Постановка задачи на дипломное проектирование
Обоснование модернизации станка
Построение графика частот вращения
Расчет клиноременной передачи
Расчет потерь на трение в подшипниках качения валов
Проектирование узла ползуна
Исследовательская часть
Расчет затрат на проведение модернизации
Расчет защитного заземления
Возможные чрезвычайные ситуации на объекте
Навигация
Построение графика частот вращения
Модернизация поперечно–строгального станка с ходом ползуна 700 мм на базе модели 7307
112587
знаков
6
таблиц
26
изображений
3.4 Построение графика частот вращения
График частот вращения (рисунок 11) отражает частоты вращения всех валов привода, включая валы одиночных передач, необходимых для его компоновки. Построение начинают с цепи редукции, обеспечивающей снижение частоты вращения электродвигателя nэд. до nmin на шпинделе. Для дальнейшего построения используется структурная сетка.
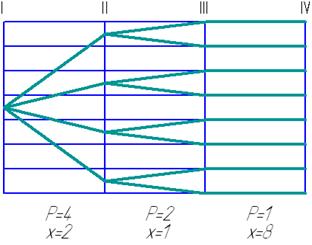
Рисунок 10 – Структурная сетка
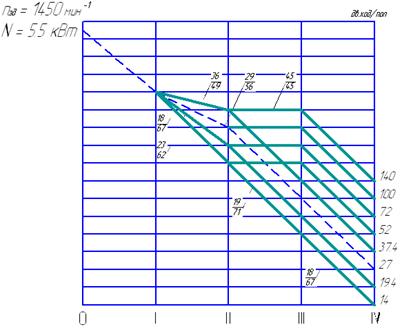
Рисунок 11 – График числа двойных ходов ползуна
3.5 Определение передаточных отношений в группах передач
Для определения передаточных отношений используются построенные графики частот вращения.
Передаточное отношение передачи u, определяется выражением:
u = jk, (3.17)
где k – число интервалов между горизонталями, перекрытых лучами, соединяющими отметки частот вращения на соседних валах.
3.6 Определение чисел зубьев передач
При определении чисел зубьев исходят из постоянства межосевого расстояния и числа зубьев, определяют по следующим формулам:
 , (3.18)
, (3.18)
 , (3.19)
, (3.19)
![]() , (3.20)
, (3.20)
![]() (3.21)
(3.21)
где z1 и z2 – числа зубьев ведущего и ведомого колес;
z0 – сума чисел зубьев сопряженных колес;
f – числитель передаточного отношения;
g – знаменатель передаточного отношения;
K – наименьшее кратное сумм (f + g);
Е – целое число;
zmin= 18 – минимальное число зубьев.
В соответствии с полученными числами зубьев передач, вычерчивается вариант кинематической структуры (рисунок 12).
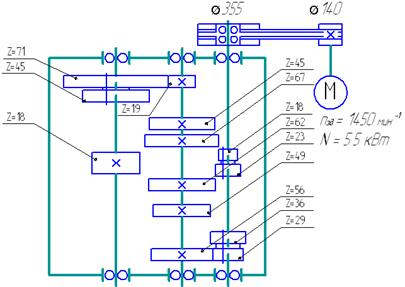
Рисунок 12 – Кинематическая структура коробки скоростей
3.7 Определение крутящих моментов на валах коробки скоростейКрутящие моменты на валах Т, Н·м, могут быть найдены по формуле:
![]() (3.22)
(3.22)
где Рэд. – мощность на валу двигателя, кВт;
h – КПД участка кинематической цепи от двигателя до рассчитываемого вала;
n – расчетная частота вращения вала, об/мин.
Кинематический расчет коробки скоростей выполнен с использованием программы «SIRIUS 2». Результаты расчета находятся в приложении А.
3.8 Расчет прямозубой эвольвентной передачи
Определение модуля зубчатой передачи расчетом на контактную выносливость зубьев
Для прямозубой цилиндрической передачи модуль mн, мм, определяется по формуле:
 (3.23)
(3.23)
где Kd – вспомогательный коэффициент; для прямозубых передач Kd = 770;
z1 – число зубьев шестерни;
T1 – вращающий момент на шестерне, Н×м;
u – передаточное отношение передачи;
sНР – допускаемое контактное напряжение, МПа;
KHb – коэффициент, учитывающий распределение нагрузки по ширине венца;
 (3.24)
(3.24)
где b – рабочая ширина венца зубчатой передачи;
d1 – делительный диаметр шестерни.
Определение модуля зубчатой передачи расчетом на выносливость зубьев при изгибеДля прямозубой цилиндрической передачи модуль mF, мм, определяется по формуле:
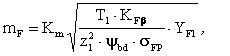 (3.25)
(3.25)
где Km – вспомогательный коэффициент; для прямозубых передач Km = 14;
KFb – коэффициент, учитывающий распределение нагрузки по ширине венца при изгибе;
sFP – допускаемое изгибное напряжение, МПа;
YF1 – коэффициент учитывающий форму зубьев шестерни.
Определение стандартного модуля зубчатой передачиИз полученных расчетных значений mH и mF выбирается наибольшее значение и округляется в сторону увеличения до стандартного модуля по ГОСТ 9563 – 60. При этом должно выполняться следующее условие:
m1 £ m2 £ … £ mk, (3.26)
где m1 – модуль зубчатых передач группы, расположенной первой от электродвигателя;
mk – модуль зубчатых передач группы, расположенной последней от электродвигателя.
Определение межосевого расстояния зубчатой передачиДля прямозубой цилиндрической передачи межосевое расстояние А, мм, определяется по формуле:
![]() (3.27)
(3.27)
где m – стандартный модуль передачи, мм;
z2 – число зубьев зубчатого колеса, сопряженного с шестерней.
При определении межосевых расстояний по группам передач должно выполняться следующее условие:
Aw1 £ Aw2 £ … £ Awk, (3.28)
где Aw1 – межосевое расстояние передач группы, расположенной первой от электродвигателя;
Awk – межосевое расстояние передач группы, расположенной последней от электродвигателя.
Расчет прямозубой эвольвентной передачи выполнен с использованием программы «SIRIUS 2». Результаты расчета находятся в приложении Б.
0 комментариев