Навигация
Выбор типа регуляторов и расчёт их параметров
20450
знаков
7
таблиц
4
изображения
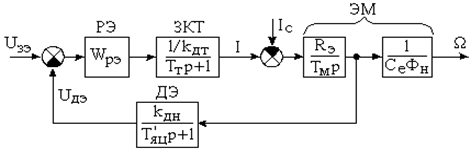
8. Выбор типа регуляторов и расчёт их параметров
Вид передаточной функции и параметры регуляторов буду выбирать таким образом, чтобы выполнить заданные требования к настраиваемому контуру регулирования. Точный расчёт ведется с помощью логарифмических амплитудных частотных характеристик по методике, изложенной в курсе ТАУ.
Предварительный выбор параметров регуляторов (метод технического оптимума).
Настройка контура регулирования тока якоря (КРТЯ)
При настройке КРТЯ нужно стремиться к достижению максимально высокого быстродействия, чтобы не допустить в переходном процессе опасных бросков тока якоря при резком приложении чрезмерной статической нагрузки. Т.е. регулятор тока должен содержать пропорциональный (П) канал. Однако П - регулятор тока, сообщая контуру регулирования высокое быстродействие, оставляет большую статическую погрешность регулирования. Это препятствует максимальному использованию двигателя по току во всём диапазоне скоростей. Поэтому применяют пропорционально – интегральный (ПИ) регулятор тока.
![]() (8.1)
(8.1)
Введём расчётную постоянную времени:
Трт = Т1 / Кяц (8.2)
Т2 = Тi max = Tяц = 0,04 с (8.3)
![]() (8.4)
(8.4)
Т1 = (0.144…0.288) с
Настройка контура регулирования скорости (КРС).
При настройке КРС поддержание заданного значения скорости независимо от приложенных возмущений и достижение требуемых по качеству процессов пуска и торможения электропривода решаются проще и качественнее для быстродействующих КРС. Но предельное быстродействие КРС ограничено условиями его устойчивости и влиянием оборотных пульсаций напряжения тахогенератора. Для стандартных электроприводов принимают wс = (15…20) рад/с.
Введём расчётную постоянную времени:
Трс = Тд / Крс (8.5)
Здесь Крс – коэффициент пропорционального регулятора скорости (РС).
Трс = 1/wс = (0.066…0,05) с (8.7)
Крс = (59...78.8)
Проверим величину статической ошибки скорости ênс в замкнутой системе с П-РС
ênсзамкн = êМс/ Крс = (1.3…1.0)% (8.8)
ênсзамкн < Δncзад ,
Значит достаточно П – РС.
![]() (8.9)
(8.9)
Уточнение параметров регуляторов
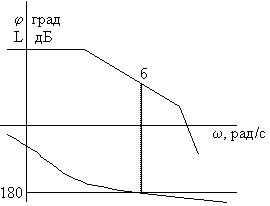
Уточнение проведем с помощью логарифмических амплитудных частотных характеристик (см.рис.8.1 и 8.2).
Т1=0.09 с Т2=0.03 с Крс=40
Расчет значений сопротивлений и емкостей РТ и РС.
Регулятор тока
wкрт = 100 рад/с
Kpт =Т2/Т1= 0.333
T1 = 0.09 c
R4 = R5= 63 кОм
R6 =10 кОм
T2 = R4 * С4
С4 = 0.5 мкФ
Регулятор скорости.
wкрс = 20 рад/с Kpс = 40
R3 = 400 кОм
R1=R2 =5 кОм
9. Построение статических характеристик замкнутой системы электропривода
Строим следующие характеристики электропривода:
-электромеханическую n = f(Iя),
-внешнюю Uя = f(Iя),
-регуляторные Uрт = f(Iя). Uрс = f(Iя),
-механическую n = f(M),
1. Uя = Ед + Iя Rяд (9.1)
Ед = w = 1 – Δw = 1 – Iя / Kpc
Uя = 1 + Iя(1/ Крс + Rяц)
2. Uрс = Кдтя * Iя * R4/R5 (9.2)
3. Uрт = Еп / Кп (9.3)
Кп = Uн / Uун = 220 / 6.25 = 35,2
4. n = f(M) (9.4)
Iя = M
Зависимости представлены на рисунке 9.1.
