Навигация
Разработка системы управления механизма передвижения тележки
27076
знаков
5
таблиц
10
изображений
Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
Донской Государственный технический университет
Кафедра «Робототехника и мехатроника»
УТВЕРЖДАЮ Зав. кафедрой..
«______»_____________2008 г.
ЗАДАНИЕ
на курсовой проект
Студент . Группа УМ-41
Тема:
«Разработка системы управления механизма передвижения тележки»
Срок предоставления проекта к защите «_____»____________2008г.
Исходные данные для проектирования: Вариант № 19
Содержание пояснительной записки курсового проекта:
~ Введение.
~ Техническое задание.
~ Расчетно-конструкторская часть.
~ Описание работы системы управления.
~ Заключение.
Перечень графических материалов:
1. Система управления ТП. Схема электрическая принципиальная.
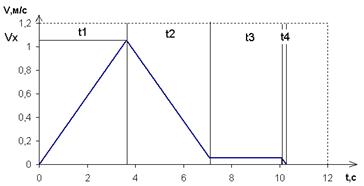
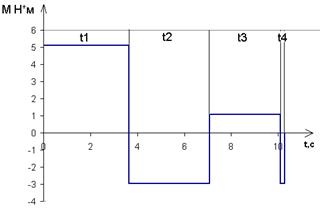
2. Переходные процессы.
Содержание
Введение
1 Техническое задание
2 Расчетно-конструкторская часть
2.1 Расчет статической мощности при передвижении тележки с номинальным грузом
2.2 Выбор двигателя
2.3 Выбор редуктора
2.4 Выбор схемы тиристорного преобразователя
2.5 Выбор силового трансформатора
2.6 Расчет параметров схемы и выбор тиристоров
2.7 Расчет параметров контура нагрузки ТП
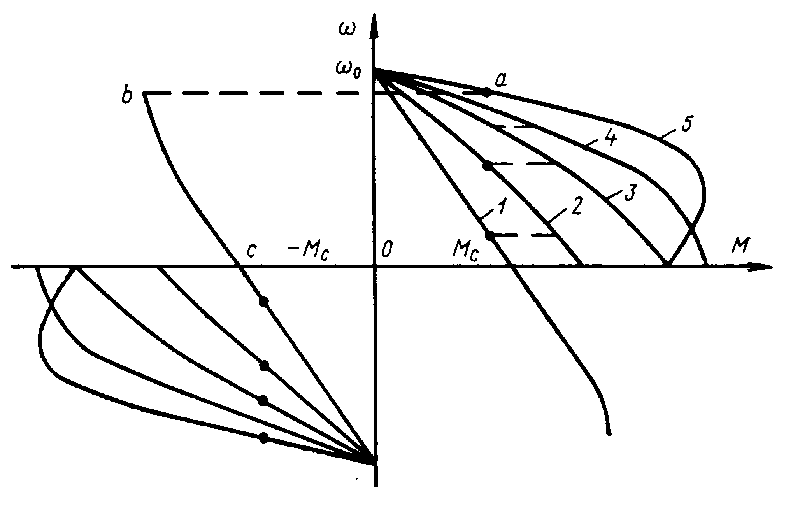
2.8 Расчет и построение электромеханических характеристик
2.9 Выбор тахогенератора
2.10 Определение параметров структурной схемы ДПТ
2.11 Динамический расчет системы привода
3 Описание работы системы управления приводом
Заключение
Список использованных источников
Введение
Целью данного курсового проекта является разработка мехатронного устройства – тележки мостового крюкового крана.
Смысловая её реализации заключается в создании универсальных, надёжных и долговечных устройств, которые тем или иным образом помогали бы человеку решать поставленные перед ним задачи. Для высокоточных производств очень важно иметь хорошую точность позиционирования рабочего органа. Как и любая другая МС состоит из электромеханической системы, которая представляет собой совокупность электродвигательного и преобразовательного устройств, системы управления, механической передачи и рабочего органа, предназначенная для приведения рабочего органа в движение и управление этим движением по заданному алгоритму посредствам микро ЭВМ или микроконтроллера. Свойства электромеханической системы определяются взаимосвязанными характеристиками элементов и образующих её подсистем (механической, электрической и магнитной). Поэтому при этапном проектировании электромеханической системы особое внимание уделяется выбору электромеханической элементной базы, электродвигателей и информационных и силовых полупроводниковых преобразователей, статических и динамических характеристик, как силовых исполнительных элементов, так и системы управления при исследовании качества регулирования электромеханической системы с использованием микроконтроллеров или ЭВМ.
