Навигация
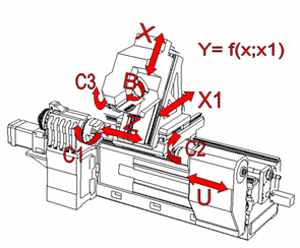
6. Разработка конструкции
Для соединения элементов используем следующие кабели:
- для соединения блока питания и сервопривода – кабель марки СПОВЭ 4x1мм2, подключение с помощью клеммной колодки TB6-RC.
- для соединения блока питания и источника постоянного тока – кабель марки СПОВ 2x1мм2, подключение розеткой 216P6 фирмы «ABB».
- для содеинения электропривода с контроллером верхнего уровня используется кабель ELFA 55-790-08, для подключение используется розетка DB-9M.
Согласно заданным климатическим условиям (УХЛ4) по ГОСТ 15150 электропривод манипулятора должен нормально работать при температуре +1…+40 ![]() и влажности 80% при 25
и влажности 80% при 25 ![]() . Электропривод СПШ20-23017 полностью соответствует данным условиям.
. Электропривод СПШ20-23017 полностью соответствует данным условиям.
Степень защиты оболочки для размещения блока питания выбираем по ГОСТ 14254-80: IP54 – относятся щиты защитные, шкафы напольные и навесные. Условия эксплуатации, хранения и транспортирования в части воздействия климатических факторов внешней среды, выбираются по ГОСТ 15543-70. Выбираем корпус фирмы «Rose» серии Multitronic. Габариты корпуса: с учетом габаритов элементов, входящих в состав блока питания. Высота 140 мм, ширина 200 мм, глубина 80 мм.
Корпус является навесным одностороннего обслуживания, односекционным. Корпус цельный, литой, выполнен из алюминия. Задняя стенка представляет собой монтажную панель для установки платы блока питания. В нижней части шкафа предусмотрена вводная кабельная панель, необходимая для вывода и вывода сетевых проводов.
Монтаж интегрированного сервопривода следует производить к плоской
металлической поверхности с центральным отверстием диаметром не менее
38,1±0,03 мм с помощью четырех шпилек или винтов М4.
Класс чистоты обработки монтажного места должен быть не ниже 1.6. Для снижения уровня вибраций и шума, а также при значительной шероховатости монтажной поверхности допускается применение полужесткой подвески с применением эластичной теплопроводной прокладки из силиконовой резины толщиной не более 1,5 мм.
При монтаже устройства следует обеспечить свободный доступ к интерфейсным и питающим разъемам. Соединительные кабели должны быть закреплены к неподвижным деталям конструкции так, чтобы исключить их случайное соприкосновение с подвижными частями и деталями механизма. При монтаже кабели не должны испытывать натяжение и нагрузки на разъемы. Они должны образовывать у разъемов небольшие петли без существенного провисания и колебаний в процессе работы механизма в сборе.
7. Методика настройки привода
Ниже приведена стандартная последовательность действий, которые необходимо совершить при настройке параметров СПШ10:
1. Выполнить подключение линий питания и интерфейсов в соответствии с описанием и схемой, приведенной в документе «Руководство пользователя».
2. Подать цифровое и силовое напряжения питания на СПШ10.
3. Подключить кабель USB к ПК.
4. Установить программное обеспечение Мотомастер© и драйвер виртуального COM-порта, находящиеся на CD-диске в соответствие с описанием, приведенном в документе «Руководство пользователя.pdf».
5. Запустить Мотомастер©.
6. Подключитесь к приводу.
7. Сделать экспорт параметров (резервное копирование). Это позволит быстро восстановить параметры привода после повреждения СПШ10 или в случае его замены.
Настройка контура скорости:
8. Перейти к вкладке «Статические параметры/Контур позиции».
9. Разомкнуть контур позиции.
10. Перейти к вкладке «Статические параметры/Контур скорости».
11. Замкнуть контур скорости.
12. Для анализа качества переходного процесса рекомендуется временно отключить режим плавного разгона, если это допускает механическая система, к которой подключается привод (параметр vp9 = «Режим с максимальной динамикой»).
13. Установить максимально допустимую скорость вращения, коэффициент
обратной связи и требуемое ускорение.
14. Перейти к вкладке «Параметры тестирования».
15. Установить параметр Tp1 в «Приращение скорости».
СПШ10 поддерживает тестовый режим, с помощью которого можно проанализировать качество переходных процессов в приводе. Эксперимент проводится
следующим образом:
1. Пользователь настраивает параметры теста.
2. Далее настраивает осциллограф и выполняет запуск эксперимента.
3. СПШ10 отрабатывает эксперимент и сохраняет 3000 выборок каждого пара-
метра (не более трех), с заданным интервалом.
4. СПШ10 передает сохраненные значения в Мотомастер©.

