Призначення та технічна характеристика базового виробу
Технічна пропозиція двох варіантів механізму товаровідтягування
Розрахунок кінематичних параметрів та крутних моментів на валах
Розрахунок динамічних навантажень
Вибір параметрів пружин притиску колеса зубчастого до валу
Розрахунок норми часу на операції на машині
Розрахунок змінної норми виробітку
Стислий опис заходу, який впроваджується
Розрахунок ціни модернізованої плосков’язальної машини «Українка-2»
Аналіз об’єкта модернізації та виробництва для якого він призначений з точки зору безпеки праці та охорони навколишнього середовища
Заходи спрямовані на приведення виявлених небезпечних та шкідливих виробничих факторів до нормативних вимог
Заходи щодо охорони навколишнього середовища
Навигация
Розрахунок динамічних навантажень
Модернізація механізму товаровідтягування побутової трикотажної машини "Українка-2"
78620
знаков
9
таблиц
15
изображений
2.4 Розрахунок динамічних навантажень
Недоліком відомих конструкцій приводів плосков’язальних машин є значні динамічні навантаження, що виникають під час пуску та негативно впливають як на надійність та довговічність їх роботи, так і на якість трикотажного полотна
З огляду на доцільність підвищення ефективності роботи плосков’язальних машин шляхом удосконалення конструкцій їх приводу, спрямованого на зниження динамічних пускових навантажень, є проблема розробки нових конструкцій приводів та методів їх проектування, актуальною для сучасного легкого машинобудування.
Зниження динамічних навантажень в приводі можливе за рахунок попереднього напруження його пружних в’язей, що створює плоска спіральна пружина. Необхідно, щоб обидві обертальні маси приводу, з’єднані пружиною, в період гальмування машини мали однакове прискорення.
Аналіз показує, що процес гальмування плосков’язальної машини може відбуватися за наявності одного або двох гальм. При цьому динамічна модель плосков’язальної машини з приводом, що містить засіб зниження динамічних навантажень, може бути представлена у вигляді двомасової системи (рис. 2.2).
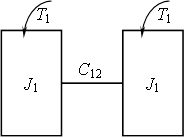
Рис.2.2. Динамічна модель круглов'язальної машини типу: а - привід з одним гальмом; б - привід з двома гальмами
Розглянемо працездатність запропонованої конструкції приводу.
Динамічні умови рівноваги мас системи мають такий вигляд:
![]() (2.26)
(2.26)
![]() (2.27)
(2.27)
де ![]() і,
і, ![]() – момент інерції відповідно першої (сумарний момент інерції ротора електродвигуна і гальма) та другої (сумарний момент обертових мас механізмів машини та другого гальма) мас системи;
– момент інерції відповідно першої (сумарний момент інерції ротора електродвигуна і гальма) та другої (сумарний момент обертових мас механізмів машини та другого гальма) мас системи;
![]() ,
, ![]() – кути повороту відповідно першої та другої мас системи при гальмуванні;
– кути повороту відповідно першої та другої мас системи при гальмуванні; ![]() – гальмівний момент гальма;
– гальмівний момент гальма;
![]() – момент сил пружності пружини;
– момент сил пружності пружини;
![]() – сумарний момент сил опору механізмів машини;
– сумарний момент сил опору механізмів машини;
![]() – жорсткість пружної в’язі системи (жорсткість пружини). Використовуючи рівняння (2.26), (2.27), одержуємо:
– жорсткість пружної в’язі системи (жорсткість пружини). Використовуючи рівняння (2.26), (2.27), одержуємо:
 (2.28)
(2.28)
 (2.29)
(2.29)
Тоді, враховуючи умову працездатності засобу зниження динамічних навантажень – здійснення попереднього напруження пружних в’язей приводу:
![]() (2.30)
(2.30)
можемо записати:
![]() (2.31)
(2.31)
Очевидно, ефективне зниження динамічних навантажень (пуск системи з попередньо напруженими в’язями) може бути досягнуто за умови:
![]() (2.32)
(2.32)
В разі, коли ![]() , вираз (2.31) набуває вигляду:
, вираз (2.31) набуває вигляду:
![]() (2.33)
(2.33)
чого не може бути.
В разі, коли ![]() , вираз (2.32) набуває вигляду:
, вираз (2.32) набуває вигляду:
![]() (2.34)
(2.34)
З рівняння (2.33) знаходимо:
 (2.35)
(2.35)
Очевидно, щоб задовольнити рівняння (2.33), необхідно виконати умову: ![]() , що також не може бути, оскільки для плосков’язальних машин
, що також не може бути, оскільки для плосков’язальних машин ![]() .
.
Розглянемо працездатність запропонованої конструкції приводу за наявності в його складі двох гальм.
Динамічні умови рівноваги мас системи для цього режиму гальмування мають вигляд:
![]() (2.36)
(2.36)
![]() (2.37)
(2.37)
де ![]() ,
, ![]() – гальмівні моменти відповідно першого та другого гальм. Використовуючи рівняння (2.34), (2.35), одержуємо:
– гальмівні моменти відповідно першого та другого гальм. Використовуючи рівняння (2.34), (2.35), одержуємо:
 (2.38)
(2.38)
 (2.39)
(2.39)
Прийнявши в рівняннях (2.38), (2.39) ![]() та враховуючи умову (2.30), одержуємо:
та враховуючи умову (2.30), одержуємо:
![]() (2.40)
(2.40)
Із виразу (2.40) знаходимо:
 (2.41)
(2.41)
Час гальмування машини буде дорівнювати:
 (2.42)
(2.42)
де ![]() – кутова швидкість вала електродвигуна (в разі якщо за вал приведення параметрів динамічної моделі прийнято вал електродвигуна).
– кутова швидкість вала електродвигуна (в разі якщо за вал приведення параметрів динамічної моделі прийнято вал електродвигуна).
Враховуючи (2.40), (2.41) вираз (2.42) набуває остаточного вигляду:
 (2.43)
(2.43)
В разі запропонованого приводу, для якого ![]() Н·м,
Н·м, ![]() кг·м2,
кг·м2, ![]() кг·м2,
кг·м2, ![]() рад/с, величина гальмівних моментів першого та другого гальм згідно з (2.40), (2.41) будуть дорівнювати:
рад/с, величина гальмівних моментів першого та другого гальм згідно з (2.40), (2.41) будуть дорівнювати:
![]() Н·м,
Н·м, ![]() Н·м.
Н·м.
0 комментариев