Системы управления автоматизированным технологическим оборудованием
Важнейшей частью любого автомата являются система и механизмы управления. Одним из важнейших определяющих признаков современных АТО обработки и сборки электронных компонентов является тип системы управления, которая реализует заданною программу работы, координирует работу всех механизмов и устройств АТО в течение рабочего цикла и выполняет ряд дополнительных функций.
Общие сведения о программном управлении станками
Повышение производительности и качества работ на металлорежущих станках связано с механизацией и автоматизацией цикла обработки и заготовки.
Под управляющей программой понимают совокупность команд на языке программирования, соответствующую заданному алгоритму функционирования станка по обработке конкретной заготовки.
В зависимости от способа задания размерной информации все системы управления станками разделяют на аналоговые (нечисловые) и числовые. Аналоговые системы управления преобразуют исходную информацию, заложенную в программоноситель в процессе подготовки производства. Программоносителями могут быть: упоры, расположенные определенным образом на станке, копиры, кулачки и распределительные валы. Исполнительные органы станка, по исходной информации, представленной в виде аналога программы перемещений, воспроизводят данную программу обработки заготовки.
Аналоговые системы управления классифицируют на следующие типы: замкнутые, незамкнутые, копировальные со следящим приводом.
Системы управления замкнутого типа осуществляют контроль исполнительного органа станка по пути (путевые), времени (временные), скорости, мощности, давлению и другим параметрам.
Системы управления с приводом от копира, кулачка, храпового механизма и другие, осуществляющие дозированное перемещение исполнительных органов станка, а также системы без усилителя мощности (копировальные прямого действия) относят к незамкнутым.
Широкое применение в станках различных типов нашли копировальные системы со следящим приводом (гидравлическим, электрогидравлическим или электрическим). Эти системы имеют обратную механическую или электрическую связь.
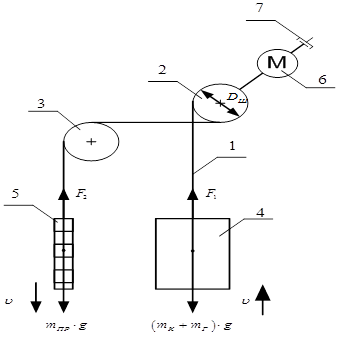
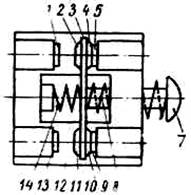
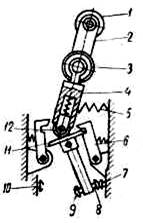
В качестве примера рассмотрим работу копировальной системы управления с гидравлическим следящим приводом, имеющим механическую обратную связь (рис. 1), используемую на токарном станке для изготовления из заготовки 4 фасонной детали 5 по копиру 8. Гидронасос, при работе системы, подает масло под давлением РН в правую полость гидроцилиндра 1, а левая полость его соединена со сливным трубопроводом Pc. В результате разности давлений поршень гидроцилиндра 1 со штоком начнет движение по оси Z, увлекая за собой шток следящего гидропривода 2. Дросселирующий гидрораспределитель 7 соединен с напорным РН и сливным Рс трубопроводами. Продольное движение (по оси Z) щупа 9 по копиру 8 вызывает перемещение гидрораспределителя 7 относительно корпуса, в котором он размещен. Отрыв щупа 9 от рабочей поверхности копира 8 исключает пружина 6 гидрораспределителя. В результате перемещения гидрораспределителя относительно корпуса следящего гидропривода 2 открываются дросселирующие щели, образованные корпусом и гидрораспределителем. Полости А и Б гидроцилиндра соединяются соответственно с напорным и сливным трубопроводами. Перепад давления на поршне следящего гидропривода 2 вызывает перемещение корпуса привода за дросселирующим гидрораспределителем 7, т. е. происходит слежение за перемещением щупа по копиру. Перемещение корпуса гидропривода 2 передается резцу 3, жестко связанному с корпусом.
