Навигация
Предельное равновесие балок и рам
18020
знаков
1
таблица
1
изображение
2. Предельное равновесие балок и рам
Приведенное вначале определение предельного состояния системы слишком общее и для достижения результата должно быть конкретизировано. Для балок и рам, материал которых следует диаграмме Прандтля, оно может быть сформулировано:
Предельное состояние балки (рамы) будет достигнуто тогда, когда в ней появится столько пластических шарниров, что система станет кинематически изменяемой.
Нагрузка, соответствующая предельному состоянию системы, называется предельной нагрузкой. Предельную нагрузку можно найти, рассматривая равновесие механизма, который образуется из системы после того, как в ней появится достаточное число пластических шарниров. Полагается, что механизм перехода в предельное состояние представляет собой абсолютно жёсткие звенья, соединённые между собой шарнирами. Таким образом, считают, что зона текучести по длине балки или стержня рамы ограничивается одним сечением – пластическим шарниром. Перемещения механизма, допустимые связями, будем рассматривать, как возможные. Тогда можно записать уравнение работ, используя принцип возможных перемещений:
Суммарная работа всех внешних и внутренних сил на любых возможных перемещениях равна нулю. При решении задач используется кинематический экстремальный принцип (А.А. Гвоздев , 1938г.):Истинной форме перехода в предельное состояние соответствует минимальное значение предельной нагрузки.
Следует учитывать, что кинематический способ определения предельных нагрузок всегда даёт верхнюю оценку несущей способности конструкции.
3. Примеры
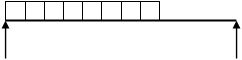
Пример 1. Статически определимая балка на двух опорах загружена силой, приложенной посредине пролёта (Рис. 4). Найти предельную нагрузку для балки.
![]() Fu
Fu
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() a
В a
a
В a
![]()
![]()
![]()
![]() А С
А С
![]() В1
Mu 2a
В1
Mu 2a
![]()
![]() L /2 L /2
L /2 L /2
Рис. 4
Очевидно, что для перехода балки в предельное состояние необходимо появление одного пластического шарнира. Он появится в средине пролёта, под силой. Используем принцип возможных перемещений и запишем уравнение работ: Fu × BB1 - Mu×2a = 0,
здесь учтено, что работа внутренних сил всегда отрицательна, т.к. они направлены в сторону противоположную перемещению. Кроме того, мы полагаем, что т. к. угол a - мал: a = 2ВВ1 / L . Тогда значение предельной силы будет равно:
Fu = 4Mu/ L .
При заданном сечении, а также известном пределе текучести Mu легко вычисляется, согласно изложенному выше и, следовательно, поставленная задача решена.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Пример 2. Двухпролётая, один раз статически неопределимая балка загружена в левом пролёте сосредоточенной силой (Рис. 5). Найти предельное значение силы.
Пример 2. Двухпролётая, один раз статически неопределимая балка загружена в левом пролёте сосредоточенной силой (Рис. 5). Найти предельное значение силы.
F
L 2L 2L
Fu Mu
![]()
![]() A a B b C
A a B b C
![]() Mu B1 a+b
Mu B1 a+b
Схема перехода в предельное состояние
Рис. 5
Предельное состояние будет достигнуто в том случае, если появятся два пластических шарнира – один под силой, другой на опоре С. Уравнение работ запишется:
Fu× BB1 - Mu(a+b) - Mu×b = 0, где: a = BB1/ L ; b = BB1/ 2L ;
тогда: Fu =2,5Mu/ L.
Обратим внимание на тот факт, что для определения предельной нагрузки не было необходимости раскрывать статическую неопределимость балки. Здесь было сразу ясно, что наибольшие изгибающие моменты, а, следовательно, и пластические шарниры образуются под силой и на промежуточной опоре. В более сложных случаях знание упругого состояния может быть полезным, хотя с принципиальной точки зрения необязательным, т. к. можно перебрать все кинематически возможные схемы перехода в предельное состояние и отобрать истинную с помощью кинематического экстремального принципа.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Пример 3. Двухпролётная статически неопределимая балка загружена равномерно распределённой нагрузкой, приложенной в левом пролёте (Рис. 6). Найти предельную нагрузку для балки.