10. Защиты в электроприводе и расчет их уставок
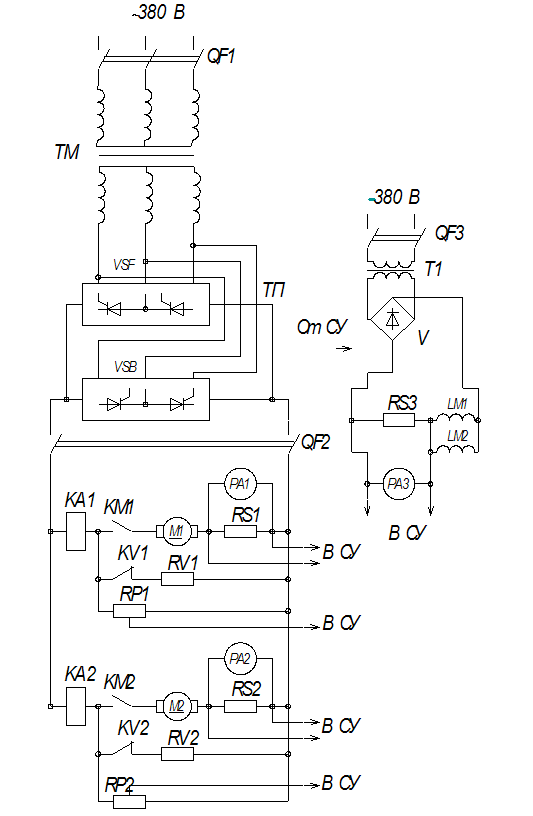
В релейно-контакторной части комплектного тиристорного электропривода выполнен ряд защит, исключающих аварийные режимы при сборке силовой схемы и обеспечивающих отключение электропривода при возникновении аварийных режимов в процессе работы.
Защита от аварийных режимов при сборке схемы.
Защита выполнена на реле КVI, КV3 и предназначена для запрета сборки схемы (включения линейного контактора), если на преобразователе или двигателе существует напряжение, превышающее порог срабатывания реле.
Настраиваются реле на минимальное напряжение втягивания. Для приводов 220 В – Uвт=0,35*220=80 В.
Нулевая защита.
Защита выполнена на блокировочном контакторе КFV, в цепь катушки которого включены все остальные защиты от аварийных режимов работающего двигателя, а также блок-контакты аппаратов, контролирующих нормальную работу тиристорного преобразователя, возбудителя и системы регулирования.
Контактор KFV обеспечивает контроль наличия оперативного напряжения и исключает самозапуск двигателя после исчезновения оперативного напряжения и его повторной подачи.
Напряжение втягивания контактора KFV обычно принимается равным 145 В при напряжении оперативной сети 220 В.
Защита от перенапряжения.
Реализована на реле KV2 и предназначена для отключения двигателя при подаче на него недопустимо большого напряжения от преобразователя (например, вследствие аварии и полного его открытия).
Установка реле KV2 рассчитывается по формуле:
Uвт=(1,1…1,15) Uнд = (242...330) В
Где Uвт-напряжение втягивания KV2, Uнд -номинальное напряжение двигателя.
Максимально токовая защита.
Реализована на реле FAI. Защита предназначена для отключения двигателя при недопустимой технологической перегрузке.
Уставка реле рассчитывается по формуле:
Iвт = (1,1…1,25) Км*Iн = (1,2…1,25)*2,5*632 = (1896…1975) А
где Iвт - ток втягивания реле FAI,
Км – перегрузочная способность двигателя,
Iн – номинальный ток двигателя.
Максимальная защита цепи возбуждения.
Защита выполнена на реле КА2 и предназначена для отключения двигателя при коротком замыкании в цепи обмотки возбуждения.
Уставка реле рассчитывается по формуле:
Iвт = 1,1 Iвн =5,324 А,
Где Iвт-ток втягивания КА2, Iв.расч - расчетное значение тока возбуждения двигателя, которое принимается при нерегулируемом потоке двигателя равным номинальному току возбуждения, при постоянно ослабленном потоке- току возбуждения при этом потоке, при регулируемом потоке-максимальному току возбуждения.
Защита от обрыва поля.
Защита реализована на реле КА1 и предназначена для отключения двигателя при обрыве в цепи обмотки возбуждения. Расчет уставки втягивания реле КА1 выполняется в зависимости от способа управления потоком возбуждения.
При постоянном потоке возбуждения ток втягивания реле КА1
Iвт = (0,5…0,7) Iвн = 2,42… 3,388А,
Защита от недопустимого увеличения скорости двигателя.
