Содержание
Введение
1. Определение структуры и параметров объекта управления
1.1 Выбор структуры объекта управления
1.2 Определение параметров объекта управления
2. Разработка алгоритма управления и расчет параметров элементов структурной схемы
2.1 Разработка алгоритма управления
2.2 Расчет параметров элементов структурной схемы
3. Расчет статических и динамических характеристик
4. Разработка принципиальной схемы и программного обеспечения системы, выбор ее элементов
5. Разработка конструкции блока управления
Заключение
Список литературы
Задание № 16
Введение
Современный электропривод состоит из большого числа разнообразных деталей, машин и аппаратов, выполняющих различные функции. Все они в совокупности совершают работу, направленную на обеспечение определенного производственного процесса. Наиболее важным элементом является система управления электроприводом (СУЭП). От правильного функционирования системы управления зависит состояние объекта управления и правильности отработки заданных параметров.
В настоящее время СУЭП решает несколько важных задач:
Формирование статических механических характеристик электропривода с целью стабилизации скорости (или момента), расширение диапазона регулирования скорости, ограничение перегрузок, формирование адаптивных систем.
Оптимизация переходных режимов с целью повышения быстродействия, снижения динамической ошибки, ограничение ускорения, рывков и т.д.
Целью данного курсового проекта является разработка системы непрерывного управления скоростью рабочего органа в режиме слежения в заданном диапазоне. Также необходимо разработать принципиальную схему, с выбором ее элементов, и предложить вариант реализации блока управления.
1. Определение структуры и параметров объекта управления 1.1 Выбор структуры объекта управления
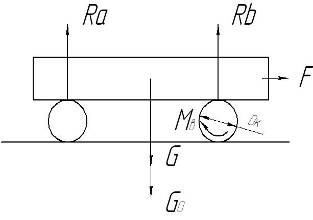
В качестве структуры объекта управления выбираем эквивалентную двухмассовую систему электропривода (Рис. 1).
Структура объекта управления.
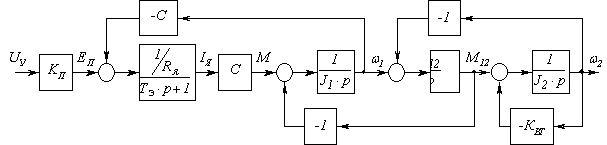
Рис. 1
1.2 Определение параметров объекта управленияВ состав объекта управления входят: широтно-импульсный преобразователь; двигатель постоянного тока ДПУ240-1100-3, технические данные которого приведены в
Табл. 1.
Табл. 1. Технические данные двигателя ДПУ240 - 1100 - 3.
| Момент, Н×м: номинальный максимальный | 3.5 17.5 |
| Номинальная частота вращения, об/мин | 3000 |
| Номинальное напряжение, В | 120 |
| Номинальный ток, А | 12 |
| КПД,% | 75 |
| Сопротивление обмотки якоря при 20° С, Ом | 0.53 |
| Индуктивность обмотки якоря, мГн | 0.53 |
| Момент инерции, г×м2 | 1.944 |
Двигатели серии ДПУ предназначены для электроприводов постоянного тока металлорежущих станков с ЧПУ и промышленных роботов. Электродвигатели длительно выдерживают номинальный момент при частоте вращения от 0.1 до 5000 об/мин. Двигатели выпускаются со встроенными тахогенераторами постоянного тока типа ТП80-20-0.2 (основные технические данные тахогенератора приведены в
Табл. 2).
Табл. 2. Технические данные тахогенератора ТП80 - 20 - 0.2.
