Анализ технологического процесса как объекта управления
Классификация и перечень технологических переменных анализ взаимодействия между технологическими процессами
Разработка и выбор элементов АСУ ТП
Функциональная структура системы управления ТП описание функциональных блоков системы
Математическое моделирование системы управления технологическим процессом
Структура и параметрический синтез регуляторов системы управления ТП
Навигация
Автоматическая система управления процессом передвижения пассажирского лифта
Автоматическая система управления процессом передвижения пассажирского лифта
48573
знака
1
таблица
19
изображений
Курсовой проект
по дисциплине
«Комплексная автоматизация технологических процессов»
Автоматическая система управления процессом передвижения пассажирского лифта
2009
План
Введение краткий обзор существующих автоматизированных ситема управления (в том числе патентная информация) глубина патентной информации 5 лет. 4
1. Анализ технологического процесса как объекта управления. 8
1.1 Описание технологического процесса технологического оборудования. 8
1.2 Технологические схемы процесса и оборудования. 10
1.3. Классификация и перечень технологических переменных анализ взаимодействия между технологическими процессами. 12
1.4. Классификация и перечень измеряемых переменных состояния, определение требуемой точности измерения переменных технологического процесса. Определение условий работы измерительных устройств. 13
1.5 Классификация и перечень управляющих воздействий определение требуемой точности управления ТП. Определение условий работы силовых регулирующих устройств. 14
1.6 Определение основных требований к ведению технологического процесса, формулирование критерия качества и цели управления. 14
2. Разработка и выбор элементов АСУ ТП. 17
2.1 Разработка общих алгоритмов функционирования АСУ технологическим процессом. Блок схемы алгоритмов и их описания. 17
2.2 Функциональная структура системы управления ТП описание функциональных блоков системы. 21
2.3 Определение уровней управления ТП и архитектуры верхнего уровня АСУ. 22
2.4 Блок схемы аппаратных средств уровней системы. Выбор аппаратных средств на всех уровнях управления. Вариант принципиальной схемы соединения между аппаратными блоками системы. 25
2.5 Выбор общего и специального программного обеспечения на всех уровнях АСУ ТП. 26
2.6 Принципы обмена информацией между уровнями системы. Выбор интерфейсных устройств и протоколов обмена. 26
3. Математическое моделирование системы управления технологическим процессом. 27
3.1 Выбор среды моделирования и разработка математической модели технологического процесса и технологического оборудования с исполнительными электроприводами. 27
3.2 Структура и параметрический синтез регуляторов системы управления ТП. 35
3.3 Компьютерное моделирование алгоритмов управления. Графическое представление результатов моделирования. 43
Заключение. 46
Литература. 47
Введение краткий обзор существующих автоматизированных ситема управления (в том числе патентная информация) глубина патентной информации 5 лет
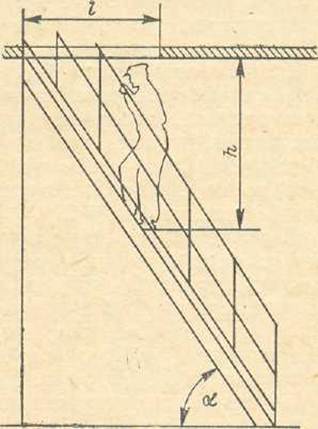
Сегодня уже трудно представить себе российский город без работающего вертикального транспорта. Для огромного количества людей нормальная работа лифтового хозяйства является синонимом нормальной жизни. Качественная работа лифтов и подъемных механизмов и их надежность остается одним из ключевых аспектов в деле обеспечения безопасности жилых и общественных зданий, поэтому необходимо непрерывное развитие и модернизация лифтового оборудования.
Лифт – механизм вертикального транспорта, предназначенный для транспортировки пассажиров и грузов в жилых и производственных помещениях. Широкое распростронение использования лифтового электропривода в промышленности и в повседневной жизни, определяет лифт как наиболее распространненый вид вертикального транспорта.
Наблюдаемая в последнее время тенденция к повышению этажности зданий в городах, а также к комфорту передвижения в лифтах ведёт к усложнению систем управления процессом передвижения. Благодаря развитию современных микропроцессорных систем управления данные задачи успешно решаются в настоящее время.
Современный лифт – это сложное электромеханическое устройство, работающее в полуавтоматическом режиме по установленной программе. Программа работы лифта определяется дейтсвиями пассажиров, местонахождением и положением (свободна или занята) кабины и регламентируется при помощи системы управления лифтом.
Система управления лифтом должна решать задачи безопасного и комфортного передвижения пасажиров. Передвижение должно осуществяться с допустимым ускорением, требуемой скоростью и отсутствие ощутимых рывков. Для выполнения приведённых требований необходимо получать информацию о положении и скорости движения кабины с помощью различных датчиков.
Большое внимание необходимо уделить вопросу безопасности передвижения в случаях пожаров и землятресений, обрыва канатов, срабатывания ловителей.
Современные тенденции развития электропривода лебёдки и лифтового оборудования направлены в сторону отказа от машинного помещения и создания автономной конструкции лифта. То есть лифт содержит в себе все механизмы предвижения включая лебёдку.
