МНОГОКОНТУРНЫЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ
Многие объекты химической технологии обладают существенным запаздыванием и характеризуются значительными возмущениями. Использование одноконтурных систем при автоматизации таких объектов не позволяет обеспечить высокого качества регулирования. Поэтому для повышения качества регулирования этих объектов используют более сложные АСР.
Каскадные АСР
В каскадных системах при регулировании основной технологической величины в объекте с большим запаздыванием используются также вспомогательные величины, реагирующие на изменение основных возмущений объекта и регулирующего воздействия с меньшим запаздыванием. В таких случаях стабилизация вспомогательных величин способствует более качественному регулированию основной величины. Каскадная система состоит из нескольких контуров регулирования, каждый из которых регулирует свою технологическую (основную или вспомогательную) величину. Однако применение каскадных схем эффективно только в том случае, когда запаздывание в контуре регулирования основной величины существенно больше, чем в контуре регулирования вспомогательной величины. При автоматизации химико-технологических объектов чаще всего используют двухконтурные каскадные системы.
Структурная схема двухконтурной системы приведена на рис. VI - 7. В объекте регулирования ОР на основную у и вспомогательную у1 технологические величины воздействуют регулирующая величина х и основное (наиболее сильное и быстро изменяющееся) возмущение z1. На величину у действует также небольшое и редкое возмущение z. Двухконтурная каскадная система имеет вспомогательный (стабилизирующий) контур регулирования и основной (корректирующий) контур. В стабилизирующий контур входит объект ОР (канал х → у1) и стабилизирующий регулятор AP1, вырабатывающий регулирующее воздействие х. Корректирующий контур регулирования состоит из объекта (канал х → у) и корректирующего регулятора АР с независимым заданием u. На вход регулятора АР поступает основная регулируемая величина у, а на вход регулятора AP1 - вспомогательная величина у1. Выходная величина х1 регулятора АР направляется на регулятор AP1 для изменения его задания. Стабилизирующий контур предназначен для регулирования вспомогательной величины у1, а корректирующий - основной величины у.
Обычно применяют следующие типы каскадных АСР: П - ПИ, ПИ - ПИ, ПИ - ПИД (первый регулятор является стабилизирующим, а второй - корректирующим).
Возмущение z1 приводит к изменению сначала вспомогательной величины y1, а затем — основной величины у. Поэтому стабилизирующий контур регулирования быстрее, чем корректирующий, вступит в работу и выработает регулирующее воздейстствие, которое частично скомпенсирует отклонение величины у от заданного значения u. Нескомпенсированное отклонение величины у приведет в действие корректирующий контур регулирования, который постепенно скомпенсирует это отклонение. Влияние возмущения z на величину у подавляется корректирующим контуром регулирования. При этом стабилизирующий контур регулирования является быстродействующим, а корректирующий — медленнодействующим. Таким образом, применение стабилизирующего контура регулирования приводит к значительному повышению качества регулирования основной технологической величины.
Для иллюстрации этого положения на рис. VI-8 приведены сравнительные графики переходных процессов в каскадной системе, с П — ПИ - регуляторами (кривая 1) и одноконтурной системе с ПИ - регулятором (кривая 2), полученные при нанесении одинакового возмущения z1 на один и тот же объект. В одном и другом случаях переходные процессы носят колебательный характер и не имеют статической ошибки регулирования. В то же время при использовании каскадной системы динамическая ошибка и время регулирования имеют меньшие значения. Уменьшается в несколько раз и интегральная квадратичная ошибка регулирования.
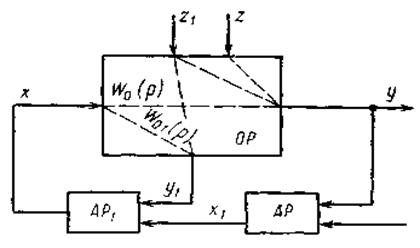
Рис. VI-7. Структурная схема двухконтурной каскадной системы:
ОР - объект регулирования; АР - корректирующий регулятор; AP1 - стабилизирующий регулятор.