Пример 3. Двухпролётная статически неопределимая балка загружена равномерно распределённой нагрузкой, приложенной в левом пролёте (Рис. 6). Найти предельную нагрузку для балки.
q
L L
![]()
![]()
![]() a qu bMu
a qu bMu
![]()
![]()
![]()
![]() A
B C
A
B C
![]()
![]() DD1 Mu
DD1 Mu
D1
z L a+b
Cхема перехода в предельное состояние
Рис. 6
Балка исчерпает свою несущую способность в том случае, когда в ней появятся два пластических шарнира. Один пластический шарнир возникнет на средней опоре, другой в пролёте под нагрузкой. Положение пластического шарнира в пролёте нам пока неизвестно и мы зададим его безразмерной координатой z (0 < z < 1). Записывая уравнение работ, учтём, что работа равномерно распределённой нагрузки равняется произведению интенсивности нагрузки на площадь фигуры, лежащей под нагрузкой и образованной первоначальным положением оси балки и звеньями механизма, образовавшегося в результате появления пластических шарниров. В нашем случае интенсивность нужно умножить на площадь треугольника ABD1 (Рис. 6). Таким образом, уравнение работ будет выглядеть:
½ qu× DD1×L – Mu( a+b) - Mu ×b = 0; a = DD1/ zL; b = DD1/ ( L(1-z)).
Выражая отсюда qu, получим:
2Mu (1 + z)
qu = ¾¾¾¾¾¾¾ (a)
L2 z (1 - z)
Разным значениям z , т.е. разным положениям пластического шарнира, будут соответствовать разные значения предельной нагрузки qu. Воспользуемся кинематическим экстремальным принципом. Истинному положению пластического шарнира, а, следовательно, истинной предельной нагрузке соответствует минимум выражения (а).
dq / dz = 0 и 2Mu / L2 ¹ 0 Þ
z - z2 - (1 + z)(1 - 2z)
¾¾¾¾¾¾¾¾¾¾¾¾ = 0,
[ z (1 - z) ] 2
Приравнивая числитель нулю, получим квадратное уравнение
z2+ z - 1 = 0,
корни которого равны: z1,2 = - 1 ± Ö 2; z1 = Ö 2 - 1 » 0,414, второй корень не имеет смысла. Подставляя найденное значение z1 в выражение (а), окончательно получим: qu = 11,66 Mu / L2 .
Пример 4. Статически неопределимая однопролётная балка (Рис.7) загружена двумя силами F и 2F. Найти предельное значение F.
Балка исчерпает несущую способность при образовании двух пластических шарниров. Один из них появится в заделке, а другой под одной из сил. Возможны варианты: схема а) - пластический шарнир под силой F, схема б) - под силой 2F (Рис. 7).
Рассмотрим первый случай. Уравнение работ запишется:
2Fu×BB1 + Fu×CC1 - Mua - Mu ( a + b ) = 0; учтём: BB1 = (2/3)CC1;
a = CC1/ 3L; b = CC1 /L , тогда: Fu = 5Mu / 7L » 0,714Mu / L.
Второй случай нам даст:
2Fu×BB1 + Fu×CC1 - Muj - Mu×2j = 0; CC1 = ½BB1 ; j = BB1 / 2L Þ
Fu = 3Mu / 5L = 0,6Mu / L .
Очевидно, что согласно кинематическому экстремальному приципу, реальной будет схема перехода в предельное состояние б), дающая наименьшее значение предельной нагрузки.
Пример 5. Один раз статически неопределимая рама загружена силой F (Рис. 8). Найти предельное значение силы.
BB1
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() F B C Fu B1 C1
F B C Fu B1 C1
Mu Mu
L
a a
A D
A D
L
Cхема перехода в предельное состояние
Рис. 8
Рама перейдёт в предельное состояние, когда в узлах В и С появятся пластические шарниры. Конфигурация возникшего при этом механизма будет определяться одним параметром – углом a. Суммарная работа всех внешних и внутренних сил на возможных перемещениях запишется:
Fu×BB1 – Mu a - Mu a = 0; a = BB1 / L Þ
Fu = 2Mu / L.