Описание: задает текущий тестовый режим:
1. Непрерывный режим — режим непрерывного сканирования заданных
координат.
2. Ступенька — приращение позиции на заданный шаг.
3. Синус — синусоидальное изменение позиции с заданными параметрами.
4. Приращение скорости.
5. Синусоидальное изменение скорости.
6. Параболическое изменение скорости.
7. Измерение без задания — в данном режиме задающее воздействие не вносится, происходит лишь сканирование требуемых координат в течение определенного времени.
16. Настроить параметры tp2, tp5, tp6.

Описание: параметр определяет, с какой частотой будет выполняться опрос требуемых параметров. Длительность всего эксперимента составляет Tp2•3000мксек.

Описание: если параметр Tp1=Ступенька/ Приращение скорости, то Tp5 определяет время после начала эксперимента, через которое будет выполнено приращение задающего воздействия.
Если параметр Tp1=Синус/ Синусоидальное изменение скорости, то Tp5 определяет амплитуду синусоидального задания контура позиции/скорости.
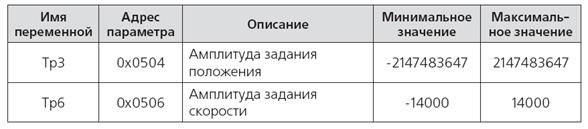
Описание: если параметр Tp1=Ступенька/ Приращение скорости, то Tp6 определяет приращение, которое будет добавлено к текущей позиции/скорости в момент проведения теста. Если параметр Tp1=Синус/ Синусоидальное изменение скорости, то Tp6 определяет амплитуду синусоидального задания контура позиции/скорости.
17. Перейти в окно осциллографа.
18. Выбрать каналы тестирования (не более трех). Например, текущая скорость вращения, заданный ток в роторной системе координат. При этом выставить множитель тока в 1000.
19. Выполнить запуск теста и дождаться отображения графиков на экране.
20. Проанализируйте качество переходного процесса.
21. Увеличьте значение параметра tp2, если эксперимент завершился прежде,
чем закончился переходный процесс.
22. Уменьшите значение параметра tp2, если разрешение графиков оказалось
слишком низкое.
23. При необходимости скорректируйте пропорциональный и интегральный
коэффициенты контура скорости и повторите эксперимент.
24. Установите значение vp9 в состояние «Режим плавного разгона/торможения».

Значение по умолчанию: 1.
Описание:
1. Режим плавного разгона/торможения. В данном состоянии внутренний интерполятор включен.
2. Режим с максимальной динамикой — без использования внутреннего интерполятора. В данном режиме вал двигателя выполняет разгон с максимальным ускорением. Данный режим используется, если привод работает под управлением системы управления верхнего уровня, которая реализует интерполяцию.
25. Установите требуемое значение ускорения.
26. Выполните анализ переходных процессов с новыми настройками.
27. Настройте параметр vp8 (Максимальная скорость вращения) в соответствие с максимальной рабочей нагрузкой на валу двигателя таким образом, чтобы скорость вращения вала достигала заданного значения в статическом режиме.

Значение по умолчанию: 4000 об/мин.
Описание: определяет максимальную скорость задания для замкнутого контура управления скоростью.
28.Настройте параметр vp6 в соответствие с требованиями системы по безопасности.

