Навигация
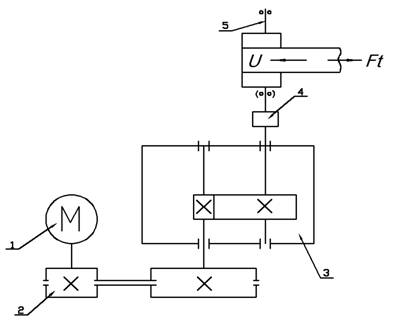
Выбор электродвигателя. Электродвигатель серии 4А асинхронный с короткозамкнутым ротором
15537
знаков
1
таблица
0
изображений
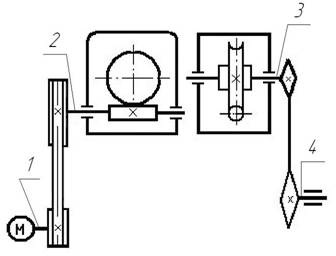
1.1 Выбор электродвигателя. Электродвигатель серии 4А асинхронный с короткозамкнутым ротором
Определяем мощность на валу барабана конвейера
Рб = Тб nб / 9550 – мощность [кВт]
Рб = 500*100 / 9550 = 1,67
Требуемая мощность электродвигателя. (Из-за потерь в подшипнике).
Рэ = Рб / ŋ – в зубчатом колесе и в ременной передаче,
где ŋ – общее КПД привода
ŋ = ŋ²п ŋр ŋз,
где
ŋ²п - КПД подшипниковой передачи
ŋр – КПД ременной передачи
ŋз – КПД зубчатой передачи
Из табл. П1 с.64 [1]
Выбираем: ŋп = 0,99; ŋр = 0,94; ŋз = 0,96
ŋ = (0,99)² * 0,94 * 0,96 = 0,89
Рэ = 1,67 / 0,89 = 1,87
Из табл. П2 с.65 [1]
Выбираем стандартную мощность электродвигателя с условием
Р´э ≥ ´Рэ
Рэ = 2.2 кВт
Т.к. частота вращения nс = 1500 об/мин; число полюсов 4 и S% = 5,1, то
По табл. П2 с.65 [1] выбираем условное обозначение электродвигателя
4А132S5
1.2 Кинематический расчет привода
Определяем асинхронную частоту вращения.
nq = nc (1 – (S% / 100))
nq = 1500(1-(5.1 / 100)) = 1423
Определяем общее передаточное число привода.
U = nq /nб
U = 1423/160 = 8.9
U = Uз * Uр,
где Uз – передаточное число зубчатой передачи; Uр - передаточное число ременной передачи По табл. П1 с.64 [1] выбираем передаточное число для зубчатой и ременной передач.
Uз = 3,5, а Uр = U/Uз = 8,9/3,5 = 2,5
Определяем частоты вращения валов зубчатого редуктора.
Ведущий вал n1 = nq / np
Ведомый вал n2 = n1 / Uз
n1 = 1423/2.5 = 569
n2 = 569/3.5 = 160
Определяем крутящие моменты на валах привода.
Ведомый вал Т2 = Тб
Т2 = 160
Ведущий вал Т1 = Т2 / Uз*ŋп*ŋз
Т1 = 160 / 3,5*0,99*0,96 = 160 / 3,34 = 50
Вал электродвигателя Тэ = Т1 / Up*ŋп*ŋз
Тэ = 50 / 3,5*0,99*0,96 = 50 / 2,4 = 21
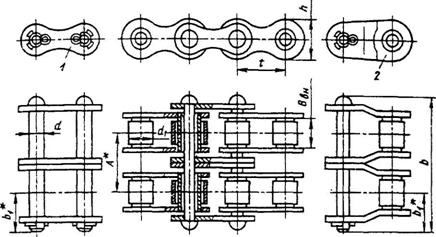
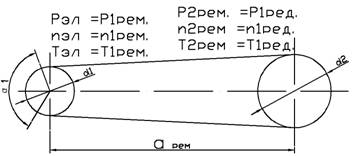
2. Расчет ременной передачи
2.1 Определяем максимальный расчетный момент на ведущем шкиве
Трmax = Тэ [0,5(кд+1)+креж], где
креж – коэффициент режима работы, определяется по табл. П6 с.67 [1], в зависимости от числа смен.