Пример 6. Статически неопределимая двухпролётная балка загружена равномерно распределённой нагрузкой q и силой F = qL (L = 1м). Размеры поперечного сечения заданы в мм. Материал – Ст.3 следует диаграмме Прандтля: sy = 240 МПа; коэффициент запаса по текучести n y = 1,5; допускаемое напряжение sadm = sy/ny = 160 МПа. Выполнить следующе:
1) Раскрыть статическую неопределимость и построить эпюру изгибающих моментов для упругой стадии работы балки.
2) Определить для заданного сечения балки, исходя из упругой работы, допускаемую интенсивность нагрузки qadm.
3) Найти предельный момент Mu для заданного сечения.
4) Исходя из расчёта по методу предельного равновесия, найти предельную нагрузку qu. Найти нагрузку quamd, которую можно допустить, основываясь на методе предельного равновесия. Коэффициент запаса по текучести оставить прежним.
1) Раскроем статическую неопределимость. Используем для этого способ ''уравнения трёх моментов''. Разрежем балку над опорой 2 и поместим туда шарнир (Рис. 9). Основная система будет представлять собой две однопролётные балки, эпюры моментов для которых показаны на Рис. 9а. Уравнение трёх моментов для опоры 2 запишется:
2M2 ( 3L + 2L ) = - 6 [( (2/3)(qL2/2)×2L×L + ½(2qL2/3)×2L×(4L/3) +
+ ½(2qL2/3)×L×(7L/3))/(3L) – ½(qL2)×2L×L/(2L)];
откуда найдём опорный момент: M2 = - qL2 /6 » - 0,1667qL2 .
Эпюра опорного момента показана на Рис. 9б. Складывая эпюру опорных моментов с эпюрой моментов в основной системе (Рис. 9а), получим эпюру моментов для статически неопределимой балки (Рис.9в). Найдём максимальное значение момента в левом пролёте, для чего загрузим пролёт 1 – 2, помимо заданной нагрузки, найденным опорным моментом М2 (Рис. 10).
q
![]()
![]()
![]() 0,1667qL2
0,1667qL2
![]()
![]()
![]()
![]()
![]()
![]() R1 z R2
R1 z R2
2L L
Рис. 10
Найдём левую опорную реакцию: R1 = 4qL/3 – 0,1667qL2/3L » 1,2778qL
Изгибающий момент в произвольном сечении с координатой z определится: M = 1,2778qL – qz2 /2; условия экстремума: dM/dz = 0 Þ
z = 1,2778L , max M = 0,8164qL2 .
2) Определим нагрузку, которую можно допустить на балку, основываясь на упругом расчёте. Вначале найдём геометрические характеристики заданного сечения (Рис. 11). Площадь поперечного сечения: А = А1 + А2 = 10 + 12 = 22 см2. Определим положение центра тяжести сечения.
Найдём статический момент площади поперечного сечения относительно оси x2: Sx2 = A1b = 10×4 = 40 см3. Координата центра тяжести определится: b2 = Sx2 /A = 40 / 22 » 1,82см.
![]() Момент инерции сечения:
Момент инерции сечения:
A1 Ix = Ix1 + A1b12 + Ix2 + A2b22 =
![]()
![]()
![]()
![]()
![]() x1 = 5×23/12 + 10×2,182 + 2×63/12 +
x1 = 5×23/12 + 10×2,182 + 2×63/12 +
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() b1 + 12×1,822 = 126,5 см4 .
b1 + 12×1,822 = 126,5 см4 .
![]()
![]() b o
x
b o
x
![]()
![]() b2
Момент сопротивления сечения:
b2
Момент сопротивления сечения:
![]()
![]() A2 ymax x2
A2 ymax x2
Wx = Ix/ymax = 126,5 / 4,82 = 26,2 см3.