Отметим, что качество регулирования существенно улучшается с уменьшением соотношения времени запаздывания в стабилизирующем (![]() ) и корректирующем (
) и корректирующем (![]() ) контурах. Поэтому, если есть возможность выбора вспомогательной величины, то предпочтение следует отдать той, при которой запаздывание в стабилизирующем контуре будет минимальным.
) контурах. Поэтому, если есть возможность выбора вспомогательной величины, то предпочтение следует отдать той, при которой запаздывание в стабилизирующем контуре будет минимальным.
При реализации каскадных систем следует учитывать, что у многих объектов область технологически допустимых значений вспомогательной регулируемой величины у1, которая задается корректирующим регулятором, ограничена и поэтому в схему необходимо вводить устройства для ограничения величины задания стабилизирующего регулятора.
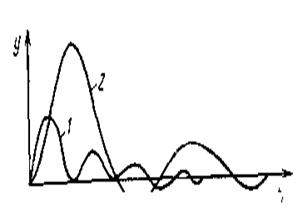
Рис. VI-8. Переходные процессы в каскадной П - ПИ системе (кривая 1) и одноконтурной ПИ системе (кривая 2) при одинаковом ступенчатом возмущении z1.
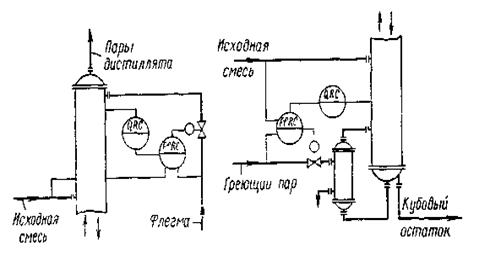
Примером может служить двухконтурная система регулирования температуры низа ректификационной колонны, поддерживаемая изменением подачи греющего пара в кипятильник (рис. VI-9).
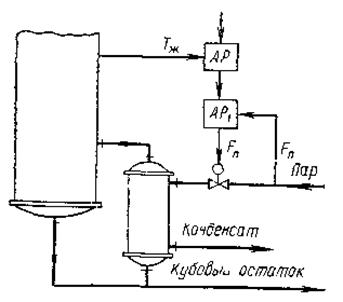
Рис. VI-9 Схема двухконтурной каскадной АСР температуры в отгонной части ректификационной колонны.
Кипятильник представляет собой инерционный объект с большим запаздыванием. В таком случае применение одноконтурного регулирования температуры с воздействием на подачу пара в кипятильник обычно не обеспечивает высокого качества регулирования. Поэтому в схему вводят стабилизирующий контур регулирования расхода греющего пара; обладая большим быстродействием, этот контур компенсирует возмущения по изменению как расхода, так и давления греющего пара. Остальные возмущения компенсируются регулятором температуры, который воздействует на задатчик регулятора расхода.
Продукт реакции
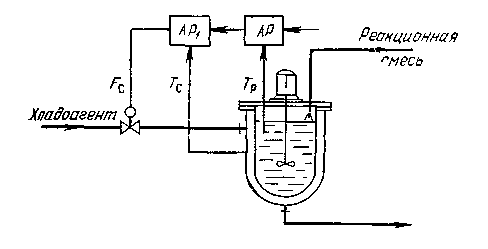
Рис. VI-10. Схема двухконтурной каскадной АСР температуры в химическом реакторе.
На рис. VI-10 приведена двухконтурная АСР температуры в химическом реакторе посредством изменения расхода охлаждающей жидкости в рубашке реактора. С целью обеспечения более высокого качества регулирования, в схему введен стабилизирующий контур, в который входит регулятор АР1 поддерживающий температуру охлаждающей жидкости Тс в рубашке реактора. Значение этой температуры задается регулятором АР корректирующего контура регулирования температуры реакционной смеси Тр в реакторе.