| Крутизна выходной характеристики мВ/ (об/мин) | 20 |
| Частота вращения, об/мин: Номинальная Максимальная Минимальная | 3000 6000 0.1 |
| Погрешность в диапазоне частот 0.1 - 4000 об/мин,%, не более | 0.2 |
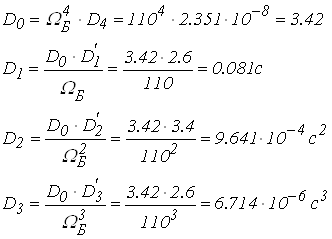
Определение параметров:
номинальная частота вращения:
![]() ;
;
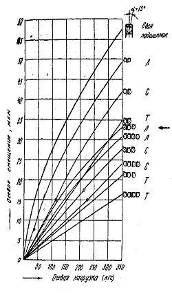
максимальная частота вращения в заданном диапазоне слежения:
![]() ;
;
максимальная ошибка слежения:
![]() ;
;
постоянная двигателя:
 ;
;
электромагнитная постоянная времени двигателя:
 ;
;
электромеханическая постоянная времени двигателя:
 ;
;
соотношение постоянных времени двигателя:
 , следовательно, можно принять, что
, следовательно, можно принять, что ![]() ;
;
напряжение двигателя, соответствующее максимальной частоте вращение в заданном диапазоне слежения:
![]() ;
;
принимая, что максимальной скорости диапазона слежения будет соответствовать максимальное задание на скорость, равное ![]() , находим коэффициент передачи преобразователя (представив преобразователь безинерционным звеном, т.к пренебрегаем дискретностью ШИП из-за высокой частоты коммутации ключей:
, находим коэффициент передачи преобразователя (представив преобразователь безинерционным звеном, т.к пренебрегаем дискретностью ШИП из-за высокой частоты коммутации ключей: ![]() ):
):
 .
.
Далее определяем параметры механической части: момент инерции рабочего органа:
 ;
;
период и частота упругих колебаний:
![]() ,
,  ;
;
коэффициент жесткости упругой передачи:
 ;
;
коэффициент вязкого трения:
 ;
;
механическая постоянная времени рабочего органа:
 .
.
2. Разработка алгоритма управления и расчет параметров элементов структурной схемы 2.1 Разработка алгоритма управления
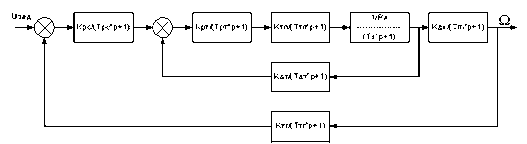
В качестве корректирующего устройства выбираем модальный регулятор, как универсальное устройство управления. Модальное управление реализуется совокупностью линейных обратных связей по переменным состояния объекта управления. Структурная схема всей системы представлена.
Структурная схема проектируемой системы управления электроприводом.
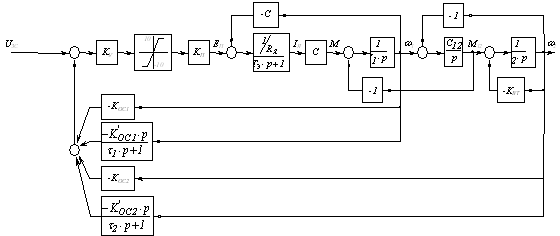
Рис. 2
Линейный (линеаризованный) объект описывается уравнением:
![]() . При модальном управлении:
. При модальном управлении: ![]() .
.
В этих уравнениях:
![]() - вектор переменных состояния;
- вектор переменных состояния;
![]() - вектор входных переменных;
- вектор входных переменных;
А - матрица объекта;
В - матрица входа;
![]() - вектор входных величин в замкнутой через модальный регулятор системе управления;
- вектор входных величин в замкнутой через модальный регулятор системе управления;
К - матрица-строка коэффициентов обратных связей по вектору ![]() .
.
Переходя к операторной форме:
![]() , здесь I - единичная матрица;
, здесь I - единичная матрица;
![]() - характеристический полином.
- характеристический полином.
Распределение корней характеристического полинома будет определять динамику системы.
Синтез модального регулятора заключается в определении матрицы К, обеспечивающей заданное распределение корней.
2.2 Расчет параметров элементов структурной схемыРассмотрим в качестве объекта управления систему электропривода (Рис. 1).
Этой структурной схеме соответствуют следующие дифференциальные уравнения:
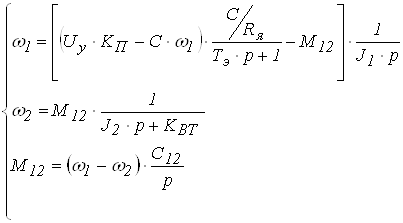 ,
,
 ,
,
 .