Защита выполняется посредством механического центробежного реле SR.как правило, центробежная защита выполняется на именниковых двигателях мощностью от 100 кВт и выше при условии регулирования потока возбуждения. Уставка центробужного реле обычно задается заводом-изготовителем двигателя и лежит в пределах:
Nвт = (1,1…1,2) nмакс = 1650…1800 об/мин,
Где nвт-скорость срабатывания центробежного реле, nмакс-максимальная рабочая скорость вращения двигателя.
11. Исследование качества процессов в проектируемой системе электропривода
Исследование влияния изменения параметра Т4 на вид переходных процессов представлена на рисунке 11.1 .
1.Крс=40 с
Пере регулирование s=0
Время переходного процесса tпп=0,5 с
2. Крс=80 с
Пере регулирование s=0
Время переходного процесса tпп=0,2 с
Крс=160 с
Пере регулирование s=0
Время переходного процесса tпп=0,1 с
12. Вывод
В данном курсовом проекте был спроектирован комплектный тиристорный электропривод постоянного тока на основании технических требований представленных в таблице №1. Для этого, выбран двигатель П 102, определена структура системы управления, выбран тиристорный преобразователь КТЭУ 800/220-532-1ВМДТ-УХЛ4 и трансформатор ТСЭП – 250/0,7У3 к нему, произведен синтез регуляторов.
Литература
1.Усынин Ю. С. Управление замкнутыми электроприводами: Конспект лекций . Ч.1. –
2. Усынин Ю. С., Осипов О. И., Мацин В. П.. Системы управления электроприводов: Учебное пособие к курсовому проектированию.-
3. Лебедев Е. Д.. Управление вентильными электроприводами постоянного тока. М.: Энергия 1970
4. Справочные данные по электрооборудованию. В 2 – х т. Т. 1. Электрические машины общего применения. – Л.: Энергия, 1964.
Спецификация
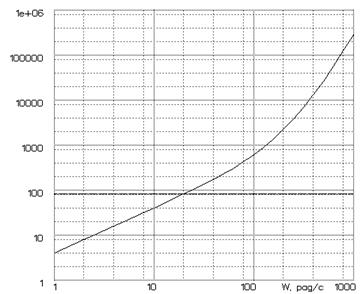
Рисунок 8.1 ЛАЧХ для уточнения параметров КРТ
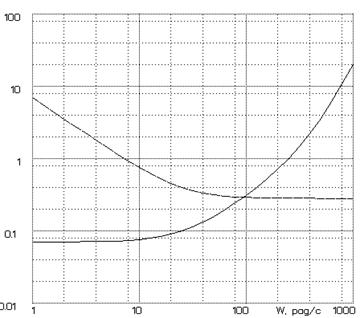 |
Рисунок 8.2 ЛАЧХ для уточнения параметров КРС.
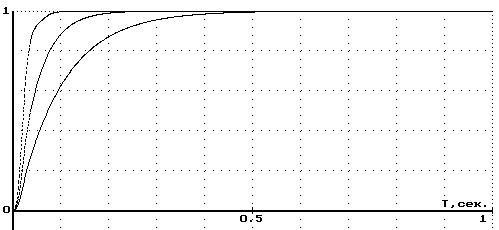 |
Рисунок 11.1. Влияние параметра Крс на показатели качества переходных процессов
Похожие работы
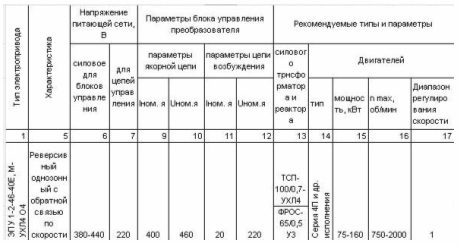
ерсивного тиристорного электропривода постоянного тока с обратной связью по ЭДС и стабилизацией тока возбуждения двигателя. Данный электропривод постоянного тока разрабатывается на основе комплектного тиристорного электропривода ЭПУ. Применение тиристорного электропривода позволяет оптимизировать его работу на отработку необходимых технологических операций. В данной курсовой работе необходимо ...

... имеют крутой передний фронт 2-5 мс, и малую длительность 10-15 градусов. Исходя из выше изложенных технических требований предъявляемых к системе управления, в проекте в качестве электропривода выбирается электропривод постоянного тока с тиристорным преобразователем, обеспечивающим регулирование напряжения на якоре двигателя. В соответствии с технологическими условиями производства система ...
