Навигация
2. Модернізований привід
Конструкція модернізованого приводу використовує широко-регульований двигун. Така конструкція є найбільш досконалою, тому що має мінімальну кількість кінематичних елементів, а саме: двигун, два шківи та поліклиновий пас. Двигун, установлений на підмоторній плиті, що дозволяє за допомогою гвинтової пари регулювати натяг паса. Плита до станини закріплюється гвинтами.
Датчик зворотного зв'язку за швидкістю обертів шпинделя закріплений на кронштейні на шпиндельній бабці. Шківами та зубчастим пасом датчик зв'язаний зі шпинделем Швидкісні можливості привода надають експлуатації верстата деякі особливості. Якщо технологічний процес обробки деталі включає роботу на максимальних частотах обертання, то щоб запобігти перевантаженню привода рекомендується в управляючу програму закласти "поетапний" набір швидкості від стану спокою. Крім того, після тривалої зупинки верстата (при вмиканні після багатогодинного простою, після вихідних днів) рекомендується перед початком роботи прогрівати шпиндельний вузол послідовним вмиканням по 5 хвилин ступінчасто збільшуваної частоти обертання так, щоб загальний час складав 15-25хв.
В такій схемі привода з широко-регульованим двигуном на частотах обертання до 500 хв"1 слабкою ланкою є пас, а на більш швидких — електродвигун..
3. Кінематичний розрахунок модернізованого привода
Вихідні параметри:
Максимальна частота обертання шпинделя- ![]() 4200 хв-1
4200 хв-1
Потужність двигуна- ![]() 8 кВт
8 кВт
Привод шпинделя з плавним (безступеневим) регулюванням швидкості в сучасних металорізальних верстатах містить багатошвидкісний двигун постійного струму серії 4П.
За заданою потужністю вибираємо електродвигун по [2, табл.3.1, с.48] 4ПФ112SBT.
Технічні характеристики двигуна 4ПФ112SВТ:
Потужність двигуна, кВт - 8
Максимальні оберти двигуна, хв-1 (nдв.max).-4800
Номінальні оберти (nн)-. 2060
Діапазон регулювання:
XN- 3,7
RN- 2,35
ККД, %-. 88,2
Розрахунок пасової передачі
Передаточне відношення пасової передачі:
Згідно [1, гл.3] та [2, гл.4] в приводі модернізованого верстату використовуємо поліклинову пасову передачу.
Розрахунок будемо вести згідно [1, п.3.4.1.]
Сформулюємо вихідні дані:
![]()
![]()
![]()
Кутова швидкість ведучого шківа:
 (рад/с)
(рад/с)
Момент на швидкохідному валу:
 (Нм)
(Нм)
Згідно [1, табл.3.5.] вибираємо пас з перерізом L.
Діаметр малого шківа:
![]() (мм)
(мм)
Округлюємо знайдене значення до стандартного, приймемо DM = 160 мм [ГОСТ 1284-88].
Діаметр ведучого шківа:
![]() (мм)
(мм)
Приймаємо за [ГОСТ 1284-88] DБ = 180 мм.
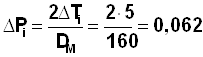
Уточнюємо передатне відношення (враховуючи ковзання: ε = 0,01):

Похибка передатного відношення складатиме:
Така похибка є невеликою, а тому прийнятною (допустиме відхилення до 4%).
Швидкість паса:
 (м/с)
(м/с)
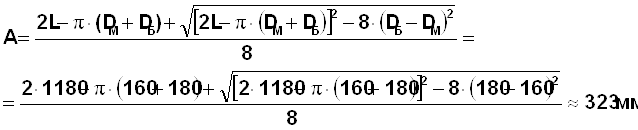
Між осьова відстань:
![]() (мм)
(мм)
![]() (мм)
(мм)
Виберемо для подальшого розрахунку середнє значення А = 263,5 мм.
Розрахункова довжина паса:
 (мм)
(мм)
Приймаємо найближче стандартне значення довжини паса за [ГОСТ 1284-88]:
L = 1180 мм.
Уточнюємо між осьову відстань:
Кут охоплення пасом малого шківа:

Колова сила:
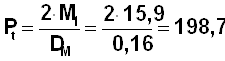 (Н)
(Н)
Коефіцієнт, що враховує вплив кута охоплення малого шківа:
![]()
![]()
Коефіцієнт, що враховує вплив довжини паса:

(тут LO = 1500 мм за [1, табл. 3.6])
Коефіцієнт динамічності навантаження і режиму роботи за [1, табл. 3.6]: СP = 1,0 .
 (Н)
(Н)
![]() (Н)
(Н)
(тут P10 - допустима колова сила для передачі з поліклиновим пасом з 10 ребрами при передаточному відношенні и = 1; куті обхвату малого шківа α1 = 180° і еталонною довжиною LO:L10 = 1120 H)
Число ребер поліклинового пасу:
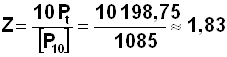
Приймемо остаточно найближче більше парне число ребер Z = 2.
Сила, що діє на вал (її слід враховувати при розрахунках валів та опор):
 (Н)
(Н)
0 комментариев