Рис. 11
Допускаемую нагрузку можно найти, приравняв максимальные напряжения в балке допускаемым:
smax = max M / Wx = sadm Þ 0,8164qadmL2 / Wx = sadm Þ
qadm = ( sadmWx ) / ( 0,8164L2 ) = ( 160×106 Па × 26,2 ×10 – 6 м3/
( 0.8164 × 1м2 ) = 5135 Н / м = 5,135 кН / м .
3) Положение нейтральной оси в предельном состоянии найдём, приравняв площади сжатой и растянутой зон (Рис. 12):
![]()
![]()
![]() 10 + ( 6 – y ) × 2 = 2 × y Þ y = 5,5см.
10 + ( 6 – y ) × 2 = 2 × y Þ y = 5,5см.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() А-
А-
x0 Пластический момент сопротивления:
y Wпл = ç Sxo- ç + ç Sxo+ ç =
![]() = 10 × 1,5 + ½ × 0,52 × 2 + ½ × 5,52× 2 =
= 10 × 1,5 + ½ × 0,52 × 2 + ½ × 5,52× 2 =
A+ = 45,5см 3.
Рис. 12
Предельный момент для сечения:
Mu = syWпл = 240× 106 Па × 45,5 × 10 – 6м 3 = 10920 Н× м = 10,92 кН× м
4) Балка перейдёт в предельное состояние тогда, когда в ней образуются два пластических шарнира. Один из них появится в правом пролёте, под силой. Положение второго, который возникнет в левом пролёте, под нагрузкой, нам пока неизвестно. Зададим его безразмерной координатой z (0 < z < 2). Механизм перехода в предельное состояние показан на Рис. 13.
Запишем уравнение работ внешних и внутренних сил на перемещениях, возникших в механизме. Работа распределённой нагрузки будет равна произведению интенсивности нагрузки на площадь фигуры, образованной осью балки в первоначальном состоянии, отрезком СС1 и отрезками, лежащими под нагрузкой и совпадающими со звеньями механизма.
½ ×qu [ BB1zL + BB1L(3 -z) – CC1L ] + quL ×DD1 – Mu(a+b) - Mu×2b = 0.
входящие в уравнение отрезки и углы выразятся через ВВ1:
CC1 = DD1 = BB1 / (3 - z); a = BB1 / (zL); b = BB1 / ((3-z)L).
Подставив это в уравнение работ, и решив его относительно предельной нагрузки, имеем:
2Mu ( 3 + 2z )
qu = ¾¾¾¾¾¾ .
L2 z( 10 – 3z )
Истинному положению пластического шарнира в левом пролёте соответствует минимум предельной нагрузки (см. пример 3): dqu / dz = 0 .
Приравнивая в полученном выражении для производной числитель нулю, получим квадратное уравнение z2 + 3z - 5 = 0, решив которое найдём корни: z1 = 1,1926 и z2 = - 4,1926 (не имеет смысла). Подставив первый корень в выражение для qu, получим истинное значение предельной нагрузки для балки:
qu = 1,406 Mu / L2 = 1,406×10,92 кН×м / 1м2 = 15,35 кН / м.
Если принять такой же коэффициент запаса по текучести, что и при упругом расчёте, то, исходя из расчёта по предельным нагрузкам, на балку может быть допущена нагрузка:
qadmu = qu/ ny = ( 15,35 кН / м ) / 1,5 = 10,23 кН / м .
Обратим внимание на то, что это значительно больше, чем даёт упругий расчёт. Отношение значений нагрузок по двум методам расчёта равняется: qadmu / qadm= 10,23 / 5,135 = 1,99. Т.е. расчёт по методу предельного равновесия позволяет в данном случае увеличить нагрузку на балку в два раза.
Интересно отметить и тот факт, что пластический шарнир появился не в том месте, где в упругой стадии был максимальный изгибающий момент (z = 1,2778). Это обстоятельство говорит о том, что за пределами упругости происходят перераспределения усилий.
