Навигация
Математическое описание элементов САР и определение их передаточных функций
21461
знак
11
таблиц
19
изображений
1.2 Математическое описание элементов САР и определение их передаточных функций
Тиристорный преобразовательТиристорный преобразователь в зависимости от возможности реверса, типа управления группами вентилей, режима работы описывается системой нелинейных дифференциальных уравнений. Его динамика, как элемента системы управления, отличается следующими особенностями:
1)преобразователь управляется не непрерывно, а дискретно;
2)преобразователь является полууправляемым устройством, поскольку тиристор открывается в момент подачи управляющего импульса, а закрывается - когда ток через него станет равен нулю.
Нелинейность тиристорного преобразователя вызывает появление низкочастотных биений при воздействии сигналов с частотой, большей частоты питающей сети, субгармонических колебаний в замкнутых системах при попытке организовать высокое быстродействие. Поэтому в целом тиристорный преобразователь, работающий в режиме непрерывного тока, с достаточной точностью можно представить одним динамическим безинерционным звеном с чистым запаздыванием, передаточная функция которого имеет вид:
![]() ,
,
где![]() - общее время запаздывания;
- общее время запаздывания;
![]() - время запаздывания силового преобразователя, которое принимается равным половине максимального времени запаздывания:
- время запаздывания силового преобразователя, которое принимается равным половине максимального времени запаздывания:
![]() =
= ,
,
где fсети – частота сети;
mв – число фаз выпрямления;
![]() - время запаздывания устройства управления, которое принимают равным:
- время запаздывания устройства управления, которое принимают равным:
- ![]() =0,07с для полупроводниково-емкостного устройства;
=0,07с для полупроводниково-емкостного устройства;
- ![]() =0 для СИФУ вертикального типа.
=0 для СИФУ вертикального типа.
С достаточной точностью тиристорный преобразователь, работающий в режиме непрерывного тока, можно представить инерционным звеном
 .
.
Если блок управления тиристорами имеет на входе фильтр для защиты от высокочастотных помех, то передаточная функция тиристорного преобразователя примет вид:

Если нет данных о постоянной времени фильтра, то ее можно принять равной Тф=0,005¸0,01 с.
Для упрощения расчетов тиристорный преобразователь можно представить инерционным звеном с передаточной функцией:
где Ттп=Тф+tз.
ДПТ при управлении по потоку
При рассмотрении математического описания двигателя постоянного тока принимаются допущения:
1) размагничивающее действие реакции якоря считается скомпенсированным;
2) индуктивность и сопротивление якорной цепи является постоянными величинами;
3) магнитный поток зависит линейно от намагничивающей силы.
Для построения структурной схемы запишем систему дифференциальных уравнений в операторном виде:
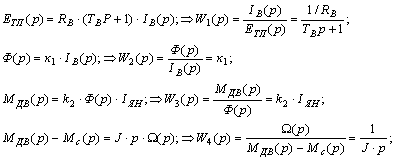
гдеRв - сопротивление обмотки возбуждения;
Тв - постоянная времени обмотки возбуждения;
Iв(p)- изображение тока обмотки возбуждения;
K1 - коэффициент пропорциональности между потоком и током возбуждения;
К2 - конструктивная постоянная электродвигателя.
Структурная схема ДПТ представлена на рисунке 1.2.