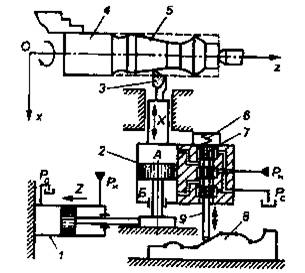
Рис. 1. Система управления копировальная с гидравлическим следящим приводом и механической обратной связью: 1 — гидроциллиндр; 2 — гидропривод; 3 — резец; 4 — заготовка; 5 — фасонная часть детали; 6 — пружина; 7 — гидрораспределитель; 8 — копир; 9— щуп
Таким образом резец 3 получает продольное перемещение (по оси Z) от гидроцилиндра 1, а поперечное перемещение (по оси X) — от корпуса гидропривода 2.
Копировальные системы широко применяют для управления обработкой детали по одной, двум и трем координатам. Возможность быстрой смены программоносителя (копира) позволяет использовать их в условиях серийного производства.
Аналоговые системы управления позволяют повысить производительность механической обработки, но не обладают достаточной гибкостью. Это обусловливает высокую стоимость переналадки оборудования.
Эволюция технологии числового программного управления происходила в тесной связи с развитием вычислительной техники и зависела от него. Без автоматизации программирования систем ЧПУ с помощью ЭВМ было бы невозможно составлять управляющие программы для обработки многих видов деталей. Кроме того, ЭВМ позволяют совершенствовать и облегчать процедуру программирования СЧПУ с использованием таких методов, как интерактивная машинная графика и речевой ввод программ.
1. ЧПУ от ЭВМ, или машинное числовое программное управление (МЧПУ).
2. Прямое цифровое управление (ПЦУ).
3. Адаптивное управление (АУ).
В системах ЧПУ от ЭВМ, или МЧПУ, традиционные управляющие устройства, реализованные на базе не перестраиваемой («жестко запаянной») аппаратуры, заменяются малой (мини- или микро-) ЭВМ. Эта малая ЭВМ используется для выполнения ряда основных функций ЧПУ с помощью программ, хранящихся в ее оперативной памяти. Одним из отличительных свойств МЧПУ является то, что здесь один станок управляется одной ЭВМ.
В отличие от этого при другом типе управления от ЭВМ -прямом цифровом управлении (ПЦУ) - одна большая ЭВМ используется для управления несколькими отдельными станками с ЧПУ.
Третий тип управления - адаптивное управление - не требует для своей реализации использования дополнительной цифровой вычислительной машины. Механическая обработка с адаптивным управлением предусматривает измерение управляющей системой одной или большего числа переменных, характеризующих процесс обработки (например, усилия резания, температуры, потребляемой мощности и т.д.), и соответствующее изменение скоростей подачи и (или) резания для компенсации нежелательных отклонений переменных управляемого процесса. Цель такого режима состоит в оптимизации процесса обработки, чего сама по себе СЧПУ обеспечить не в состоянии. Многие ранние проекты систем адаптивного управления базировались на аналоговых управляющих устройствах. Современные системы такого типа используют микропроцессорную.
Технические средства ЧПУ
Технология создания аппаратных средств ЧПУ с годами претерпела радикальные изменения. Можно выделить по меньшей мере семь поколений аппаратуры управляющих устройств:
1. Электронные лампы (около 1952 г.).
2. Электромеханические реле (около 1955 г.).
3. Дискретные полупроводниковые элементы (около 1960 г.).
4. Интегральные схемы (около 1965 г.).
5. Прямое цифровое управление (около 1968 г.).
6. ЧПУ от ЭВМ (около 1970 г.).
7. Микропроцессоры и микро-ЭВМ (около 1975 г.).
Числовое программное управление для автоматизированного оборудованияТермины и определения основных понятий в области числового программного управления металлорежущим оборудованием устанавливает ГОСТ 20523-80.
Числовое программное управление станком (ЧПУ) — управление обработкой заготовки на станке по управляющей программе, в которой данные заданы в цифровой форме.