Выбор типов стабилизирующего и корректирующего регуляторов каскадных АСР, а также определение оптимальных значений их настроечных параметров представляет собой более сложную задачу, чем в случае одноконтурных АСР. Так как по инерционности корректирующий контур существенно превосходит стабилизирующий, можно предположить, что в стабилизирующем контуре заканчивается переходный процесс раньше, чем он возникает в корректирующем. При этом условии выбор регуляторов и расчет их настроечных параметров можно проводить раздельно, как для двух одноконтурных АСР.
Комбинированные АСР
Комбинированные АСР реализуют комбинированный принцип регулирования. Структурная схема такой системы, учитывающей одно возмущение, приведена на рис. VI-15. Текущие значения регулируемой величины у и возмущения z1 подаются соответственно через измерительные преобразователи ИП и ИПВ на автоматические регуляторы АР и АРВ. После алгебраического суммирования выходы этих регуляторов направляются на вход объекта в качестве управляемой величины х. Воздействие на объект осуществляется по двум каналам: разомкнутому и замкнутому. С помощью разомкнутого канала обеспечивается быстрое воздействие на объект еще до отклонения регулируемой технологической величины от заданного значения, а с помощью замкнутого канала обратной связи осуществляется качественное поддержание регулируемой величины на заданном значении посредством текущего контроля ошибки регулирования.
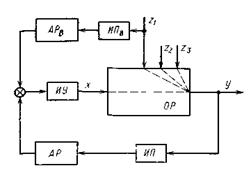
Рис. VI-15. Структурная схема комбинированной системы регулирования: ОР — объект регулирования; ИП, ИПВ —измерительные преобразователи; АР — автоматический регулятор; АРВ —автоматический регулятор по возмущению; ИУ — исполнительное устройство.
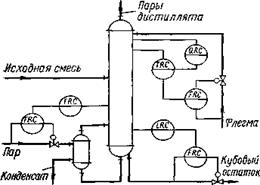
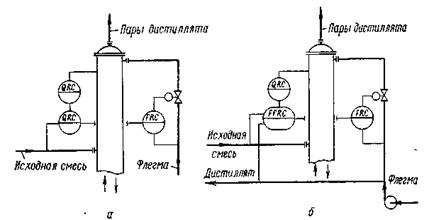
Пример комбинированной системы приведен на рис. VI-16. Система предназначена для регулирования температуры на контрольной тарелке укрепляющей части ректификационной колонны, которое осуществляется регулятором АР, изменяющим подачу флегмы в колонну. На расход флегмы также воздействует контур регулирования по возмущению (регулятор АРВ), компенсирующий основное возмущение объекта — изменение состава сырья колонны.
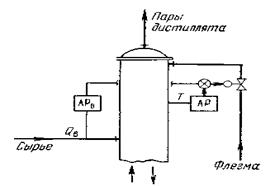
Рис. VI-16. Схема комбинированной системы регулирования температуры верха ректификационной колонны, учитывающая изменение состава исходной смеси.
Каскадно-комбинированные АСР
В некоторых случаях применяют также каскадно-комбинированные системы регулирования, имеющие, как минимум, три контура: стабилизирующий, корректирующий и осуществляющий регулирование по возмущению (рис. VI-17,а).
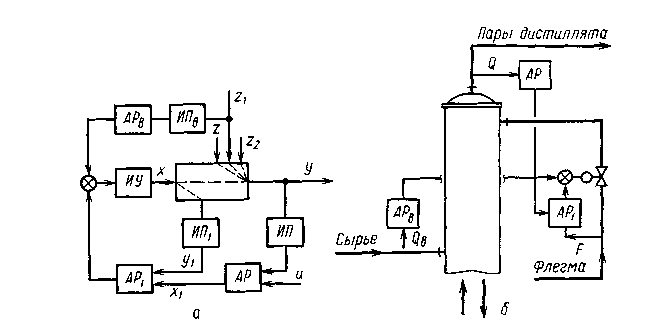
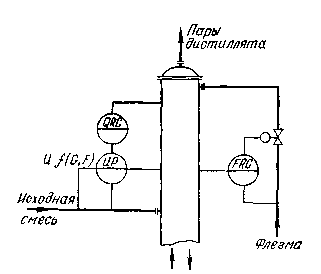
Рис VI-17. Структурная (а) и принципиальная (б) схемы каскадно-комбинированной системы регулирования.
