Навигация
Разработка системы оптимального управления
10217
знаков
0
таблиц
13
изображений
1.3 Разработка системы оптимального управления
Не учитывая насыщение магнитопровода можно записать
![]() (32)
(32)
т.е. регулирования потока предполагает необходимость поддержания требуемого соотношения ![]() .
.
В соответствии с (27) поток ![]() определяется моментом
определяется моментом ![]() на валу АД
на валу АД
![]() . (33)
. (33)
После подстановки (3.2) в (2.14) получаем, что
 , (34)
, (34)
где ![]() – показатель, зависящий от марки электротехнической стали.
– показатель, зависящий от марки электротехнической стали.
Из векторной диаграммы (рис.) видно, что
![]() .
.
С учетом этих соотношений структурная схема электропривода, приведенная на рис 1 содержит асинхронный двигатель (АД), преобразователь частоты (ПЧ), датчики тока (ДТ) и напряжения статора (ДН), регулятор напряжения (РН) и вычислительное устройство (ВУ). В нем по мгновенным значениям ![]() и
и ![]() вычисляется ток
вычисляется ток ![]() , затем с учетом частоты
, затем с учетом частоты ![]() определяется поток
определяется поток ![]() . Значение напряжения
. Значение напряжения ![]() , необходимое для создания этого потока, рассчитывается в соответствии с рис. 1 следующим образом:
, необходимое для создания этого потока, рассчитывается в соответствии с рис. 1 следующим образом:
![]() , (35)
, (35)
где
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Регулятор напряжения, сравнивая оптимальное ![]() и текущее
и текущее ![]() значения напряжения, воздействует на преобразователь частоты таким образом, чтобы обеспечить их равенство и получить требуемое значение
значения напряжения, воздействует на преобразователь частоты таким образом, чтобы обеспечить их равенство и получить требуемое значение ![]() .
.
На рис. 2 показана структурная схема электропривода с регулятором потока (РП), воздействующим на канал регулирования напряжения ПЧ. В этой структурной схеме должен использоваться АД со встроенным датчиком потока. В качестве датчиков потока обычно используют специальные дополнительные обмотки на статоре или датчики Холла. Приведенная структурная схема исключает погрешность, связанную с необходимостью вычисления напряжения по (35).
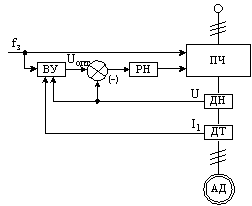
Рисунок 1 Функциональная схема частотно управляемого асинхронного электропривода с регулятором напряжения
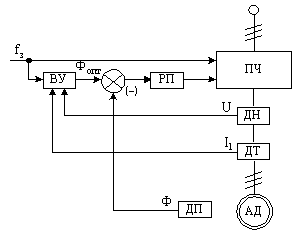
Рисунок 2 Функциональная схема частотно управляемого асинхронного электропривода с регулятором потока
Как и в структурной схеме электропривода постоянного тока, структурная схема электропривода ПЧ-АД существенно упрощается, если момент на валу АД является однозначной функцией скорости (рис). В этом случае поток ![]() и соответственно напряжение
и соответственно напряжение ![]() определяются только угловой скоростью
определяются только угловой скоростью ![]() и частотой
и частотой ![]() .
.
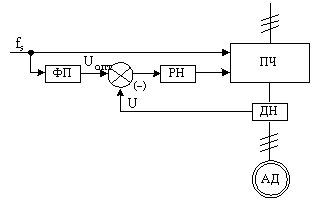
Рисунок 3. Функциональная схема асинхронного электропривода с преобразователем частоты для механизма с вентиляторным моментом сопротивления
В рассматриваемой системе электропривода момент сопротивления АД определяется следующим образом:
 (36)
(36)
Принимая начальный момент сопротивления ![]() равным нулю получим:
равным нулю получим:
или ![]()
Если принять во внимание, что ![]() , тогда оптимальный поток, необходимый для уменьшения потерь определяется следующим выражением:
, тогда оптимальный поток, необходимый для уменьшения потерь определяется следующим выражением:
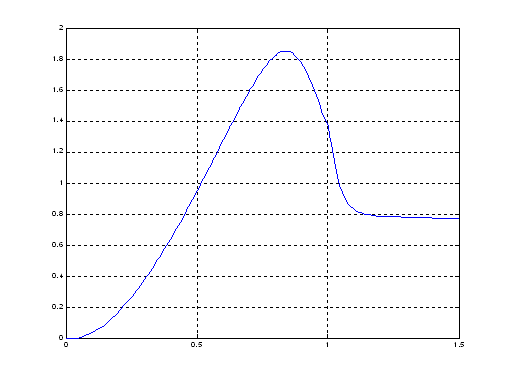
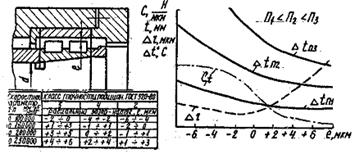
Функциональный преобразователь в схеме устанавливает требуемую взаимосвязь между ![]() и
и ![]() . Примерный вид зависимостей
. Примерный вид зависимостей ![]() и
и ![]() для
для ![]() показан на рис.