Устройство, выдающее управляющие воздействия на исполнительные органы станка в соответствии с управляющей программой и информацией о состоянии управляемого объекта, называют устройством числового программного управлении (УЧПУ).
|
|
|
|
Различают аппаратное и программируемое УЧПУ. В аппаратном (NC) устройстве алгоритмы работы реализуются схемным путем и не могут быть изменены после изготовления устройства. Эти устройства выпускают для различных групп станков: токарных («Контур-2ПТ», Н22), фрезерных («Контур-ЗП», НЗЗ), координатно-расточных («Размер-2М», ПЗЗ) и т. д. Такие УЧПУ изготовляют с вводом управляющей программы на перфоленте. В программируемых устройствах (CNC) алгоритмы реализуются с помощью программ, вводимых в память устройства и могут быть изменены после изготовления устройства. Устройства УЧПУ типа CNC включает малую ЭВМ, оперативную память и внешний интерфейс.
Система числового программного управления (СЧПУ) представляет собой совокупность функционально взаимосвязанных и взаимодействующих технических и программных средств, обеспечивающих ЧПУ станком.
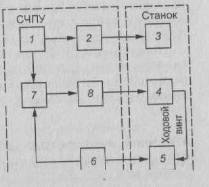
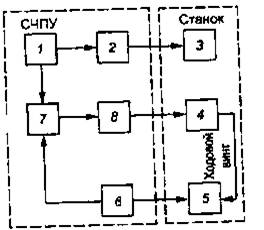
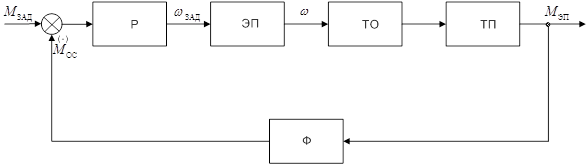
Основной функцией СЧПУ является управление приводами подач станков в соответствии с заданной программой, а дополнительными — смена инструмента и т. д. На рис. 111 представлена обобщенная структурная схема СЧПУ. Схема работает следующим образом: устройство 1 ввода программы преобразовывает ее в электрические сигналы и направляет в устройство 7 отработки программы, которое через устройство 8 управления приводом воздействует на объект регулирования — привод 4 подач. Подвижную часть станка, связанную с приводом 4 подач, контролирует датчик 5, включенный в цепь главной обратной связи.
|
|
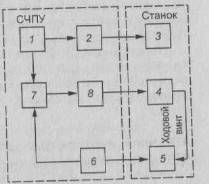
С датчика 5 через устройство 6 обратной связи информация поступает в устройство 7 отработки программы. Здесь происходит сравнение фактического перемещения с заданным по программе для внесения соответствующих коррективов в производимые перемещения. С устройства 1 электрические сигналы также поступают в устройство 2 для реализации дополнительных функций.
Устройство 2 воздействует на исполнительные элементы 3 технологических команд (двигатели, электромагниты, электромагнитные муфты и др.), при этом исполнительные элементы включаются или выключаются. Достоинство станков с ЧПУ — быстрое переналаживание без смены или перестановки механических элементов. Нужно только изменить вводимую в станок информацию и он начнет работать по другой программе, т. е. обрабатывать другую заготовку (деталь). Высокая универсальность станков с ЧПУ удобна в тех случаях, когда нужен быстрый переход на изготовление другой детали, обработка которой на обычных станках требует использования специальной оснастки.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2. Обобщенная структурная схема СЧПУ: 1 – устройство ввода программы; 2 – устройство реализации дополнительных функций; 3 – исполнительные элементы; 4 – привод подач; 5- датчик; 6 – устройство обратной связи; 7 – устройство обработки программы; 8 – устройство управления приводом
Точность размеров и формы обрабатываемой детали, а также требуемый параметр шероховатости поверхности обеспечиваются жесткостью и точностью станка, дискретностью и стабильностью позиционирования и ввода коррекции, а также качеством СЧПУ.
Конструктивно системы ЧПУ бывают разомкнутыми, замкнутыми и самонастраивающимися; по виду управления движением — позиционными, прямоугольными, непрерывными (контурными).
