Навигация
Проектирование электродвигателя транспортера
19194
знака
4
таблицы
2
изображения
1.1 Технологическая характеристика рабочей машины Транспортер предназначен для транспортирования измельченных грубых кормов (сенажа, силоса, сена) от башенных кормохранилищ в кормовой тамбур коровника для последующей раздачи животным или складирования в емкости-накопители. Он может транспортировать корма одновременно от нескольких башен и подавать их на расстояние до 50 метров и высоту до 6 метров.
1.2 Определение мощности рабочей машины при номинальном режиме работы и при холостом ходе
1.3. Расчет и построение механических характеристик и нагрузочных диаграмм рабочих машин.
Транспортер ТКС-6 включает в себя два транспортера – горизонтальный 10 (рис.1) и наклонно-горизонтальный 4, устроенные практически одинаково.
Горизонтальный транспортер состоит из соединенных между собой желобов различной длины. В комплект входят три желоба длиной 0,6 метров, четыре – 1,2 метра, и двадцать – 2,4 метра. При монтаже желоба соединяются болтами. Каждый желоб имеет угловые рамки 14, к которым приварены верхние 16, нижнее днище 15 и боковые стенки 18. Сверху на желобе закреплена крышка 13 при помощи пружинных защелок. Для удобства пользования на крышке имеются ручки. Верхнее днище вместе с боковыми стенками образует рабочее пространство. По которому перемещается кормовая масса. Нижнее днище не огорожено боковыми стенками. Ширина желоба – 416 мм.
Несущий рабочий орган – цепочно-планчатый транспортер, состоящий из двух втулочно-роликовых цепей 20 с шагом 38 мм. На расстоянии 380 мм один от другого к ушкам звеньев цепи болтами присоединены деревянные скребки 19 длиной 335 мм, шириной 20 и высотой 55 мм. Цепочно-планчатый транспортер установлен на звездочки переднего 9 и заднего 12 валов. Натяжение транспортера осуществляется перемещением заднего вала при помощи натяжных винтов. Транспортер приводится в действие от электродвигателя 7 и ведущую звездочку, установленную на переднем валу.
Для загрузки кормов на горизонтальном транспортере смонтирован загрузочный лоток 11 размером 1,2х0,4 м. Из горизонтального транспортера корм перегружается в горизонтально-наклонный через выгрузной лоток 8 размером 0,6х0,4 м. Загрузочная высота (высота горловины загрузочного лотка от земли) составляет 0,6 м.
Горизонтально-наклонный транспортер, помимо желобов различной длины, имеет колено 5, обеспечивающее подъем транспортера вверх под углом 30°, загрузочный лоток 21, по размерам немного больший, чем выгрузной лоток 22. привод осуществляется от электродвигателя через цепную передачу 2 и приводную звездочку 3. Оба электродвигателя соединены в одну электрическую схему.
Для защиты от токов короткого замыкания и перегрузок установлены магнитные пускатели с тепловым реле. Управление транспортерами ведется с пульта.
Транспортер ТКС-6 выполняет работу в следующем порядке. Из разгрузчика сенажных башен корм поступает в загрузочный лоток горизонтального транспортера и далее передвигается цепочно-планчатым транспортером в выгружной лоток, из него подается в приемный лоток горизонтально-наклонного транспортера, а затем цепочно-планчатым скребковым транспортером через колено направляется вверх и выгружается через выгружной лоток. Нормальная эксплуатация обеспечивается при загрузке не более 3,5 кг массы на 1 метр транспортера.
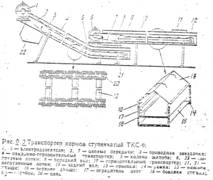
Таблица 1. Технологические параметры транспортера.
| Производительность, т/ч | 4,45 |
| Транспортирующий рабочий органы: Длина транспортера, м Скорость движения транспортера, м/с Габаритные размеры, мм Масса, кг | 42,5 0,35 42500х470х560 1750 |
При перемещении грузов скребковым транспортером мощность расходуется на преодоление трения груза о дно и стенки желоба, перемещение груза и тягового рабочего органа в горизонтальном и вертикальном направлениях, трение в элементах рабочего органа, звездочках, подшипниках.