Так при регулировании состава паров дистиллята, отводимых из верха колонны (регулятор АР) для повышения качества регулирования используют быстродействующий стабилизирующий контур регулирования расхода флегмы в колонну (регулятор AP1), а также контур регулирования по возмущению (регулятор АРВ), учитывающий изменение состава сырья, поступающего в колонну (рис. IV-17,б).
Системы регулирования соотношения
Системы регулирования соотношения относятся к следящим системам. Так, исходная смесь и флегма должны поступать в ректификационную колонну в определенном соотношении. При этом ведущей технологической величиной является расход смеси, а ведомой — расход флегмы. Это реализуется с помощью регулятора соотношения, который воздействует на расход флегмы. Аналогично регулируют соотношения следующих расходов: топливо и воздух в процессах горения; два вещества, подаваемые в химический реактор; сырье и пар, подаваемые в трубчатые печи пиролиза углеводородов, и др.
Иногда используют схемы регулирования, в которых предусмотрено изменение соотношения двух расходов в зависимости от текущего значения третьей технологической величины. Например, соотношение расходов топливного газа и воздуха, подаваемых в трубчатую печь, корректируют по содержанию кислорода в дымовых газах.
Тепловые процессы играют значительную роль в химической технологии. Химические реакции веществ, а также их физические превращения, как правило, сопровождаются тепловыми явлениями. Тепловые эффекты часто составляют основу технологических процессов. В связи с этим, вопросы автоматизации теплообменников, трубчатых печей, выпарных аппаратов и других объектов химической технологии, связанных с передачей тепла, играют существенную роль.
Похожие работы
... теплоносителя и топливных ресурсов. Рассмотрим такую систему теплоснабжения шахты (см. рис.1), которая, по мнению авторов, учитывает выдвинутые выше требования. [1]. В ее основу заложена многоконтурная система автоматического управления шахтными котельными, т.е. такая система, в которой присутствует несколько контуров управления – по числу основных технологических параметров топок НТКС. В данной ...
... элементов, входящих в состав регулятора. Ниже мы рассмотрим основные законы регулирования, разновидности САР и регуляторов. 1.5 Разновидности систем автоматического регулирования Большое разнообразие современных САР не позволяет определить их однозначную классификацию, так как системы различных типов имеют свои функциональные признаки. Однако, объединение САР в классификационные группы ...
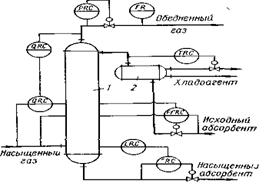
... количество жидкости, уровень которой поддерживается регулятором, управляющим клапаном, установленным на линии отвода насыщенного абсорбента в десорберы. Рис VII-19 Схема многоконтурного (каскадно-комбинированного) регулирования процесса абсорбции: 1 - абсорбер; 2 - холодильник. Автоматизация процесса ректификации Задача управления процессом ректификации состоит в получении целевого ...

... размечают в логарифмическом масштабе, где изменение частоты в 10 раз называется декадой, амплитуду откладывают в децибелах и фазу q в градусах. 1.4 Анализ устойчивости непрерывных и дискретных систем Системы стабилизации должны обеспечивать устойчивость и заданную точность регулирования отклонений углов и координат центра масс ЛА от программных значений. При этом могут налагаться ограничения ...
0 комментариев