Целью управления может быть решение двух обобщенных задач – поддержание некоторых параметров в определенных диапазонах и регулирование значений выходных переменных по требуемому закону.
В каждой из этих задач управляющей системе требуется сформировать выходное воздействие, реализация которого компенсирует образовавшуюся ошибку управления.
1 Техническое задание
Разработать систему управления механизмом передвижения тележки мостового крюкового крана (мехатронного объекта) с техническими характеристиками:
| Вариант..…………………………………………...……..………………..…………19 |
| Режим работы механизма…………………………………………………...………Е3 |
| Номинальная грузоподъемность, Gн, т……………………………………...……..4,9 |
| Сила тяжести самого механизма передвижения (тележки), G0, кН………...……1,9 |
| Скорость передвижения тележки, Vт, м/с……………………………………..…0,53 |
| Диаметр ходового колеса тележки, Dкт, м…………………………………….….0,4 |
| Диаметр цапфы ходового колеса, dцк, м………………………………………...0,058 |
| Относительная продолжительность включения механизма, ПВ, %.....................600 |
| Номинальная скорость вращения двигателя, nн, об/мин…………………………3,0 |
| Число включений в час, z………………………………………………………......240 |
| Скорость вращения вала рабочего органа кранового механизма, Ωм, рад/с…….2,7 |
| Значение перерегулирования, σ, %............................................................................18 |
| Допустимая статическая погрешность, δ……………………………………….0,03 |
| Время переходного процесса, tпп, с……………………………………………….0,15 |
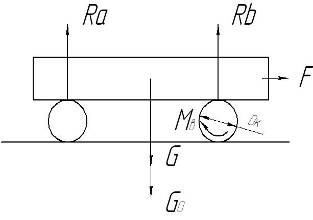
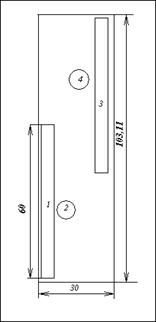
Рисунок 1.1 –Тележка мостового крюкового крана
Похожие работы
... требованиям по перегрузке. 2. Выбор системы управления 2.1 Технико-экономическое обоснование По кривым на рис. 1.3 [2] (с. 12) определяем, что для скорости передвижения тележки V=0.68 м/с и точности остановки v=20 мм требуется обеспечить диапазон регулирования D=1:10. Данному диапазону и установленной мощности электродвигателя удовлетворяют следующие системы управления [2] (табл. ...

... в роторной цепи. Разгон в направлении «Вперед» и «Назад» производится в три ступени с помощью контакторов Кб, К7 и К8 Рисунок 1 - Механические характеристики электропривода механизма передвижения с магнитным контроллером K-63: 1-4 - соответствуют положениям командоконтроллера на подъем; 4а - промежуточная характеристика; На рис. 1 приведены механические характеристики указанной схемы. Для ...
... кран общего назначения грузоподъемностью 16/3,2 т. Поступательно перемещающиеся мостовые краны часто снабжают крюками, скобами либо специальными грузозахватными устройствами (магнитами, грейферами, механическими клещами). Мостовые краны снабжены тележками, предназначенными для подъема и перемещение груза вдоль пролета. Тележки могут перемещаться по рельсам, закрепленные на верхних или нижних ...
... возникают при падениях отдельных грузовых мест (ГМ), соударениях грузов в процессе выполнения ПРР, под воздействием вибраций и колебаний ПС при неустановившихся режимах вождения. Физико-химические свойства характеризуют состояние груза, его способность вступать во взаимодействие с окружающей средой, вредно воздействовать на ПС, складские емкости, ПРМ, другие грузы, а также на здоровье людей. ...
0 комментариев