Навигация
Проектирование и расчёт микронного многооборотного микроиндикатора
13134
знака
2
таблицы
5
изображений
Московский ордена Ленина, ордена Октябрьской Революции
и ордена Трудового Красного Знамени
ВЫСШИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМЕНИ Н.Э. Баумана
РАСЧЁТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКАк курсовому проекту на тему
Проектирование и расчёт микронного многооборотного микроиндикатора
2008 г.
Теоретическая часть
Описание задания
Техническое задание. Спроектировать по предложенной схеме микронный многооборотный микроиндикатор
Таблица исходных данных| Исходные данные | Обозначение | Единица измерения | Вариант № 5.2. | |
| Пределы измерения | l | мм | 0...1 | |
| Цена деления шкалы | С | мкм | 1 | |
| Диаметр шкалы | D | мм | 40 | |
| Расстояние между соседними штрихами | Х | мм | 1,1 | |
| Допускаемая погрешность измерения | d | мкм | 1 | |
| Максимальное измерительное усилие | Р | Н | 1,5 | |
| Максимальный перепад усилий | dР | Н | 0,6 | |
| Интервал рабочих | Т | °С | 20 ± 5 | |
| Габариты прибора | L * B * H | мм | 100 * 65 * 30 | |
Схема микронного многооборотного микроиндикатора
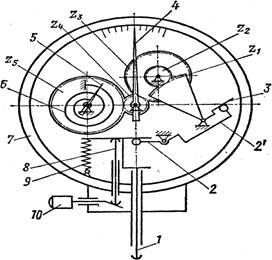
Краткое описание устройства
Микронный многооборотный индикатор состоит из:1. Стержень (шпиндель);
1-2. Синусный механизм;
2’-3. Кулисный механизм (с ведущим кривошипом);
4. Стрелка точного отсчёта;
5. Стрелка грубого отсчёта;
6. Натяжной волосок;
7. Корпус;
8. Толкатель;
9. Силовая пружина;
10. Арретир;
а также зубчатых колёс Z1 Z2 Z3 Z4 Z5
Описание работы устройства
Многооборотный индикатор служит для измерения с высокой точностью перемещения стержня (шпинделя) 1 ( см. схема стр.4). Передача движения от измерительного стержня 1 к стрелке 4 осуществляется посредством последовательного соединения синусного механизма 1—2, кулисного механизма (с ведущим кривошипом) 2'—3 и зубчатых передач Z1Z2 и Z3Z4. Отсчёт числа полных оборотов стрелки 4 производится с помощью вспомогательной шкалы, стрелка 5 которой насажана на ось зубчатого колеса Z5, находящегося в зацеплении с трибом Z4. Силовое замыкание кинематической цепи осуществляется натяжным волоском 6. Измерительное усилие создаёт силовая пружина 9. Механизм смонтирован на плате в корпусе 7. Юстировка механизма производится при помощи эксцентриковой пятки, изменяющей длину рычага 2 синусного механизма, и накладки, изменяющей угловое положение рычага 3 кулисного механизма (на схеме не показаны). Отвод шпинделя 1 вверх осуществляется арретиром 10 через толкатель 8.
Расчёт микронного микроиндикатора
0 комментариев