Навигация
1. Датчик температуры.
Одним из вариантов датчика может быть датчик, на основе термотранзистора MTS105 фирмы Motorolla. При фиксированном токе коллектора напряжение база – эмиттер транзистора линейным образом зависит от температуры. Эта зависимость имеет линейный вид и представлена на рис. 5.8.
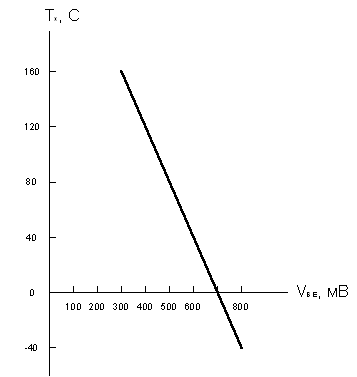
Рис. 6.8. Температурная зависимость напряжения база- эмиттер для транзистора MTS105 фирмы Motorolla.
Сам термометр с использованием в качестве датчика транзистора MTS105 представлен на рис. 5.9.
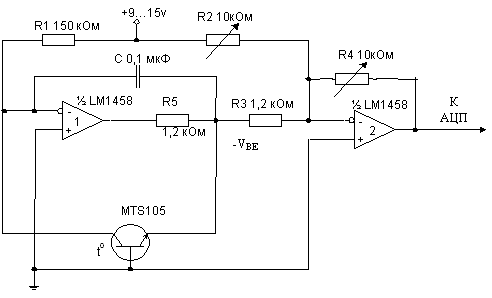
Рис. 5.9. Датчик температуры на базе MTS105
Резистор R1 определяет коллекторный ток транзисторного датчика. Этот резистор должен обладать высокой стабильностью и низким температурным коэффициентом сопротивления (например, металлопленочный резистор).
Получаем величину постоянного коллекторного тока:
Ik = Uп / R1 = 15В / 150кОм = 0,1 мА
Операционные усилители ОУ1 и ОУ2 должны иметь малый дрейф. На выходе ОУ1 будет действовать напряжение -VBE. Это напряжение усиливается ОУ2. С помощью потенциометра R4 регулируется коэффициент усиления этого ОУ для поддержания выходного сигнала в пределах границ насыщения.
Получаем коэффициент усиления:
KОУ2 = Rос / Rвх = R4 / R3 = 10 кОм / 1,2 кОм
Потенциометр R2 позволяет откалибровать выходной сигнал к v0=0 при T=0 0C. Если же калибровка осуществляется программно, то этот потенциометр не нужен. Элементы R5 и С предотвращают самовозбуждение схемы. Напряжение питания +15В должно быть очень стабильным.
Для калибровки транзисторный датчик погружается в ледяную ванну, и с помощью потенциометра R2 устанавливается напряжение
v0=0, что соответствует индикации температуры в градусах Цельсия. Точность этого термометра ±0,010C в интервале температур от –50 до +1250C. Потенциометр R4 – регулятор усиления схемы (величины выходного напряжения). Калибровка в тройной точке воды и использование прецизионной схемы обеспечивают точность ±0,010C с учетом нелинейности и долговременной нестабильности.
Вторым вариантом датчика температуры может быть датчик построенный на терморезисторах (ТР), элементах у которых электрическое сопротивление меняется при изменении температуры. В зависимости от того, возрастает или понижается сопротивление датчика при повышении температуры, различают полупроводниковые датчики соответственно с положительным и отрицательным температурным коэффициентом сопротивления ТКС. Металлические датчики температуры из никеля или платины всегда обладают положительным ТКС.
Величина сопротивления ТР с отрицательным ТКС в рабочем диапазоне температур изменяется в зависимости от температуры по экспоненциальному закону:
R=Aeв/т
где А, В-постоянные; Т-абсолютная температура, К.
Для практических расчетов величины сопротивления ТР при различных температурах окружающей среды можно пользоваться формулой:
![]()
где RT2 и RT1 - сопротивления ТР при температурах Т2 и Т1 соответственно.
Величину постоянной В определяет экспериментально измерением сопротивления R при температурах Т2 и Т1. При этом используют зависимость:
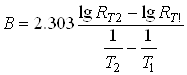
При измерениях RT2 и RT1 терморезистор необходимо помещать в ультратермостат. Температуры Т2 и Т1 должны поддерживаться и измеряться с точностью не ниже 0.05 °С .
Температурный коэффициент сопротивления ТР в рабочем диапазоне температур изменяется по зависимости:
![]()
Для точного измерения температуры в диапазоне от –200 °С до +85 °С чаще всего применяются датчики температуры из никеля и платины. Электрическое сопротивление металлических проводников изменяется согласно уравнению:
![]()
где R0 –сопротивление при 0 °С (273 К),
R1 - сопротивление при T1,
a - температурный коэффициент равный для Pt 3.9*10-3 K-1 и Ni 5.39*10-3 K-1.
Сопротивление при 0 °С в большинстве случаев выбирается равным 100 Ом. В таких случаях ТР обозначают Pt-100 или Ni-100.
Высокое электрическое сопротивление ТР позволяет пренебрегать сопротивлением подводящих проводов, контактным сопротивлением и ЭДС, что дает возможность измерять температуру на расстоянии в несколько км от точки измерения. Во всех случаях использования ТР для измерения температуры необходимо ограничить ток, проходящий через чувствительный элемент, чтобы не допустить изменения его сопротивления из-за самонагревания.
