. / Под ред. В.В. Солодовникова. – М.: Машиностроение, 1990. -332 с.
2. Бойко Н.П., Стеклов В.К. Системы автоматического управления на базе микро-ЭВМ. – К.: Тэхника, 1989. –182 с.
3. В.А. Бесекерский, Е.П. Попов «Теория систем автоматического управления». Профессия, 2003 г. – 752 с.
4. Воронов А.А., Основы теории автоматического управления, ч. 3, М. – Л., 1970.
5. Гринченко А.Г. Теория автоматического управления: Учебн. пособие. – Харьков: ХГПУ, 2000. –272 с.
6. Емельянов С.В., Системы автоматического управления с переменной структурой, М., 1967.
7. Макаров И.М., Менский Б.М. Линейные автоматические системы. - М.: Машиностроение, 1982.
8. Справочник по теории автоматического управления. / Под ред. А.А. Красовского – М.: Наука, 1987. – 712 с.
Похожие работы



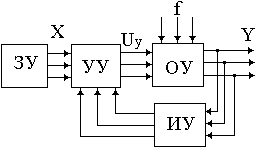
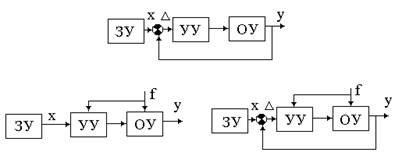
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... значениях функции. Начальное значение функции:. (2.10) Конечное значение функции: . (2.11) 7. Теорема запаздывания . (2.12) 4. Дифференциальные уравнения САУ При математическом описании систем автоматического управления составляют уравнения статики и динамики. Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими. Уравнения динамики ...
... записи в Zam_ck=inv(l+sysl)*sysl можно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck. 2.Исследование линейной импульсной системы автоматического управления Задание: 1) Найти передаточные функции импульсной САУ: W*(z) разомкнутой системы, Ф*(z) – замкнутой системы, Фе*(z) – системы по ошибке. Параметры Т, Т1, τ1, К0, ...
... можно судить, если в пространстве изменяемых параметров построить область устойчивости, т.е. выделить область значений параметров, при которых система сохраняет устойчивость. Область устойчивости в теории автоматического управления принято называть D – областью, а представление области параметров в виде областей устойчивости и неустойчивости называют D – разбиением. Построение области ...
0 комментариев