Рисунок 1.2 – ДПТ при управлении по потоку
Редуктор.Уравнение, описывающее редуктор:
Таким образом, структурная схема системы положения имеет вид, представленный в графической части.
1.3 Составление структурной схемы САРСтруктурная схема электропривода представлена в графической части.
Входным сигналом для системы является угол поворота сельсина-датчика. Если существует разница углов между сельсинами, то в обмотке сельсина-приемника наводится ЭДС, которая фиксируется датчиком рассогласования. Сигнал от датчика рассогласования является управляющим для регулятора положения.
Выходной сигнал регулятора положения является управляющим для контура скорости. На регулятор скорости поступает разница, между сигналом регулятора положения и датчиком скорости. Выходной сигнал регулятора скорости поступает на тиристорный преобразователь, на выходе которого получаем напряжение обмотки возбуждения двигателя.
В обмотке напряжение преобразуется в ток возбуждения. Далее ток умножается на коэффициент пропорциональности между током возбуждения и моментом (ток якоря при управлении постоянен), получается момент, развиваемый на роторе. От этого момента необходимо отнять момент сопротивления. Получается избыточный момент, который в электромеханической части двигателя преобразуется в скорость ротора. Полученную скорость ротора делим на передаточное отношение редуктора, получается угловая скорость рабочего органа. Если эту скорость проинтегрировать, то получится угол поворота рабочего органа и связанного с ним сельсина-приемника.
1.4 Расчет параметров элементов САРРассчитаем постоянную времени тиристорного преобразователя:
ТТП=ТФ+tЗ=0,005+![]() =0,005+
=0,005+![]() =0,01 с
=0,01 с
Далее найдем постоянные времени двигателей:
![]() с
с
Для расчета регуляторов определяем малую постоянную времени. Из приведенных выше расчетов видно, что постоянная времени тиристорного преобразователя меньше постоянной времени двигателя, следовательно, она и будет малой не компенсируемой постоянной времени.
Расчет регулятора скорости.
Структурная схема скорости имеет вид:
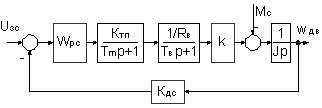
Рисунок 1.3—Контур скорости с регулятором
Передаточная функция регулятора скорости, настроенного на симметричный оптимум имеет следующий вид:
![]() ,
,
гдеаС, bС=2—коэффициенты демпфирования контура скорости;
Тm— малая постоянная времени;
WОКТ — передаточная функция объекта компенсации контура тока.
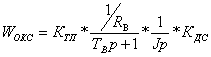
Для определения передаточной функции объекта компенсации необходимо записать передаточную функцию разомкнутого контура скорости без учета передаточной функции регулятора скорости и малых постоянных времени. Для этого размыкаем обратную связь и получаем:
Тогда передаточная функция регулятора тока будет иметь вид:
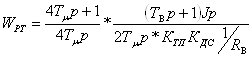
Регулятор тока представляется в виде двух частей: ПИ и ПД регуляторов.
Расчет регулятора положения.Для расчета регулятора положения представим контур скорости в виде звена:
Структурная схема контура положения имеет следующий вид:
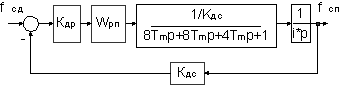
Рисунок 1.4—Контур положения с регулятором
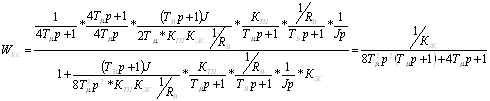
Строим ЛАЧХ разомкнутого контура положения, при этом пренебрегаем старшими степенями, т.к. коэффициенты при ним более, чем в 10 раз меньше коэффициентов при младшей степени:
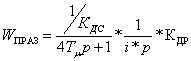
Далее строим желаемую ЛАЧХ системы. Передаточная функция желаемой ЛАЧХ имеет вид:
![]()
Для нахождения регулятора, отнимаем от желаемой ЛАЧХ, ЛАЧХ разомкнутой системы. Разность логарифмов — это деление их выражений. Поэтому передаточная функция регулятора будет равна отношению желаемой передаточной функции к передаточной функции разомкнутой системы:
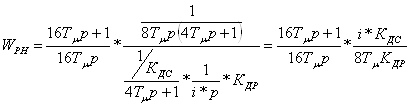
Первая часть — ПИ-регулятор, вторая — П.
Рисунки ЛАЧХ приведены в приложении Б.
1.6 Исследование устойчивости скорректированной САРДля нормального функционирования система должна возвращаться в исходное состояние после прекращения действия возмущающего воздействия. Для определения устойчивости системы воспользуемся правилом Ляпунова. По этому правилу для устойчивости системы необходимо, чтобы вещественная часть корней характеристического уравнения была отрицательной. Вывод передаточной функции замкнутой системы приведен в пункте 1.7.2.
Для нахождения корней уравнения воспользуемся математическим комплексом MathCAD. «Polyroots»—корни уравнения, коэффициенты которого задаются матрицей.
|
| Как видно корни характеристического уравнения имеют отрицательную вещественную часть. Значит система устойчива. |
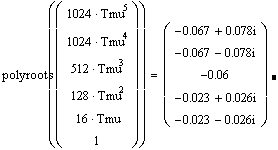
Полученные в результате расчета корни имеют отрицательную действительную часть. Поэтому система является устойчивой.
Похожие работы
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...


... управления и диагностики также произведен в данном дипломном проекте. ВЫВОДЫ И РЕКОМЕНДАЦИИ Результатом данного дипломного проекта является спроектированная система регулирования, контроля и регистрации потребления энергоносителей печью скоростного нагрева (ПСН) участка дифференцированной термической обработки прокатных валков, установленной в термическом цехе №2 ЗАО НКМЗ, ориентированная на ...
... соответствующие требованиям технической. 5 Энерго- и материалосбережение Для эффективного материалосбережения при разработке энергосберегающей системы освещения были применены следующие методы: 1. Уменьшение размеров печатной платы за счет увеличения плотности компоновки и рационального использование пространства платы, что экономит текстолит, затрачиваемый на изготовление платы. ...
... , с помощью которых можно создать как любое из перечисленных выше устройств, так и принципиально новое устройство. Цель курсовой работы - разработать микропроцессорную системы на базе микроконтроллера для спортивного велотренажера. 1. Описание объекта и функциональная спецификация Проблема ограничения времени, которое дети проводят за компьютером, многим родителям известна не понаслышке. О ...
0 комментариев