Системы ЧПУ разомкнутого вида используют один поток информации. Программу считывает устройство, в результате чего на выходе последнего появляются командные сигналы, которые после преобразования направляют к механизму осуществляющему перемещение исполнительных органов станка (например, суппортов). Контроль соответствия действительного перемещения заданному отсутствует.
В замкнутых СЧПУ для обратной связи используются два потока информации. Один поток поступает от считывающего устройства, а второй — от устройства, измеряющего действительные перемещения суппортов, кареток или других исполнительных органов станка.
У самонастраивающихся систем (CNC) информация, поступающая от считывающего устройства корректируется с учетом поступающих из блока памяти сведений о результатах обработки предыдущей заготовки. За счет этого повышается точность обработки, так как изменения условий работы запоминаются и обобщаются в устройствах самонастройки памяти станка, а затем преобразуются в управляющий сигнал. От простых СЧПУ CNC отличается автоматической приспособляемостью процесса обработки заготовки к изменяющимся условиям обработки (по определенным критериям) для лучшего использования возможностей станка и инструмента. Станки с простой СЧПУ отрабатывают программу без учета действия случайных факторов, например припуска, твердости обрабатываемого материала и состояния режущих кромок инструмента. CNC, в зависимости от поставленной задачи и методов ее решения разделяют на системы регулирования какого-либо параметра (например, скорости резания и т. д.) и системы, обеспечивающие поддержание наибольшего значения одного или нескольких параметров.
Системы ЧПУ, обеспечивающие точную установку исполнительного механизма в заданное положение, называют позиционными. Исполнительный орган в этом случае в определенной последовательности обходит заданные координаты по осям Х и У (рис. 3, а). При этом сначала выполняется установка (позиционирование) исполнительного органа в точке с заданными координатами, а затем — наработка. Разновидностью позиционных СЧПУ являются прямоугольные СЧПУ, в которых программируются не точки, а отдельные у и резки, но при этом продольная и поперечная подачи разделены во времени.
Системы ЧПУ (рис. 3, 6) обеспечивающие последовательное иключение продольной и поперечной подач станка при обработке поверхности ступенчатой формы, называют прямоугольными. Эти СЧПУ используют в токарных, карусельных, револьверных, фрезерных и других станках. Обработку ступенчатых валов и других деталей с прямоугольными контурами выполняют только по траектории, параллельным направлению перемещений рабочих органов.
Системы ЧПУ (рис. 3, в), обеспечивающие непрерывное управление рабочими органами в соответствии с заданными законами изменения их пути и скорости перемещения для получения необходимого контура обработки, называют контурными. При этом инструмент движется относительно заготовки по криволинейной траектории, которая получается в результате сложения движений по двум (плоская криволинейная траектория) или трем (пространственная криволинейная траектория) прямолинейным координатам. Такие СЧПУ применяют в токарных и фрезерных станках при изготовлении деталей с фасонными поверхностями. Подача s инструмента в каждый момент обработки складывается из поперечной S![]() и продольной
и продольной ![]() подач. Следовательно, перемещения инструмента по различным координатным осям функционально связаны друг с другом.
подач. Следовательно, перемещения инструмента по различным координатным осям функционально связаны друг с другом.
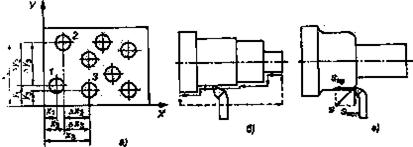
Рис. 3. Виды обработки при использовании позиционных (а), прямоугольных (б) и контурных (в) СЧПУ: 1, 2, 3 — номера обрабатываемых отверстий; ![]() и
и ![]() — координаты отверстий по осям X и Y;
— координаты отверстий по осям X и Y; ![]() — приращения координат;
— приращения координат; ![]() и S
и S![]() — продольная и поперечная подачи
— продольная и поперечная подачи
Система МЧПУ использует в монопольном режиме ЭВМ с записанной в нее программой для выполнения некоторых или всех основных функций числового программного управления. На протяжении ряда лет в устройствах МЧПУ применялись также мини-ЭВМ.
По внешнему виду станок с МЧПУ очень похож на обычный станок с ЧПУ.