кд = 2; креж = 1
Тmax = 21[0,5(2+1)+1] = 53
По табл. П5 с.66 [1]
Так как 15нм < Трmax < 60нм
lo = 1700мм
m = 0,105 кг/м
a = 90 min
По табл. П7 с.68 [1] назначаем диаметр ведущего шкива
dз = 140 мм
Диаметр ведомого шкива
d4 = d3 * Uз * 0,985
d4 = 140 * 2,5 * 0,985 = 345мм
Согласовываем d4 с R 40 по табл. П4 с.66 [1]
d4 = 355 мм
Определяем минимальное межцентровое расстояние
amin ≈ d4
amin ≈ 355мм
Определяем необходимую минимальную длину ремня
lmin = 2 amin + [π(dз + d4)/2] + [(d4 – dз)²/4 amin]
lmin = 2 *355 + [3.14(495/2] + [(355 – 140)²/4 * 355] = 1521
Выбираем стандартный ремень по табл. П5 с.66 [1]
l > lmin
l = 1600 мм
Уточняем межцентровое расстояние
а = amin + 0,5(l - lmin)
a = 355 + 0.5(1600 – 1521) = 394 мм
Определяем угол обхвата ведущего шкива
αз = π – [d4 – dз / a]
αз = 3.14 – [355 – 140 / 394] = 2.6 рад
Определяем линейную скорость ремня
V = π * d4 * n1 / 60 * 1000
V = 3.14 * 355 1423 / 60000 = 10.4 м/с
Определяем число пробега ремня
γ = 10³*V / l
γ = 10³ * 10.4 / 1600 = 6.5
Определяем требуемое число ремней
z ≥ Pэ [a5(kд + 1) + kреж] / Ро*Ср*Сl*Cα*Cz , где
Ро – мощность передаваемая одним ремнем, определяется по табл. П7 с.68 [1] в зависимости от диаметра ведущего шкива dз и линейной скорости V;
Ср. – коэффициент нагрузки определяется по табл. П6 с.67 [1] в зависимости от кmax;
Сl – коэффициент учитывающий длину ремня
Сl = 0,3 * (l/lo) + 0.7
Cα – коэффициент учитывающий угол обхвата ведущего шкива
Cα = 1 – 0,15 (π – αз)
Cz – коэффициент учитывающий число ремней с.8 [1]
Ро = 291
Ср = 0,75
Сl = 0,3*(1600/1700) + 0,7 = 1
Cα = 0,95
z ≥ 1.8[0.5(2 + 1) + 1] / 2.01*0.9*1*0.95 = 3
z ≥ 3
z = 3
Cz = 0.95
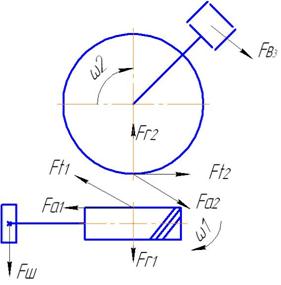
Определяем полную, передаваемую окружную силу
Ft = 2000*Tэ / d3
Ft = 2000*21 / 140 = 300 Н
Определяем силу предварительного натяжения
Fo = 0.78*Ft / z*Cα*Cp + qm*V², где
qm – масса единицы ремня, определяется по табл. П5 с.66 [1].
Т.к. V < 10, то qm*V² не учитывается.
Fo = 0.78*300 / 3*095*0.75 = 106 Н
Сила давления на валы
Fв = 2 Fo z sin (α3/2)
Fв = 2*106*3*sin (75) = 614 H
Похожие работы
... *0,72*0,992=3,764 кВт; Р4=Р3 η3=5,124*0,95=3,576 кВт, что близко к заданному. Определяем вращающие моменты на каждом валу привода по формуле (Нм) (2.5) ; ; ; . Все рассчитанные параметры сводим в табл.1. Таблица 1 Параметры кинематического расчета № вала n, об/мин ω, рад/с Р, кВт Т, Нм U Дв. (1) 1444,5 151,27 5,5 36,35 2 ...
... – проектный (приближенный) расчет валов на чистое кручение , 2-й — проверочный (уточненный) расчет валов на прочность по напряжениям изгиба и кручения. 1. Определение сил в зацеплении закрытых передач. В проектируемых приводах конструируются червячные редукторы с углом профиля в осевом сечении червяка 2а = 40° .Угол зацепления принят α= 20°. а) на колесе: 1.1 Окружная сила Ft2, Н: Ft2= где T2 ...
... Uред.ст = 5,6. Уточним полученное значение передаточного отношения клиноременной передачи: Uкл.рем.ст. = Uпр / Uред.ст. = 10,8 / 5,6 = 1,93 Определим значения мощности на каждом из валов привода конвейера. Мощность на выходном валу электродвигателя (кВт) определяется по формуле (9). Ртреб.эл. = Ррем1 = 8,87 кВт (9) Мощность на входном валу ...
... по программе, устанавливаемой техническими условиями. Заключение По данным задания на курсовой проект спроектирован привод к скребковому конвейеру, представляющий собой электродвигатель, двухступенчатый цилиндрический косозубый редуктор и сварную раму. В процессе проектирования подобран электродвигатель, произведён расчёт редуктора. Расчёт редуктора включает в себя кинематические расчёты ...
0 комментариев