Навигация
Поняття та класифікація систем радіоавтоматики
11954
знака
0
таблиц
3
изображения
Поняття та класифікація систем радіоавтоматики
1. Основні поняття та визначення
Сукупність пристроїв, що забезпечують автоматичний процес керування, називається автоматичною системою.
Основними елементами автоматичної системи є об'єкт керування і керуючий пристрій.
Будь-яка автоматична система є інформаційною системою, оскільки усередині її циркулюють потоки інформації.
Носіями інформації є сигнали.
Інформацією називається будь-яка сукупність відомостей, первинним джерелом яких є експеримент.
Розрізняють початкову і робочу інформацію. Початкова (апріорна) інформація – це сукупність відомостей про процес керування, необхідних для побудови і функціонування системи керування. Робоча інформація – це сукупність даних про стан процесу, що використовується у процесі керування.
Робота будь-якої системи радіоавтоматики відбувається в умовах дії різних перешкод. Перешкоди вносять у процес керування дії, що дезінформують.
Керуванням називається будь-яка дія, заснована на використанні інформації, яка вносить бажані зміни у процес, що підлягає керуванню.
Регулювання – це окремий випадок керування, при якому бажаний стан об'єкта керування забезпечується шляхом стабілізації однієї чи декількох фізичних величин згідно з заданими значеннями.
Більшість сучасних систем радіоавтоматики будується на основі використання принципу регулювання по відхиленню. Він передбачає негативний зворотний зв'язок виходу системи з її входом. У результаті цього система виходить замкнутою. На схемі (рис. 1) на елемент порівняння (ЕП) через задавач (3) надходить вхідна керуюча дія х(t). Від давача (Д) надходить сигнал зворотного зв'язку у(f). Призначення задавач (3) і давач (Д) – перетворення сигналів х(t) і у(t) у форму електричної напруги. У деяких системах радіоавтоматики елементи (3) і (Д) можуть бути відсутні.
На виході елемента порівняння (ЕП) утвориться сигнал помилки z(t), що підсилюється в підсилювачі (П). Вихідний сигнал підсилювача (П) впливає на виконавчий елемент (ВЕ), що у свою чергу впливає на об'єкт керування (ОК) так, щоб увесь час зводити сигнал помилки до мінімуму.
Крім вхідного керуючого впливу х(t), на систему радіоавтоматики діють різні збурювання Z1(t), Z2(t), ..., Zn(t).
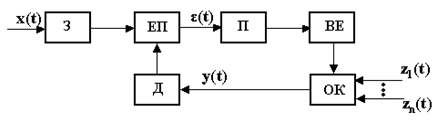
Рисунок 1 – Схема системи, що працює на основі регулювання по відхиленню
Крім зазначених елементів, у систему радіоавтоматики можуть входити коригувальні елементи (КЕ), необхідні для додання системі необхідних якісних показників при належному запасі стійкості.
Система є стійкою, якщо виведена зі стану рівноваги яким-небудь збурюванням, вона повертається у вихідний стан після усунення цього збурювання.
Поряд із принципом регулювання по відхиленню, у ряді випадків у системах радіоавтоматики застосовується принцип регулювання по збурюванню, сутність якого зводиться до компенсації збурювання. Цей принцип реалізується у розімкнених системах. Перевагою принципу регулювання по збурюванню є простота реалізації. Недолік цього принципу – відсутність контролю за вихідною величиною у(t), що виключає її вплив на об'єкт керування (регулювання).
У ряді випадків застосовують комбіновані системи радіоавтоматики, що об’єднують обидва принципи регулювання.
2. Класифікація систем радіоавтоматики
У зв'язку з великою різноманітністю систем радіоавтоматики їх класифікують за рядом ознак: принцип регулювання, вид сигналу помилки, вид статичних характеристик і т.ін.
За принципом регулювання системи радіоавтоматики (РА) розділяють на замкнуті системи, у яких реалізується принцип регулювання по відхиленню, і розімкнуті системи, у яких реалізується принцип регулювання по збурюванню.
За видом сигналу помилки системи РА розділяють на безперервні, у яких сигнал помилки є безперервна функція часу, що обумовлено аналоговою формою вхідного впливу х(t), і дискретні, у яких сигнал помилки має переривчастий характер у часі, що обумовлено природною чи штучною дискретизацією вхідного впливу у часі.
За видом статичних характеристик системи РА розділяють на лінійні, у яких залежність вихідного процесу від вхідного впливу є лінійною, і нелінійні, у яких ця залежність описується нелінійною функцією через те, що один чи кілька ланок системи мають нелінійну статичну характеристику.
За характером початкової інформації системи РА розділяють на звичайні ( з повною початковою інформацією) і кібернетичні (з неповною початковою інформацією). У свою чергу звичайні системи розділяють у залежності від типу вхідного впливу на стабілізуючі системи, у яких вхідний вплив є постійною величиною:
- системи програмного регулювання, у яких вхідний вплив змінюється за заданою програмою;
- слідкувальні системи, у яких вхідна дія змінюється довільно.
Кібернетичні системи РА розділяють:
- на адаптивні, у яких структура і спосіб функціонування змінюються цілеспрямовано з метою забезпечення оптимального функціонування об'єкта;
- ігрові, у яких процес керування розглядається як гра двох і більше сторін.
0 комментариев