.
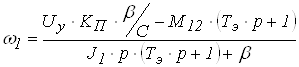
В установившемся режиме работы
(р=0): ![]() .
.
Для замкнутой через модальный регулятор системы:

В данном случае:
 ,
,
 ,
,

За вектор переменных состояния выбираем вектор:
![]() .
.
Тогда

Учитывая, что
 ,
,
 ,
,
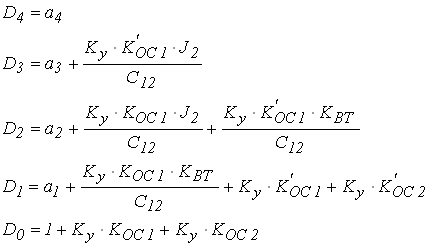
В общем виде

Нормируя
![]() ,
,
вводим базовую частоту
 , относительный оператор
, относительный оператор  .
.
Получим ![]() .
.
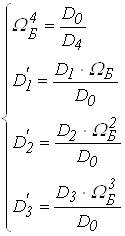
Выбираем ![]() согласно стандартной форме Баттерворта 4-го порядка
согласно стандартной форме Баттерворта 4-го порядка
![]() .
.
Задаваясь временем регулирования определяем базовую частоту
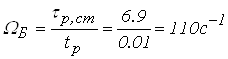 .
.
Далее находим матрицу К коэффициентов обратных связей по переменным состояния
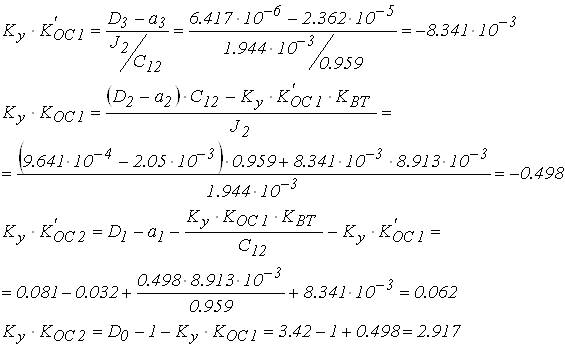
Проведя эксперимент, с помощью пакета MATLAB уточним значения коэффициентов обратных связей, подобрав следующие значения:
![]() ,
,  ,
,  .
.
3. Расчет статических и динамических характеристик
Расчет характеристик произведем с помощью пакета MATLAB 5. Модель MATLAB представлена на Рис. 2.
Ниже приведены результаты моделирования в виде графиков.
Поведение системы при гармоническом задании, частота 1 Гц амплитуда 10 В (188.5 рад/с).
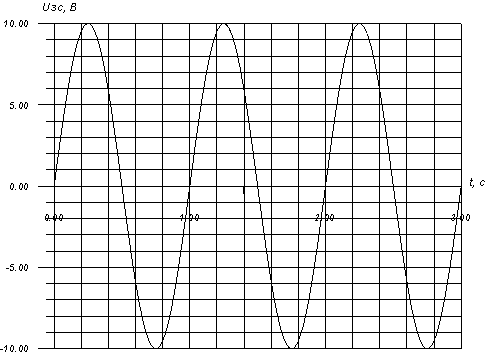
а) Задание скорости
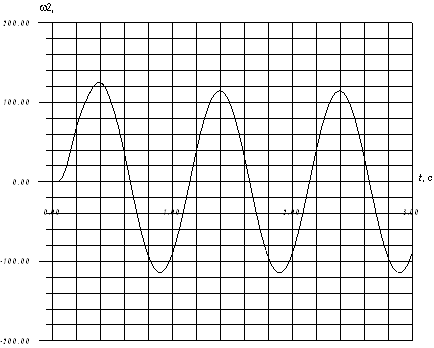
б) Отработка задания
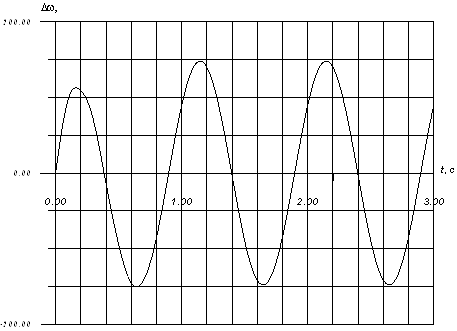
в) Изменение ошибки
Рис. 3
Как видно из приведенных выше графиков ошибка между заданием на скорость и отработкой задания недопустимо велика и, кроме того, между заданием скорости и отработкой задания есть еще и фазовый сдвиг. Для уменьшения ошибки слежения и исключения фазового сдвига скорректируем систему, введя дополнительное задание по производной скорости как показано на Рис. 4.