Так патент №2352514 выданный фирме Коне Корпорейшн в 21.01.2004 содержит следующее описание:
Изобретение касается лифта, который предпочтительно выполнен без машинного отделения. Лебедка лифта взаимодействует с подъемными канатами посредством канатоведущего шкива, при этом указанные канаты имеют несущую часть, сплетенную из стальной проволоки круглого и/или некруглого поперечного сечения, и удерживают противовес и кабину лифта, перемещающиеся по своим направляющим. Вес лебедки не более составляет приблизительно 1/5 веса номинальной нагрузки лифта. Внешний диаметр канатоведущего шкива, приводимого в действие лебедкой лифта, составляет не более приблизительно 250 мм, а кабина лифта и противовес подвешены с использованием нескольких проходов подъемного каната. Изобретение позволяет уменьшить размеры и/или вес ли
Также следует отметить немаловажную роль способности системы управления остановить кабину с точностью на заданном уровне. Патент № 2202508 выданный Лаврову В.В. 20.03.2005, описывающий способ точной остановки пола кабины лифта на уровне посадочной площадки.
Изобретение относится к лифтостроению, в частности к способам, обеспечивающим точность остановок кабин пассажирских лифтов. Способ точной остановки пола кабины лифта на уровне посадочной площадки заключается в том, что система управления лифтом вырабатывает команды, подаваемые на исполнительное устройство, которым является тормоз лебедки, используя сигналы, поступающие от датчиков в шахте для затормаживания объекта регулирования лифта, фиксирует с помощью измерительного элемента положение кабины лифта и по результатам измерения вырабатывает команду на обеспечение воздействия исполнительного механизма на объект регулирования. При этом объектом регулирования, на который оказывает воздействие исполнительный элемент, является пол кабины, совмещенный с ее порогом и отделенный от этой кабины, а воздействие упомянутого исполнительного механизма, размещенного на самой кабине, осуществляется с возможностью выравнивания уровня пола кабины с уровнем порога дверей шахты выбранной посадочной площадки и происходит при неподвижной кабине лифта за время, не превышающее времени открытия дверей кабины и шахты на выбранной посадочной площадке при получении соответствующего сигнала измерительного элемента. Сигнал на время включения исполнительного механизма, определяющий расстояние, на которое необходимо переместить пол кабины, вырабатывается устройством сравнения, которое сопоставляет сигнал с измерительного элемента с сигналом, записанным в запоминающем устройстве и характеризующим точное местоположение порога дверей шахты выбранной посадочной площадки, и сигналом с датчиков-ограничителей, контролирующих высоту подъема пола. Изобретение обеспечивает повышение точности остановки кабины относительно посадочной площадки
В настоящее время в нашей стране стоит проблема замены устаревшего лифтового оборудования. Замены редукторного электропривода с релейно-контакторной системой управления. Целесообразно использовать существующего шахтного оборудования и проводки, произвести замену лишь системы управления и приводные механизмы дверей и лебёдки лифта.
Также следует обратить внимание на использование системы управления не только для модернизации существующего лифтового оборудования, но и использование в новом строительстве.
Отсюда следует, что использование для модернизации существующего оборудования линейных двигателей или расположения электропривода на кабине лифта будет требовать существенных денежных затрат. Поэтому следует обратить внимание на безредукторный электропривод. Исключение из конструкции лифтовой лебёдки редуктора и использование в качестве приводного двигателя высокомоментный асинхронный электродвигатель позволит решить задачу модернизации с наименьшими затратами.
Развитие высокомоментных двигателей позволило отказаться от использования дорогостоящего редуктора. Что позволило уменьшить шумы, улучшить согласованние с инерцией нагрузки и снизить стоимость системы электропривода лебёдки для лифтов различной конструкции.
Прямой (безредукторный) привод означает отсутствие элементов передачи мощности между двигателем и приводимой во вращение нагрузкой, что, в свою очередь, дает преимущества перемещения с высокой динамикой практически без люфта и превосходную жесткость при статических/динамических нагрузках.
Похожие работы
... трапа (но не менее 600 мм); для вертикальных трапов—600 мм. Между площадками и трапами нельзя делать порогов, а также размещать в пределах площадок какие-либо предметы (рымы, органы управления системами, оборудованием), о которые можно споткнуться. Над площадками и маршами наклонных трапов по всей их длине и ширине в пределах высоты двух метров не допускается располагать какое-либо оборудование, ...
... операциях размещения и приема турецкой стороной при превышении плановых возможностей приема туристов со стороны прямого турецкого партнера ЧП "Аджунавиа-тур". Глава 3. Совершенствование системы управления международным туризмом чп "аджунавиа-тур" 3.1. Обоснование конкурентной привлекательности разработки нового туристического направления в деятельности ЧП "АДЖУНАВИА-ТУР" Настоящее и ...
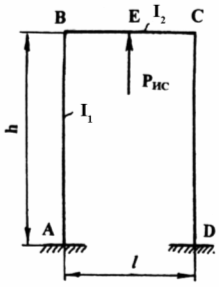
... в заделке (точка В) и момента в точке приложения нагрузки от канатной подвески (точка Е) (2.5) В реальных конструкциях лифтов величина Км ≥ 10, поэтому доля влияния моментов в узлах соединения балок со стойками очень мала, что делает вполне оправданным упрощенный расчет балок и стоек каркаса. 2.1.3 Устройство и расчет пола кабины Горизонтальная рама каркаса ...
... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
0 комментариев