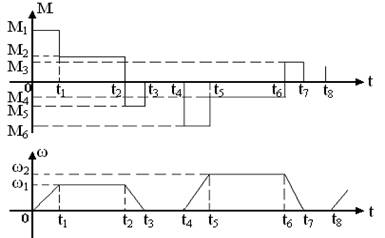
... транспорта сельского хозяйства и в быту. 1. Данные для расчета системы стабилизации скорости электропривода постоянного тока М1 = 74 Н·м t1 = 0,3 с t7 = 0,1 с М2 = 32 Н·м t2 = 53 с t8 = 2 с М3 = 48 Н·м t3 = 0,1 с ω1 = 79 с-1 М4 = - 19 Н·м t4 = 1 с ω2 = 158 с-1 М5 = - 55 Н·м t5 = 0,4 с D = 50/1 М6 = - 39 Н·м t6 = 50 с δ = 0,5% 2. Нагрузочная диаграмма и тахограмма ...
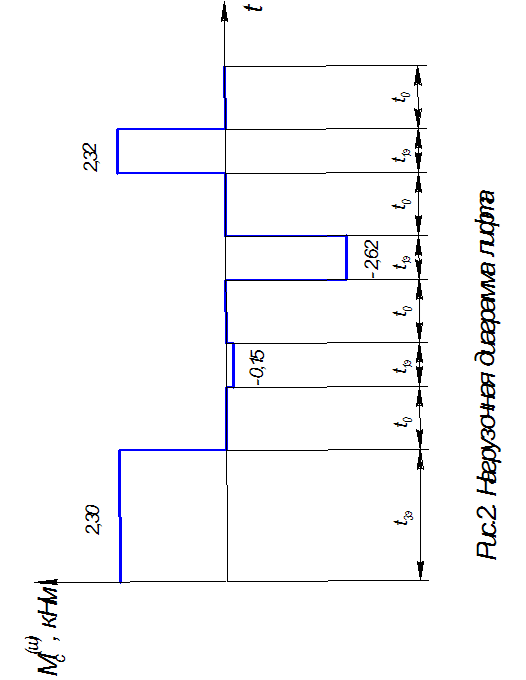
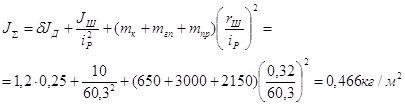
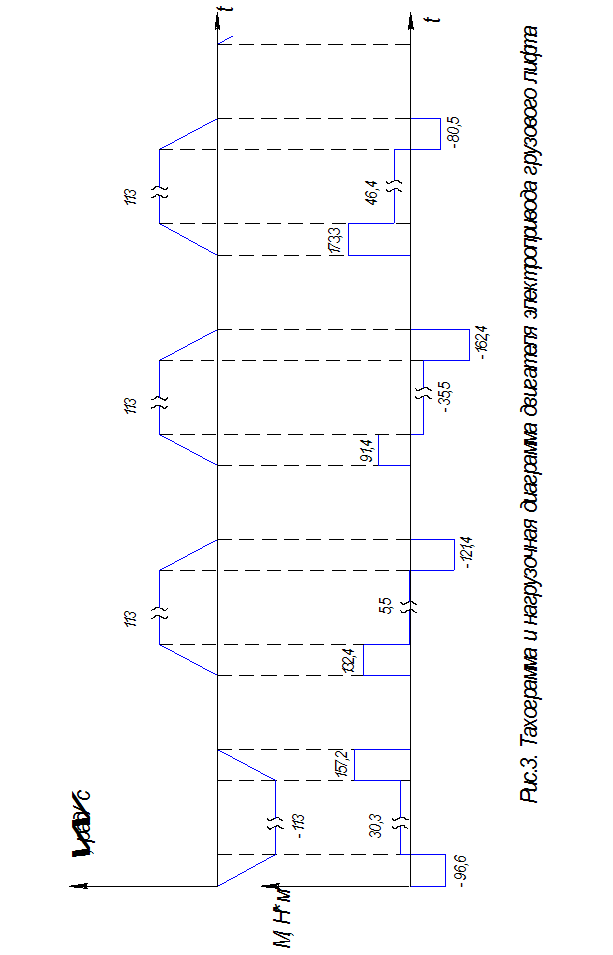
... числа редуктора Расчет передаточного числа редуктора выполняется так, чтобы максимальной скорости рабочего органа механизма соответствовала номинальная скорость двигателя. Для привода грузового лифта: Расчет и построение нагрузочной диаграммы двигателя Для проверки предварительно выбранного двигателя по нагреву выполним построение упрощенной нагрузочной диаграммы двигателя (т.е. ...
0 комментариев