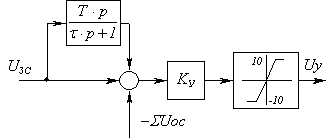
Рис. 4
Проведя ряд экспериментов, установим также, что постоянная времени Т имеет линейную зависимость от частоты гармонического задания скорости. Вид этой зависимости представлен на Рис. 5 ниже.
График зависимости постоянной времени Т от частоты гармонического задания скорости.
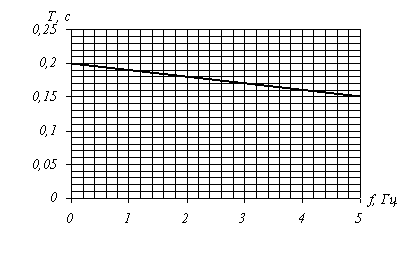
Рис. 5
Далее приведены результаты моделирования уже скорректированной системы. Из этих графиков видно, что требования, указанные в задании на проект выполняются.
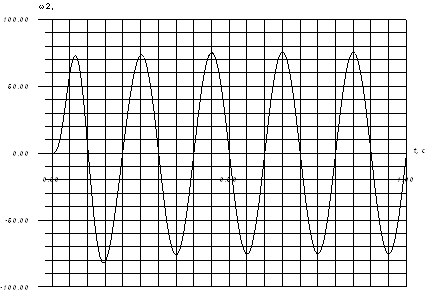
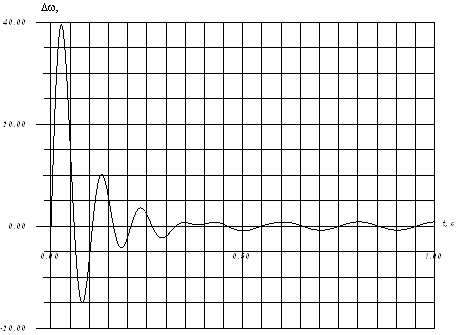
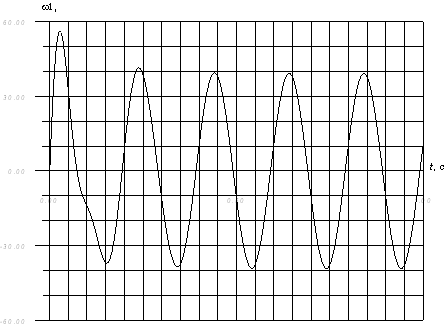
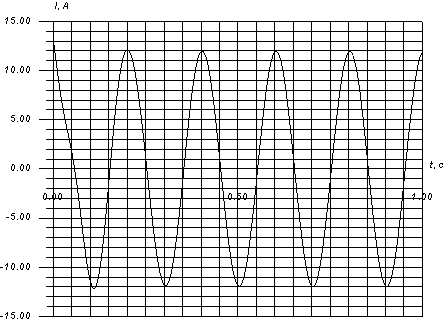
Поведение системы при гармоническом задании, частота 1 Гц амплитуда 10 В (188.5 рад/с).