показан на рис.
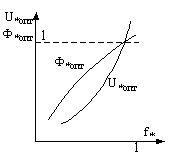
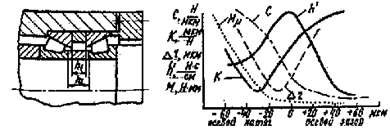
Рисунок 4. Зависимости оптимального потока и напряжения от частоты
Укажем одну из важных особенностей энергетической оптимизации АД при частотном управлении. Одна связана с принципиальной необходимостью учета нелинейности кривой намагничивания.
В асинхронных ЭП с частотным управлением поток пропорционален ![]() . В ПЧ осуществляется независимое управление частотой и амплитудой напряжения, приложенного к статору АД, поэтому имеется возможность работать при пониженных частотах с большими значениями потока, существенно превышающими номинальное значение. В то же время можно доказать, что для минимизации потерь при малых частотах необходимо увеличивать поток по сравнению с номинальным значением, т. е. АД должен работать на нелинейном участке кривой намагничивания. Учет кривой намагничивания существенно усложняет анализ условий существования минимума электрических потерь, поэтому здесь не приводится.
. В ПЧ осуществляется независимое управление частотой и амплитудой напряжения, приложенного к статору АД, поэтому имеется возможность работать при пониженных частотах с большими значениями потока, существенно превышающими номинальное значение. В то же время можно доказать, что для минимизации потерь при малых частотах необходимо увеличивать поток по сравнению с номинальным значением, т. е. АД должен работать на нелинейном участке кривой намагничивания. Учет кривой намагничивания существенно усложняет анализ условий существования минимума электрических потерь, поэтому здесь не приводится.
1.4 Анализ динамических режимов
Для моделирования системы ПЧ-АД и исследования ее свойств воспользуемся линеаризованной моделью АД, представленной на рис. 3
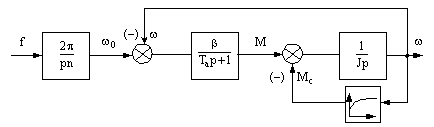
Рисунок 5 Линеаризованная модель системы ПЧ-АД
Рассчитаем необходимые параметры модели
Абсолютная тестность механической характеристики


Электромагнитная постоянная времени

Для расчетных параметров были составлены математические модели системы ПЧ-АД с законом управления ![]() (рис 4) и законом оптимального управления потоком (рис5). В качестве регулятора напряжения принят пропорциональный регулятор. Как будет показано далее, такой выбор удовлетворяет поставленным условиям и не требует сложных технических решений при его реализации.
(рис 4) и законом оптимального управления потоком (рис5). В качестве регулятора напряжения принят пропорциональный регулятор. Как будет показано далее, такой выбор удовлетворяет поставленным условиям и не требует сложных технических решений при его реализации.
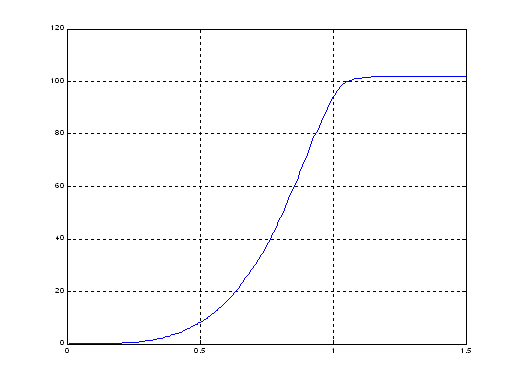
На рис. 6 представлены графики напряжения и потока в относительных единицах в системе оптимального управления при пуске.
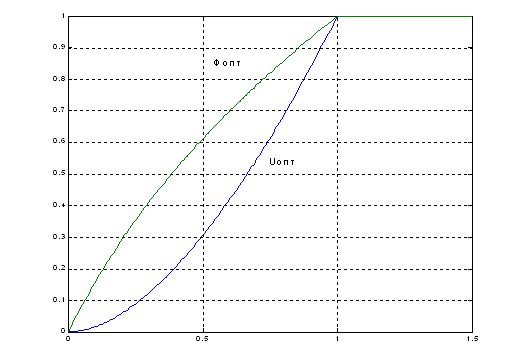
Рисунок 6 Зависимости оптимального изменения потока и напряжения
Как видно характер изменения совпадает с рис 1.