Значение по умолчанию: 5 секунд.
Описание: время, в течение которого скорость вала двигателя должна достигнуть заданного значения. Если скорость вала не достигла заданного значения, то происходит аварийный останов привода. При этом состояние привода переводится в «Останов по перегрузке».
29. При появлении резонансов в определенных диапазонах скоростей вращения выполните настройку vp10-vp13, которые позволяют исключить два диапазона скоростей из функции плавного разгона/торможения.
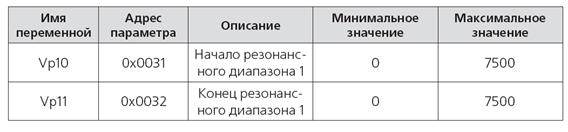
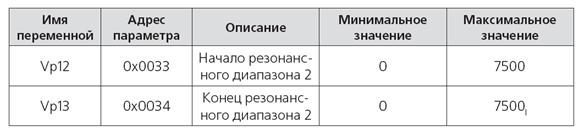
Значение по умолчанию: 0.
Описание: с помощью данных параметров можно задать 2 диапазона скоростей, которые будут исключаться из функции плавного разгона и торможения.
Если начало и конец диапазона равны, то диапазон не выбран.
Если начало диапазона меньше, чем конец, то диапазон выбран.
Настройка контура позиционирования:
30. Перейти к вкладке «Статические параметры/Контур положения».
31. Установите параметр «Состояние контура положения» в значение «Замкнут».
32. Установить минимальное значение pp1.
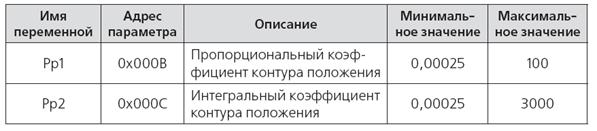
Значения по умолчанию: 5; 0.
Описание: коэффициенты ПИ регулятора контура положения.

Значение по умолчанию: 500.
Описание: предусмотрено несколько частот дискретизации, из которых пользователь может выбрать требуемую частоту дискретизации в зависимости от стоящей перед ним задачи.
33. Перейти к вкладке «Параметры тестирования».
34. Установить параметр Tp1 в «Ступенька».
35. Настроить параметры tp2, tp3, tp5.
36. Перейти в окно осциллографа.
37. Выбрать каналы тестирования (не более трех). При этом не допускается установка одновременно двух параметров «Заданное положение», «Текущее положение». Пример выбранных параметров: текущее положение, текущая скорость вращения, заданная скорость вращения.
38. Выполнить запуск теста и дождаться отображения графиков на экране.
39. Проанализируйте качество переходного процесса, при необходимости настроив смещение и множители.
40. При необходимости скорректируйте параметры pp1, pp2, pp3 и повторите эксперимент.
41. Перейти к вкладке «Статические параметры/Интерфейс».
42. Установите параметр «Источник опорного сигнала» в требуемое значение.

Значение по умолчанию: Интерфейс USB.
Описание: определяет интерфейс, по которому выполняется управление приводом.
Список возможных интерфейсов:
• 0: интерфейс USB;
• 2: интерфейс StepDir;
• 4: аналоговый интерфейс;
• 5: интерфейс CAN;
• 6: квадратурный интерфейс.
43. При выборе интерфейса Step/Dir выполните настройку параметра ip1.
44. При выборе аналогового интерфейса выполните настройку параметров ip1,ip6, ip12.
45. При выборе CAN интерфейса произвести настройку параметра ip9.