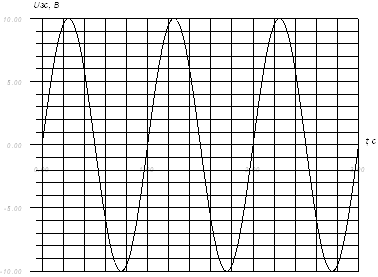
а) Задание скорости
б) Отработка задания
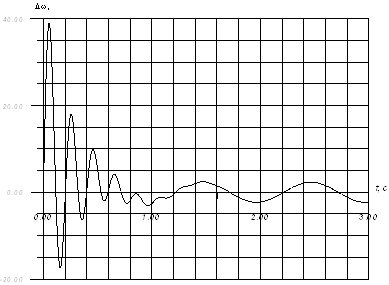
в) Изменение ошибки
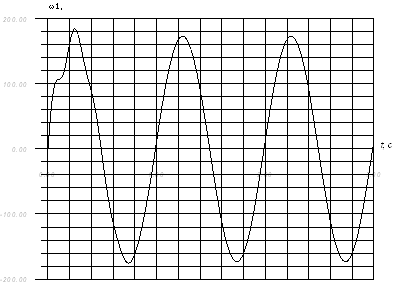
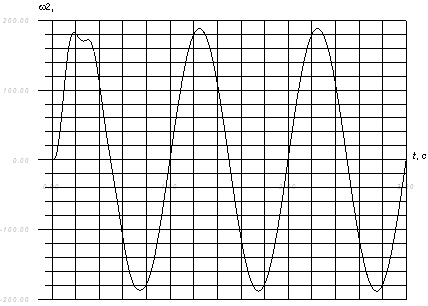
г) Скорость двигателя
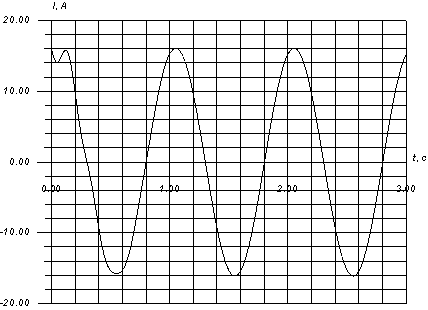
д) Ток двигателя
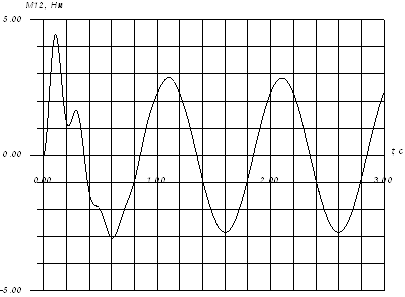
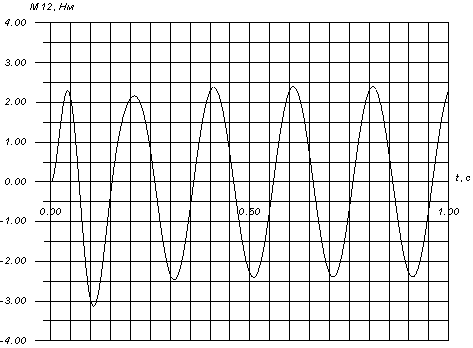
е) Упругий момент
Рис. 6
Поведение системы при гармоническом задании, частота 5 Гц амплитуда 4 В (75.4 рад/с).
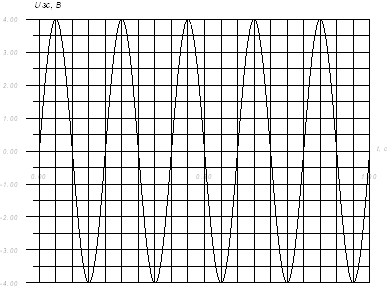
а) Задание скорости
б) Отработка задания
в) Изменение ошибки
г) Скорость двигателя
д) Ток двигателя
е) Упругий момент
Рис. 7
4. Разработка принципиальной схемы и программного обеспечения системы, выбор ее элементов
Выбираем прецизионные операционные усилители DA1…DA9 серии КР540УД17А с параметрами: Uпит=±15 В, Iпотр=5 мА, напряжение смещения Uсм=0.03 мВ. Для аналогового перемножителя берем микросхему КР525ПС2А.
Для предотвращения обратной связи по питанию для всех микросхем применяем блокировочные конденсаторы С6…С25 серии К10-17-25В-0.1мкФ.
Для синтеза обратных связей по скоростям 1-ой и 2-ой массы применим тахогенераторы ТП80-20-0.2.