Рис. 4. Общая конфигурация системы машинного числового программного управления (МЧПУ).
Управляющая программа обработки детали вначале вводится аналогичным образом. По сравнению с обычными СЧПУ системы МЧПУ обладают большей гибкостью и повышенными вычислительными возможностями. Новые варианты функционирования системы можно ввести в устройство МЧПУ, просто заменив программу его работы. Благодаря возможности перепрограммирования (это касается как управляющих программ обработки деталей, так и вариантов управления системой) МЧПУ часто называют гибко-программируемым ЧПУ. Общая конфигурация системы МЧПУ показана на рис. 4.
Функции МЧПУ
Система МЧПУ предназначена для выполнения целого ряда функций. Основными функциями МЧПУ являются следующие:
1. Управление станком.
2. Компенсация отклонений в процессе обработки деталей.
3. Обеспечение повышенных возможностей в режимах программирования и работы.
Диагностика
Управление станком. Главной функцией системы МЧПУ является управление работой станка. Это предполагает преобразование команд управляющей программы обработки детали в соответствующие движения инструмента, реализуемое посредством сервосистемы, которая связана с ЭВМ интерфейсом. Возможность удобно вводить множество различных функций управления в такой программируемый контроллер является главным преимуществом МЧПУ.
В гибридной системе машинного числового программного управления, показанной схематично на рис. 5, в состав управляющего устройства входят перепрограммируемая часть (ЭВМ) и «жестко запаянные» логические схемы, реализованные аппаратно. Аппаратные компоненты выполняют те функции, которые у них получаются лучше (например, формирование скорости подачи и круговую интерполяцию). На ЭВМ возлагаются остальные функции управления плюс другие обязанности, которые обычно не связывают с традиционными «жестко запаянными» контроллерами. В гибридной системе МЧПУ можно обойтись более дешевой ЭВМ.
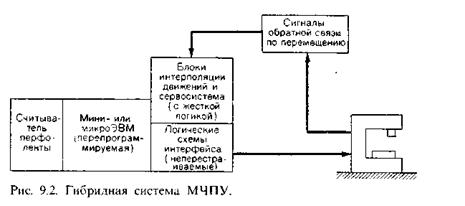
Рис 5 Гибридная система МЧПУ
Разработано две альтернативные конфигурации устройств МЧПУ:
1. Гибридные системы МЧПУ.
2. Прямые системы МЧПУ.

Рис. 6. Система непосредственного числового программного управления (НЧПУ).
При прямой конфигурации системы МЧПУ ЭВМ используется для выполнения всех функций числового программного управления. Аппаратно реализуются только элементы интерфейса, связывающего ЭВМ со станком и с пультом оператора. Интерполяция, обратная связь по положению инструмента и все другие функции осуществляются программными средствами ЭВМ. В соответствии с этим в прямой системе МЧПУ требуется более мощная ЭВМ, чем в гибридной. Преимущество прямой конфигурации МЧПУ заключается в дополнительной гибкости. Здесь имеется возможность вносить изменения в программы интерполяции, тогда как логику, «запаянную» в аппаратные схемы гибридных систем, нельзя перестроить. Схема построения прямой системы МЧПУ показана на рис. 6.
Компенсация отклонений в процессе обработки деталей. Функция тесно связана с управлением станком. Это предусматривает динамическую коррекцию движений станка, компенсирующую изменения или ошибки, которые происходят во время обработки детали.
Обеспечение повышенных возможностей в режимах программирования и работы. Гибкость программно перестраиваемых управляющих устройств позволила обеспечить много удобных возможностей при программировании системы и при обработке деталей.
Диагностика. Станки с ЧПУ-это сложные и дорогие системы. В идеале подсистема диагностики должна выполнять несколько функций. Во-первых, она должна уметь выявлять причину простоя, чтобы обслуживающий персонал мог быстрее произвести ремонт. Во-вторых, диагностическая подсистема должна чутко реагировать на признаки, предвещающие приближающийся отказ того или иного элемента. Это позволит обслуживающему персоналу своевременно заменить дефектный элемент при запланированной профилактике, что предотвратит непредвиденную остановку производства. Третья возможная функция связана с тем, что системы МЧПУ могут содержать определенное количество избыточных элементов из числа тех, которые считаются ненадежными. При отказе одного из таких элементов подсистема диагностики автоматически отключит его и задействует однотипный элемент из резерва.