Значение по умолчанию: 0 (режим не выбран).
Описание:
СПШ10 поддерживает несколько режимов синхронизации по шине CAN:
• режим не выбран;
• режим ведущий. В этом режиме СПШ10 передает текущую позицию в качестве задающего воздействия для ведомого устройства, адрес которого в параметре Ip8;
• режим ведомый. В этом режиме СПШ10 отрабатывает задание по позиции, полученное от узла с адресом (Ip8);
• режим контурного управления. В этом режиме СПШ10 отрабатывает задание по скорости или позиции, полученное от узла с адресом (Ip8);
• синхронизация по команде SYNC. Данный режим аналогичен предыдущему.
Однако установка полученного задания выполняется только при получении команды синхронизации от системы верхнего уровня. Кроме этого, выполняется синхронизация контура скорости. Данный режим позволяет выполнить синхронизацию контуров управления нескольких приводов СПШ10.
Завершение настройки:
45. После выполнения настройки сделать экспорт параметров (резервное копирование). Это позволит быстро восстановить параметры привода после
повреждения СПШ10 или в случае его замены.
46. Выполните сброс контроллера, чтобы все параметры вступили в силу.
47. В течение первого времени штатной эксплуатации выполните анализ температурного режима. Для этого через 30, 60, 120, 360 минут оцените текущую температуру и обеспечьте требуемые условия эксплуатации в случае приближения температуры к указанной в параметре Ер5.

Значение по умолчанию: 70 °С.
8. Заключение
В рамках данного курсового проекта был спроектирован электропривод механизма выдвижения руки манипулятора. Выбранный сервопривод включает в себя сервоусилитель, серводвигатель, ПЛК и энкодер. Сервоусилитель при максимальной входной импульсной частоте и при разрешении энкодера 2000 имп/об обеспечивает высокоточное регулирование положения. Разработанный блок питания допускает колебания напряжения ±10% при устойчивой работе, что удовлетворяет условиям поставленной задачи. Выбранный серводвигатель выдерживает нагрузку, соответствующую перемещаемой массе 100 кг при максимальной скорости 0,5 м/с. Выдвижение руки манипулятора осуществляется при помощи шарико-винтового механизма.
Список литературы
1. Справочник по автоматизированному электроприводу/ Под ред. В.А. Елисеева, А.В. Шинянского. – М.: Энергоатомиздат, 1983. – 616 с.
2. Белов, М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: Учеб. для вузов/М.П. Белов, В.А. Новиков, Л.Н. Рассудов. – М.: Изд. центр «Академия», 2004. -578 с.
3. Ключев, В.И. Электропривод и автоматизация общепромышленных механизмов: Учеб. для вузов/ В.И. Ключев, В.М. Терехов. – М.: Энергия, 1980. – 358 с.
4. Сафонов, Ю.М. Электроприводы промышленных роботов/ Ю. М. Сафонов. – М.: Энергоатомиздат, 1990. – 176 с.
5. Бурдаков, С.Ф. Проектирование манипуляторов промышленных роботов и роботизированных комплексов/ С. Ф. Бурдаков, В.А. Дьяченко, А.Н. Тимофеев. – М.: Высшая школа, 1986. – 263 с.
6. Усатенько, С.Т. Выполнение электрических схем по ЕСКД: Справочник/ С. Т. Усатенько, Т.К. Каченюк, М. В. Терехова. – М.: Изд-во стандартов, 1990. – 325 с.
7. Александров, К.К. Электротехнические чертежи и схемы/ К. К. Александров, Е. Г. Кузьмина. – М.: Энергоатомиздат, 1990. – 288 с.
8. http://www.servotechnica.ru
9. www.avtomatika.info
Похожие работы
... суппорта, наибольшее перемещение суппорта, шаг нарезаемой резьбы. Для токарной операции выбираем токарно-фрезерный обрабатывающий центр с ЧПУ мод. 1730Ф6, предназначенный для комплексной обработки деталей типа тел вращения На станке возможно выполнение следующих операций: - наружного точения цилиндрических и фасонных поверхностей; - растачивания, сверления, развертывание отверстий соосных ...
... мощности они не создают заметных затруднений при эксплуатации. Поэтому перевод промысловых подъемников на дизели следует признать мероприятием, вполне обоснованным как технически, так и экономически. 2. Расчет деталей подъемника Выбрать диаметр и тип каната для оснастки талевой системы. Решение. Из выбранного оборудования для талевой системы видно, что оно рассчитано на канат диаметром ...
0 комментариев