На рис 7 приведены зависимости изменения от времени тока ротора и скорости для разомкнутой системы и системы оптимального управления.
Анализируя полученные зависимости можно отметить исходный характер пускового тока для обоих систем, однако в установившемся режиме работы ток в роторе ![]() для оптимальной системы управления
для оптимальной системы управления ![]() 20 % ниже чем 6 разомкнутой.
20 % ниже чем 6 разомкнутой.
Потери при пуске АД определяются по формуле
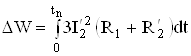
Используя метод трапеций по данным, полученным в процессе моделирования в пакете MATLAB определены численные значения интегралов данных функций
а) в системе оптимального по минимуму потерь управления

б) в разомкнутой системе
Рисунок 7. Зависимости скорости от времени
а) в системе оптимального по минимуму потерь управления

б) в разомкнутой системе
Рисунок 8. Зависимости тока ротора от времени
![]()
![]()
Выразим теперь в относительных единицах переменные потери в АД под уравнения:
![]()
![]()
В связи с тем, что ток есть квадратная функция в системе оптимального управления переменные потери снижаются приблизительно на 40 %.
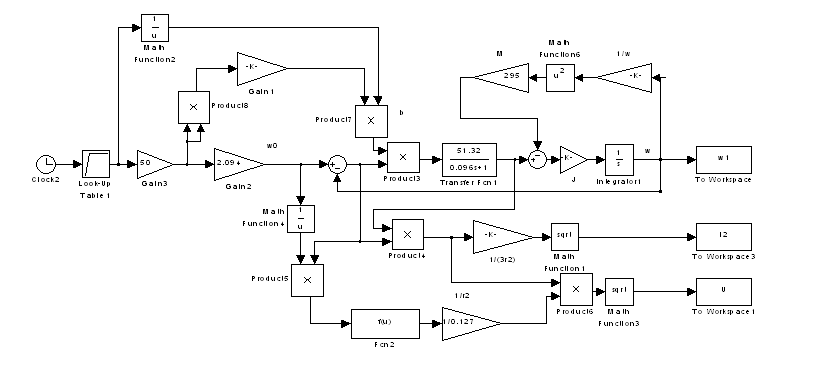
Рисунок 9. Разомкнутая система ПЧ-АД с законом управления ![]()
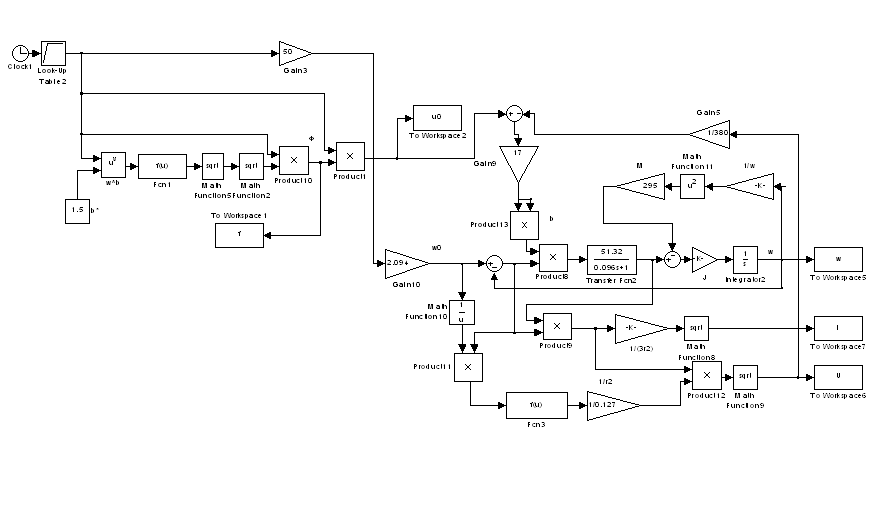
Рисунок 10. Система оптимального по минимуму потерь управления частотно регулируемого электропривода
Похожие работы
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...
... за собой её гибель, либо требующие подключения к процессу самоуправления суперсистемы иерархически высшего управления. Так соборный интеллект видится индивидуальному интеллекту с точки зрения достаточно общей теории управления; возможно, что кому-то всё это, высказанное о соборных интеллектах, представляется бредом, но обратитесь тогда к любому специалисту по вычислительной технике: примитивная ...
0 комментариев