Потребляемая мощность электродвигателя привода транспортера определяется по следующей формуле:
![]()
(1)
гдеWc – производительность транспортера, т/ч;
Lс – расстояние между центрами валом приводных и натяжных звездочек, м, принимаем равным длине транспортера;
wс – обобщенный коэффициент сопротивления перемещению скребка, wс = 0.8…0.9;
νс – скорость движения рабочего органа, м/с;
qс – масса одного метра рабочего органа, кг, qс =2.8 кг/м;
hп – КПД передаточного механизма, hп = 0.7...0.85;
kп – коэффициент, учитывающий сопротивление от перегибов цепи и трения в подшипниках, kп = 1.15;
kз – коэффициент запаса мощности, kз = 1.1...1.3.
В итоге, имеем:

1.3. Расчет и построение механических характеристик и нагрузочных диаграмм рабочих машин.
Приведенный момент сопротивления машины при номинальной частоте вращения определяется по следующей формуле:
![]()
(2)
Подставляя числовые значения в формулу (2) получаем:
![]()
Для построения механической характеристики воспользуемся общей формулой:
![]() (3)
(3)
где Mс – момент сопротивления механизма при любой частоте вращения, Н.м;
Mсо – начальный момент сопротивления, Н.м;
x – показатель степени, характеризующий изменение момента при изменении частоты вращения;
y – угловая скорость вращения, выраженная в относительных единицах, y = w/wн;
Показатель степени x для транспортеров x = 0, следовательно:
![]()
Механическая характеристика Mc = f(w) будет иметь следующий вид:
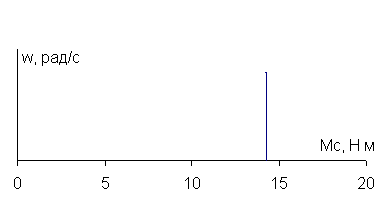
Рис.2. Механическая характеристика рабочей машины
Механическая характеристика рабочей машины приведена на листе 1 графической части.
Для построения нагрузочной диаграммы определяем время заполнения погрузчика:
![]()
где l – длина транспортера, м;
υ – скорость движения корма, м/с.
![]()
Время освобождения транспортера примем равным времени заполнения.
Время работы двигателя определяется количеством корма для кормления, либо величины емкости-накопителя. Для нашего случая принимаем время работы транспортера, равным 1 часу или 3600 секундам.
Принимаем мощность холостого хода Pxx равной:
![]()
Нагрузочная диаграмма изображена на листе 1 графической части.
Похожие работы
... току электроприемника, А: Выбор автоматического выключателя: 380=380 B Uн=380В, Iдл=14,56А, Iн= 16 А, Выбираем автоматический выключатель AE2026. Выбор типа защитного аппарата электропривода транспортера приводим по критерию эффективности: ; где - вероятность отказа данного электродвигателя i-го механизма по y причине; - вероятность срабатывания к-го устройства защиты при ...
... молока. Для доильной установки АДМ-8 рекомендуется применять танки-охладители ТОВ-1 или ТО2 и поэтому выбираем танк охладитель ТО-2 емкостью 2000л, предназначенный для хранения молока на фермах с поголовьем 200 коров. Может работать с доильными установками всех типов. Состоит из емкости прямоугольной формы с двойными стенками, наклонным днищем в сторону сливного крана, фильтра молока, мешалки с ...
... внутренние самонесущие стены, опирающиеся на перекрытия и разделяющие пространство этажа здания на отдельные помещения. Полы. Основанием под полы в одноэтажных промышленных зданиях служит грунт, исключающий неравномерную осадку пола и обладающий достаточной прочностью. С грунта снимается растительный слой. Конструкция химически стойкого пола включает следующие элементы: бетонное основание (по ...
... освещение Освещение в рыбоперерабатывающем цехе осуществляется искусственным и естественным способами. Освещение должно удовлетворять требованиям СНиП 23.0 – 95 «Естественное искусственное освещение. Нормы проектирования». Естественное освещение осуществляется через оконные проемы в стенах цеха. В производственных помещениях предусмотрено общее рабочее освещение. Сеть общего производственного ...
0 комментариев