Для согласования выходного напряжения тахогенератора с системой управления применим делитель, представленный на Рис. 8.
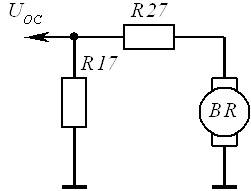
Рис. 8
Примем R17=10 кОм, тогда
![]() .
.
Выбираем R17 - С2-29-0.125-10кОм,
R27 - С2-29-0.125-26кОм.
Обратная связь по скорости.
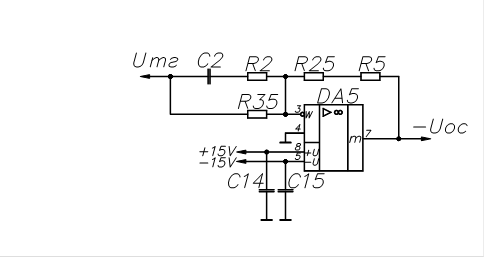
Рис. 9
Выбираем конденсатор С2=1мкФ, находим
 .
.
Выбираем R25=24 кОм, R5=2.2 кОм.
 .
.
Выбираем R35=500 кОм.
Для обеспечения устойчивости последовательно конденсатору С2 включим демпфирующий резистор R2 номиналом:
 .
.
Принимаем
С2 - К73-17-63В-1мкФ,
R25 - С2-29-0.125-24Ом,
R5 - С2-29-0.125-2.2кОм,
R35 - С2-29-0.5-500кОм.
Аналогично выбираем элементы для реализации обратных связей по скорости другой массы.
Реализация дополнительного задания по производной скорости.
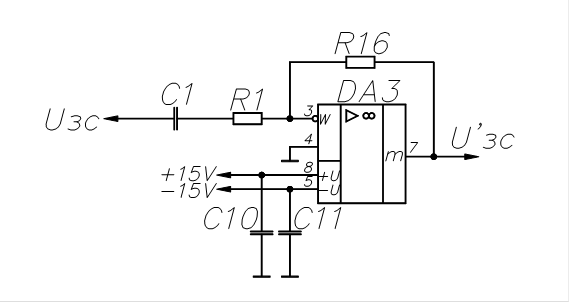
Рис. 10
Принимая Т0=0.02 с и С1=1 мкФ, находим
 .
.
Для обеспечения устойчивости последовательно С1 включаем R1 номиналом 100 Ом.
Выбираем С1 - К73-17-63В-1мкФ,
R1 - С2-29-0.125-100Ом,
R16 - С2-29-0.125-20кОм.
Реализация устройства модуля входного сигнала.
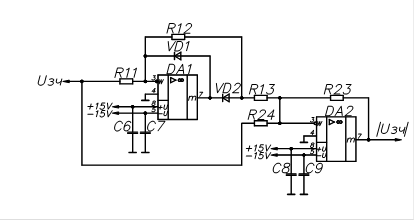
Рис. 11
Выбираем R11=R12=R13=10 кОм, тогда R23=R24=20 кОм.
Принимаем R11, R12, R13 - С2-29-0.125-10кОм,
R23, R24 - С2-29-0.125-20кОм.
Реализация усилителя с коэффициентом усиления, зависящим от Uзч.
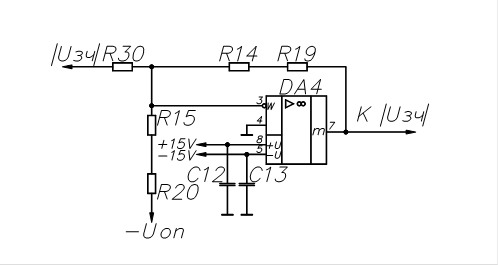
Рис. 12
Т.к. Т изменяется в пределах (0.2…0.15) с, то, выбирая Т0=0.02 с, находим пределы изменения 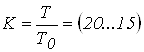 . Тогда сигналу Uзч=10 В пусть соответствует значение К=20, а при Uзч=0 - К=15.
. Тогда сигналу Uзч=10 В пусть соответствует значение К=20, а при Uзч=0 - К=15.