Список литературы
1. Автоматизированная подготовка программ для станков с чпу, (Справочник)/ Р.Э. Сафраган, Г.Б. Евгенев, А.Л. Дерябин и др.; Под общей ред. Р.Э. Сафрагана. - К.: Техника, 1986. – 191 с.
2. Р.И. Гжиров, П.П. Серебреницкий. Программирование обработки на станках с чпу. Справочник, - Л.: Машиностроение, 1990. – 592 с.
Похожие работы
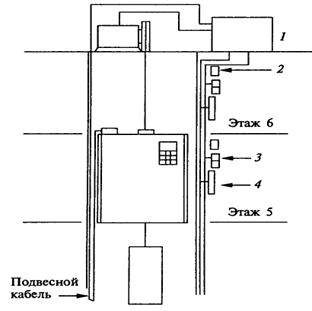
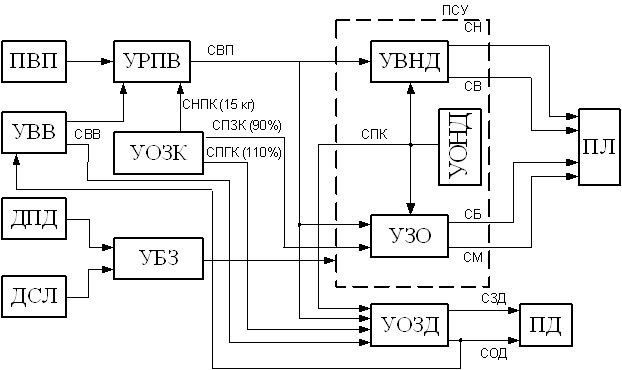
... кабины. Рисунок 4 – Функциональная структура управления 2.3 Определение уровней управления ТП и архитектуры верхнего уровня АСУ Для управления технологическим процессом передвижения пассажирского лифта необходимо наличие трёх уровней управления. Верхний уровень В последнее время наблюдается тенденция к оснащению зданий сложным инженерным и коммуникационным оборудованием. Появляется ...
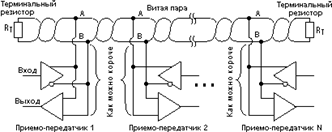

... 4. Сетевая структура 5. аппаратура верхнего уровня системы: функции и характеристики 6. ПО верхнего уровня и его основные задачи 7. Пример мнемосхемы 5. Автоматизированная система управления взрывоопасным технологическим процессом Введение Наше предприятие налаживает производство статоров для газовых центрифуг. Одним из звеньев технологического цикла изготовления статора является ...
... постоянного тока применяют обычно в тех случаях, когда необходимо регулировать число оборотов. В качестве привода для небольших поступательных перемещений элементов механизмов автоматического управления используют электромагниты, например для перемещения гидравлических и пневматических золотников, включения тормозов и муфт. Обычно принимают электромагниты переменного тока, которые изготовляют ...
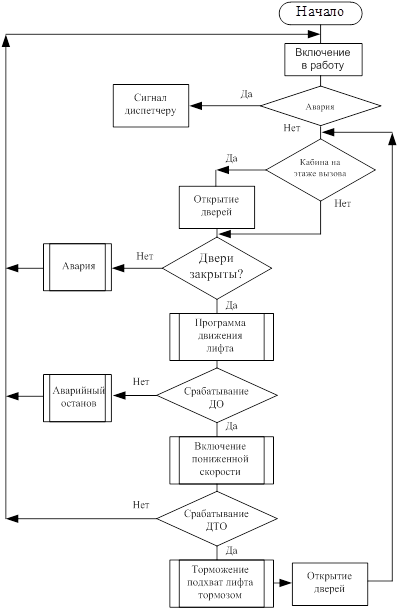
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
0 комментариев