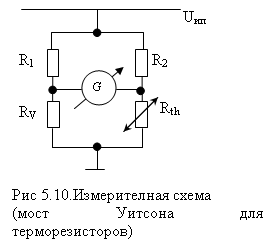
ТР включают в основном в мостовые схемы, простейшей разновидностью которой является измерительный мост (или мост Уитсона) (см. рис 5.10).
|
|
В случае измерения напряжения оно получается равным
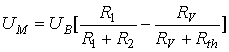
При этом нужно использовать высокоомный вольтметр, так как между точками 1 и 2 не должен протекать ток. Если применяется низкоомный амперметр, то между точками 1 и 2 возникает ток короткого замыкания, определяемый выражением
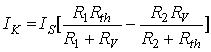
где IS - ток питания.
Практически применимая схема показана на рис.5.11.
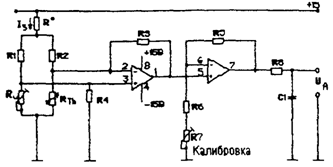
Рис.5.11. Принципиальная схема прибора для измерения температуры
Измерительный ток IS должен быть очень мал. чтобы не вызывать нагревание резистора Rth, которое может привести к ошибкам измерения. Эта так называемая погрешность самонагрева зависит от подводимой электрической мощности (Р =I2R), величины отводимого тепла и приборной постоянной ЕК, называемой коэффициентом самонагрева. Обусловленное самонагревом повышение температуры можно рассчитать по формуле
![]()
где Т1 и Т2 - значение температуры при наличии и отсутствии измерительного тока IS , Р - подводимая к измерительному сопротивлению мощность (в милливаттах), ЕК - коэффициент самонагрева (м Вт/°С).
Обычно величину ЕК как характеристику датчика указывают для измерений в воде и воздухе.
Пример:
При измерении температуры воздуха датчиком типа W60/24 применена схема рис. 5.11.
При 0°С имеем R1 = R2 = RV= Rth=100 Ом.
Коэффициент ЕК для Pt - 100 (W60/24) равен 4 мВт / °С. При необходимости измерения с погрешностью не более 0.25°С через датчик должен протекать измерительный ток, равный лишь
![]() .
.
Следовательно, ток IS должен быть равен 6 мА. а соответствующее ему добавочное сопротивление
![]()
Сигналы измерительного моста с помощью мостикового усилителя тока преобразуются в напряжение. При этом сопротивления R3 и R4 должны быть выполнены в виде 0.1 %-ных металлопленочных резисторов. В зависимости от типа датчика R3 и R4 находятся в диапазоне от 1 до 50 кОм. Калибровка измерительной схемы осуществляется с помощью потенциометра R7 во втором, неинвертирующем каскаде усилителя. Коэффициент усиления этого каскада определяется сопротивлениями R5, R6, R7. При R5 = R7 = 1 МОм и R6 = 100 кОм измерительный сигнал можно усилить еще примерно в десять раз. Резистор R8, и конденсатор С1 формируют RC - цепочку для фильтрации и демпфирования сигнала. Типичными параметрами являются R8 = 10 кОм и С1 = 4.7 мкФ.
Настройка схемы осуществляется следующим образом.
1. Определить R* по заданному ЕК.
2. Впаять R* и проверить IS путем измерения падения напряжения на R*.
3. Погрузить датчик температуры Rth в ванну с тающим льдом.
4. Регулирующим потенциометром RV установить напряжение на нуль.
5. Датчик температуры Rth погрузить в ванну с кипящей водой.
6. Регулирующим потенциометром R7 установить выходное напряжение на 1В.
Если чувствительность недостаточна, то сопротивление R3, R4 следует увеличить. При слишком высокой чувствительности эти сопротивления следует уменьшить. В качестве Rth можно применять любые, выпускаемые промышленностью, терморезисторы типа Rt-100.
Похожие работы
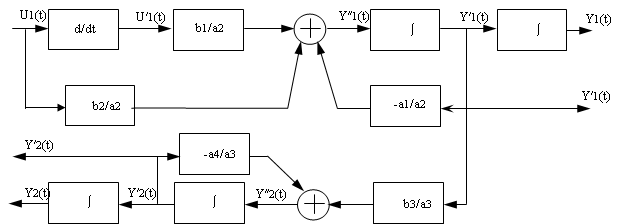
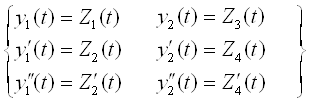
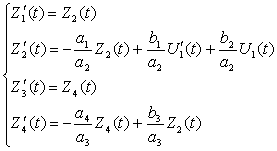
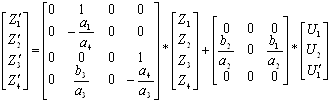
... процесса строим желаемую ЛАЧХ скорректированной системы, а затем находим передаточную функцию, схему и параметры корректирующего устройства. 1. Синтез системы управления квазистационарным объектом 1.1 Математическая модель нестационарного динамического объекта Для представления динамического процесса заданного системой дифференциальных уравнений в переменных состояния решим её ...



... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...

... информации. Набираемая информация отображается на дисплее, что позволяет контролировать ее правильность. Клавиатура и дисплей АИС должны быть независимыми от других навигационных устройств. Судовыми системами отображения АИС могут быть система отображения электронных карт (ECDIS, ECS, RCDS), РЛС, САРП или дисплей персонального компьютера. АИС и связанные с ней датчики информации питаются от ...
... и сигнализация нарушений и аварийных ситуаций с их протоколированием; Возможность дистанционного управления регулирующими исполнительными механизмами; Надежность. Для более эффективного функционирования системы автоматизации можно предъявить к Scada-пакету следующие требования: Контроль над технологическим процессом, состояние технологического оборудования и управление процессами и ...
0 комментариев