Заключение
Как уже отмечалось в п.2, кинематический метод всегда даёт верхнюю оценку предельной нагрузки, имея которую, мы не знаем, насколько она превышает истинную. По этой причине в расчёт приходится вводить дополнительный запас прочности. Помимо кинематического метода, существует статический метод определения предельных нагрузок. Он состоит в том, что рассматриваются статически возможные состояния и любая нагрузка, соответствующая произвольному статически возможному состоянию системы, меньше предельной нагрузки. Статический метод всегда даёт нижнюю оценку предельной нагрузки. Если бы мы могли решить задачу одновременно и кинематическим и статическим методами, то получили бы двухстороннюю оценку, что решило бы проблему. Однако нахождение статических решений в большинстве случаев весьма сложно, и точная оценка возможна для немногих задач.
Необходимым условием использования метода предельного равновесия является достаточная пластичность материала. Кроме того нагрузка должна быть статической или близкой к ней. Нельзя использовать этот метод при изменяющихся во времени напряжениях, т.к. в этом случае решающим фактором будет усталостная прочность. Эти обстоятельства сужают базу применения метода в машиностроительной практике. И, тем не менее, преимущество метода, заключающееся в значительной экономии материала, столь очевидно, что метод предельного равновесия надо использовать всегда, когда это возможно.
ЛИТЕРАТУРА
1. Феодосьев В.И. Сопротивление материалов. – М. : Наука. – 1986. – 512 с.
2. Малинин Н.Н. Прикладная теория пластичности и ползучести. – М.: Машиностроение. – 1968. – 400 с.
3. Ржаницын А.Р. Строительная механика. – М.: Высшая школа. – 1991. – 440 с.
4. Работнов Ю.Н. Механика деформируемого твердого тела. – М.: Наука. - 1979. – 744 с.
5. Лешковцев В.Г., Покровский А.М., Зарубин С.В. Расчет предельных нагрузок в стержневых системах. – М.: МГТУ. – 1993. – 36 с.
6. Гречанинов И.П., Рынковенко О.В. Расчеты за пределами упругости. – М.: МВТУ. – 1986. – 12 с.
Похожие работы
... , необходимых для осуществления проектного решения. СНиП 11-01-95 “Инструкция о порядке разработки, согласования, утверждения и составе проектной документации на строительство предприятий, зданий и сооружений”. Проект состоит из технологической и строительно-экономической частей. Экономическое обоснование технологической части выполняется инженерами-технологами и экономистами-технологами, а ...
... восстановительный ремонт деталей и узлов вагона, таких как кассетные роликовые подшипники, автосцепка, поглощающие аппараты и др. Проблема полного и своевременного обеспечения перевозок грузовыми вагонами нового поколения выдвигается сегодня в число наиболее злободневных и первоочередных. Концепция трехэлементных тележек с дополнительными межосевыми связями была разработана Г.Шеффелем. Идея ...

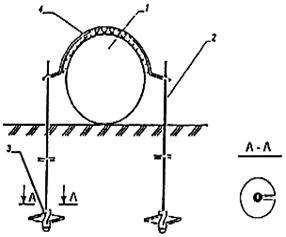
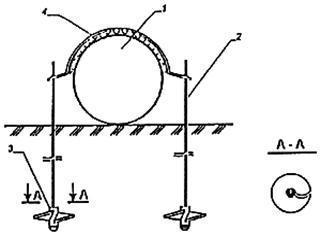
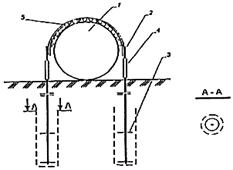
... анкерных устройств на трубопроводе. Раскрытие лопастей анкера фиксируется по резкому увеличению показаний динамометра при нагрузках от 25 до 40 т(с, ход анкера составляет 120-150 см. Закрепление трубопроводов анкерными устройствами АР-401 осуществляется специальной бригадой, состав которой колеблется в зависимости от сезона производства работ. Забивка анкеров АР-401 в грунт производится с ...
... , сложенных известняками или доломитами. Мрамор довольно устойчив к «обычному» выветриванию, сохраняет крутые, вплоть до «отвесных», природные склоны. 3. Назовите основные физико-механические свойства горных пород, необходимые для проектирования и строительства. Опишите условия образования и строительные свойства морских грунтовых отложений Основные физико-механические свойства горных пород ...
0 комментариев