Для того, чтобы Т могло изменяться в указанных пределах необходимо, чтобы Uвых менялось в интервале (10…7.5) В. тогда, если выбрать Uоп=-7.5В, то находим, что R30=100 кОм, (R14+R19) = (R15+R20) = (10+15) кОм.
Выбираем R30 - С2-29-0.25-100кОм,
R14, R15 - С2-29-0.125-10кОм,
R14, R15 - С2-29-0.125-15кОм.
Реализация операции умножения двух аналоговых сигналов.
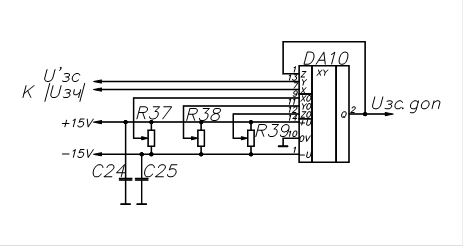
Рис. 13
Выбираем подстроечные резисторы R37, R38, R39 - СП3-38-0.125-22кОм.
Реализация сумматора с ограничением выходного сигнала и коэффициентом умножения Ку=1.6
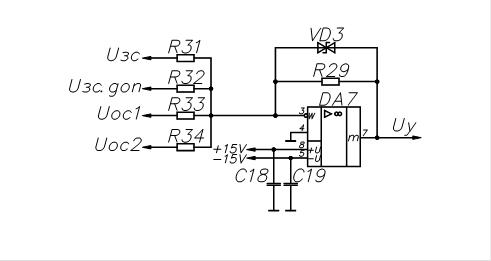
Рис. 14
Здесь выбираем R31, R32, R33, R34 - С2-29-0.25-100кОм, тогда
![]() (берем R29 - С2-29-0.25-160 кОм).
(берем R29 - С2-29-0.25-160 кОм).
Для ограничения выходного напряжения применим стабилитрон КС210Б, с параметрами: Uст=10 В, Iст=5 мА, DUст= (9…10.5) В.
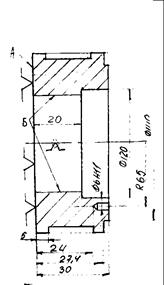
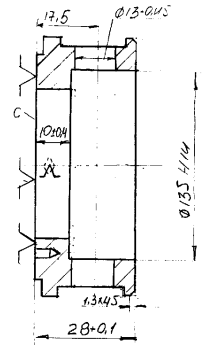
5. Разработка конструкции блока управления
При разработке конструкции блока управления необходимо учитывать ряд факторов, влияющих на конструктивное исполнение блока. Будем считать, что плата модуля управления входит с общий блок системы управления, т.е. является отдельным ее модулем. Модуль управления вставляется в общий блок по направляющим, позволяющим точно совместить разъем с ответной частью. Для удобства монтажа на передней панели предусмотрена ручка.
Все устройства блока управления собраны на выбранных ранее операционных усилителях, резисторах, конденсаторах и других элементах. Блок управления сконструирован на печатной плате из текстолита фольгированного марки СФ1 ГОСТ 10316 - 78. Монтаж элементов односторонний, разводка дорожек двухсторонняя. Расположение элементов соответствует наиболее рациональной разводке.
Для определения размеров печатной платы сначала необходимо определить суммарную площадь, которую занимают элементы.
Резисторы.
В схеме системы управления присутствуют следующие типы резисторов:
| Тип резисторов | Номинальная мощность, Вт | Размеры, мм | ||
| D | L | |||
| С2-29В
| 0.125 | |||
| 0.25 | 4.5 | 11 | ||
| 0.5 | 7.5 | 14 | ||
| СП3-38-0.125-22кОм |
| |||

Конденсаторы.
| Тип конденсатора | Емкость конденсатора, мкФ | Размеры, мм | |||
| L | В | Н | |||
| К73-17-63В
| 1 | 18 | 8 | 15 | |
| К10-17-25В
| 0.1 | 6.8 | 4.6 | 5.5 | |
| 0.22 | 8.4 | 6.7 | 5.5 | ||
| L | D | ||||
| К50-29-25В
| 10 | 22 | 6 | ||
| 100 | 27 | 8.5 | |||

Микросхемы.
В системе управления также присутствуют два типа микросхем: операционный усилитель КР140УД17А и аналоговый перемножитель КР525ПС2А.
| Микросхема |
| Число выводов | Размеры, мм | |
| L | B | |||
| КР140УД17А | 8 | 12 | 7.5 | |
| КР525ПС2А | 14 | 16 | 7.5 | |
Суммарная площадь, занимаемая элементами, примерно равна 8000 мм2. Принимая коэффициент, учитывающий "разводку" платы, равным Кразв=0.4, находим площадь поверхности платы ![]() . После приблизительного размещения находим, что длина печатной платы составляет 200 мм. Из стандартного ряда выбираем ширину платы - 120 мм.
. После приблизительного размещения находим, что длина печатной платы составляет 200 мм. Из стандартного ряда выбираем ширину платы - 120 мм.
Напряжение питания схем, сигналы с датчиков, выходные сигналы регуляторов подаются и снимаются со схемы посредством разъема типа СНО51-30/59*9Р-2.
Для уменьшения токов утечки по поверхностям платы ее необходимо покрыть с двух сторон лаком, например типа К-47.
Заключение
В данном курсовом проекте разработана система управления скоростью электропривода с двигателем постоянного тока. В качестве модели была выбрана эквивалентная структура двухмассовой системы с упругой связью двигателя и рабочего органа. Настройку системы производили с помощью модального регулятора с распределением корней характеристического уравнения по фильтру Баттерворта 4-го порядка.
Также в данном проекте произведены расчет и выбор всех элементов, реализующих данную систему. По полученным результатам мы составили принципиальную электрическую схему, и предложили один из вариантов расположения элементов на печатной плате.
Список литературы
1. "Справочник по электрическим машинам" под ред. И.П. Копылова.
2. А.В. Башарин "Управление электроприводами", Ленинград 1982 г.
3. А.В. Башарин "Примеры расчета автоматизированного электропривода на ЭВМ", Ленинград 1990 г.
4. В.И. Ключев "Теория электропривода", Москва 1985 г.
5. "Справочник по автоматизированному электроприводу" под ред.
6. В.А. Елисеева, Москва 1983 г.
7. "Справочник разработчика и конструктора РЭА. Элементная база" под ред. М.Ю. Масколенкова, Москва 1996 г.
Задание № 16
Студенту Сидорову А.А. на курсовой проект по СУЭП на тему:
"Разработка системы непрерывного управления координатами электропривода с заданными показателями качества".
Исходные данные.
Основная координата - скорость.
Режим управления - слежение в диапазоне ± (0…0.6) ×wном.
Нагрузка - вязкое трение 1-го рода, Мс (wном) =0.8×Мном.
Характеристика силового канала.
Электродвигатель - ДПУ240-1100-3.
Преобразователь - мостовой ШИП с несимметричной коммутацией на частоте 10 кГц.
Механическая часть - упругая, g=2, Fу=5 Гц.
Основные требования: ½Dw½ £ 0.02×wном при гармоническом задании в полосе частот 0…5 Гц.
Содержание проекта.
Определение структуры и параметров объекта управления.
Разработка алгоритма управления и расчет параметров элементов структурной схемы.
Расчет статических и динамических характеристик.
Разработка принципиальной схемы и программного обеспечения системы, выбор ее элементов.
Разработка конструкции блока управления.
Содержание графического материала.
Принципиальная электрическая схема системы.
Чертеж общего вида блока управления.
Схема модели и диаграммы, отражающие показатели качества.
Похожие работы





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...
... значений выходных переменных по требуемому закону. В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления. 1 Техническое задание Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками: Вариант ...
... , асбестоцементных, полимерных, рулонных кровельных и гидроизоляционных материалов и строительного стекла 2. Строительные конструкции Номенклатура показателей качества каменных и армокаменных, бетонных и железобетонных, металлических, асбестоцементных и деревянных конструкций 3. Инженерное оборудование зданий и сооружений Номенклатура показателей качества санитарно-технического ...
0 комментариев